光伏方阵清洗系统及控制方法与流程
1.本发明属于光伏发电的技术领域,具体涉及一种光伏方阵清洗系统及控制方法。
背景技术:
2.光伏发电系统是指利用光伏电池的光生伏特效应,将太阳辐射能直接转换成电能的发电系统。通常情况下,光伏发电系统包括光伏阵列、蓄电池组、充电集中控制器、逆变器等。
3.光伏阵列包括多个光伏方阵,其输出功率受太阳光光照的影响较大。由于光伏方阵安装在室外,灰尘、砂砾、鸟类粪便以及其它污垢都可能附着在光伏方阵的上表面,影响光伏方阵对太阳光的接收,进而降低光伏方阵将光能转换为电能的效率。还影响光伏方阵的使用寿命。因此,需要对光伏方阵进行清洗以除去光伏方阵上表面的污垢,使光伏方阵充分利用光照,提高发电效率。
4.通常情况下,光伏方阵的清洗是通过人工完成的,需投入大量的人力和财力,成本较高。为了实现对光伏方阵的自动清洗,申请号为201620947205.5的专利文献公开了一种光伏板清洗装置,光伏方阵的外周安装有边框,边框的上下两侧通过第一导轨槽和第二导轨槽安装有清洁刷,通过电动机拉动第一拉绳或第二拉绳带动清洁刷左右运动,对光伏方阵进行清洁。申请号为202220676265.3的专利文献公开了一种双电机驱动太阳能光伏板清洁装置,其通过移动件带动移动块移动,进而带动第二支撑板移动,第二支撑板移动能够带动刷洗件在光伏方阵上方移动,第一电机带动转盘转动,进而带动毛刷对光伏方阵进行清扫,与此同时,喷水件对光伏方阵进行喷水,二者相配合实现对光伏方阵的清洗。
5.上述专利文献能够实现对光伏方阵的自动清洗,但是需要通过工作人员来判断清洁光伏方阵的时机。当工作人员观察到光伏方阵上的灰尘、砂砾、鸟类粪便等污垢较多时,通过启动清洗装置对光伏方阵进行清洗。
技术实现要素:
6.本发明所要解决的技术问题是提供一种光伏方阵清洗系统及控制方法,能够自动判断光伏方阵是否需要清洗,当光伏方阵需要清洗时,控制清洗装置对光伏方阵进行清洗。
7.本发明解决其技术问题所采用的技术方案是:光伏方阵清洗系统,包括:
8.清洗装置,用于清洗光伏方阵;
9.气象监测装置,用于获取天气信息;
10.光伏监控装置,用于获取所述光伏方阵的发电衰减效率;
11.所述光伏监控装置与所述气象监测装置通信连接,所述光伏监控装置接收所述天气信息,并根据所述发电衰减效率和天气信息,控制所述清洗装置清洗所述光伏方阵。
12.进一步的,所述清洗装置包括第一导轨、移动小车和清洗小车;
13.所述第一导轨与所述光伏方阵的边沿相邻安装,所述第一导轨的长度方向与所述光伏方阵的长度方向a相平行;所述第一导轨成对布置,两个所述第一导轨分别位于所述光
伏方阵宽度方向b的两端;
14.所述移动小车包括间隔设置于所述光伏方阵上方的第二导轨,所述第二导轨的长度方向与所述光伏方阵的宽度方向b相平行;所述第二导轨的两端均连接有连接板,所述光伏方阵位于两个所述连接板之间;所述移动小车的车轮通过两个所述连接板安装,并通过第一驱动电机驱动;所述移动小车的车轮与所述第一导轨滚动配合;
15.所述清洗小车包括底座,以及通过所述底座安装的水箱、第二驱动电机、蓄电池、毛刷、喷嘴和车轮;
16.所述清洗小车的车轮通过所述第二驱动电机驱动,所述清洗小车的车轮与所述第二导轨滚动配合;
17.所述毛刷和喷嘴位于所述底座的下方,所述毛刷与所述光伏方阵的上表面相接触,所述喷嘴与所述光伏方阵的上表面相对应布置;所述喷嘴与所述水箱通过管道相连通;所述管道上安装有用于控制所述管道连通或者断开的第一电磁阀;
18.所述第二驱动电机与蓄电池电连接;
19.所述光伏监控装置、第一驱动电机、第二驱动电机和第一电磁阀均与集中控制器通信连接。
20.进一步的,所述第二导轨设置有两个,两个所述第二导轨沿所述光伏方阵的长度方向a相间隔布置,所述连接板连接两个所述第二导轨;
21.所述清洗小车位于两个所述第二导轨之间。
22.进一步的,还包括供水管,以及安装于所述供水管上的第二电磁阀,所述供水管的出水口位于所述光伏方阵边沿的上方;
23.所述水箱的顶部开设有与其内腔相连通的进水口,所述进水口处安装有盖体,所述盖体通过驱动机构打开或者关闭;
24.所述水箱的内腔中安装有液位传感器;
25.所述底座上安装有导航定位模块;
26.所述第二电磁阀、液位传感器、驱动机构和导航定位模块均与所述集中控制器通信连接。
27.进一步的,所述底座为箱体结构,所述集中控制器、第二驱动电机、蓄电池、水管和导航定位模块均安装于所述箱体结构之内;
28.所述水箱固定安装于所述箱体结构的顶板上;
29.所述毛刷和喷嘴通过所述箱体结构的底板安装,且位于所述箱体结构之外。
30.进一步的,还包括充电座;
31.所述充电座通过所述第一导轨安装,所述充电座间隔设置于所述光伏方阵的上方,并与所述供水管的出水口相邻布置;
32.所述充电座上设置有朝向所述第一导轨内侧方的充电接口,所述清洗小车的底座上设置有与所述蓄电池电连接的充电端口,所述充电端口与所述充电接口相适配;
33.所述蓄电池与集中控制器通信连接。
34.进一步的,还包括激光探测器;
35.所述激光探测器安装于所述清洗小车的底座上,且位于所述底座的下部;所述集中控制器与所述激光探测器通信连接。
36.光伏方阵清洗的控制方法,采用光伏方阵清洗系统,包括步骤:
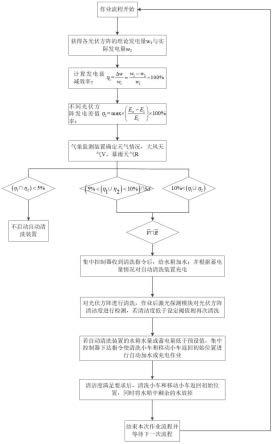
37.s1,气象监测装置监测光照强度,根据光照强度和历史发电情况,光伏监控装置计算光伏方阵的理论发电量,每天将光伏方阵的实际发电量与理论发电量进行比较得到发电衰减效率:
[0038][0039]
其中,w1为光伏方阵每天理论发电量,单位为kwh;
[0040]
w2为光伏方阵每天实际发电量,单位为kwh;
[0041]
δw为理论发电量与实际发电量的差值,单位为kwh;
[0042]
η1为光伏方阵的发电衰减效率。
[0043]
s2,每天将安装方式相同的光伏方阵的单位功率发电量进行比较,得到不同光伏方阵发电量差值率:
[0044]en
=wn/pn[0045]
其中,wn为第n个光伏方阵的实际发电功率,单位为kwh;
[0046]
pn为第n个光伏方阵装机容量,单位为kwp;
[0047]
en为第n个光伏方阵每天单位功率发电量,单位为kwh;
[0048][0049]
其中,η2为安装方式相同的光伏方阵与光伏方阵之间发电量差值率最大值;
[0050]
若发电衰减效率η1与发电量差值率η2都低于5%,则认为发电效率没有明显下降,不需要清洗;
[0051]
若发电衰减效率η1或发电量差值率η2高于5%,但小于10%超过3天,则认为需要启动清洗装置;
[0052]
若发电衰减效率η1或发电量差值率η2高于10%,则认为需要马上启动清洗装置;
[0053]
s3,根据气象监测装置监测到的天气情况,若大风v、暴雨r天气情况下,则光伏监控装置不启动清洗装置;
[0054][0055]
其中,为非大风天气,为非暴雨天气,s为清洗装置的启动判据;
[0056]
s4,集中控制器接收到光伏监控装置发出的清洗指令后,控制清洗装置清洗光伏方阵。
[0057]
与现有技术相比,本发明的有益效果是:本发明提供一种光伏方阵清洗系统及控制方法,能够自动判断光伏方阵是否需要清洗,当光伏方阵需要清洗时,控制清洗装置对光伏方阵进行清洗。通过对光伏方阵理论发电量与实际发电量的发电衰减效率、不同光伏方阵平均发电量差异情况、大风、以及暴雨因素来综合判断是否启动清洗装置。光伏方阵的清洗工作全部通过自动化完成,清洗及时、效率高,清洁效果好,降低了运维人员工作强度,提升了光伏方阵的能量转化效率。不仅适用于城市轨道交通的光伏发电系统,而且适用于与其有类似结构的分布式光伏发电系统。
附图说明
[0058]
图1是本发明的俯视结构示意图;
[0059]
图2是本发明的主视结构示意图;
[0060]
图3是本发明的清洗小车的结构示意图;(图中激光探测器未示出)
[0061]
图4是本发明的激光探测器的安装结构示意图;
[0062]
图5是本发明的清洗装置与光伏方阵相配合的立体结构示意图;(为简化视图,第一驱动电机、光伏支架、立柱、充电座等未示出)
[0063]
图6是本发明的流程图;
[0064]
附图标记:1-光伏方阵;2-光伏监控装置;3-气象监测装置;4-集中控制器;5-第一导轨;6-移动小车;601-第二导轨;602-连接板;603-车轮;7-清洗小车;701-底座;702-水箱;703-车轮;704-第二驱动电机;705-蓄电池;706-毛刷;707-喷嘴;708-管道;709-盖体;8-供水管;9-充电座;10-激光探测器;11-第一电磁阀;12-第二电磁阀;13-液位传感器;14-立柱;15-光伏支架;16-导航定位模块。
具体实施方式
[0065]
下面结合附图和实施例对本发明进一步说明。
[0066]
光伏方阵清洗系统,包括:清洗装置,用于清洗光伏方阵1;气象监测装置3,用于获取天气信息;光伏监控装置2,用于获取所述光伏方阵1的发电衰减效率;所述光伏监控装置2与所述气象监测装置3通信连接,所述光伏监控装置2接收所述天气信息,并根据所述发电衰减效率和天气信息,控制所述清洗装置清洗所述光伏方阵1。
[0067]
以一个光伏方阵1的清洗过程进一步说明。
[0068]
s1,气象监测装置3监测光照强度,根据光照强度和历史发电情况,光伏监控装置2计算光伏方阵1的理论发电量,每天将光伏方阵1的实际发电量与理论发电量进行比较得到发电衰减效率:
[0069][0070]
其中,w1为光伏方阵1每天理论发电量,单位为kwh;
[0071]
w2为光伏方阵1每天实际发电量,单位为kwh;
[0072]
δw为理论发电量与实际发电量的差值,单位为kwh;
[0073]
η1为光伏方阵的发电衰减效率。
[0074]
s2,每天将安装方式相同的光伏方阵1的单位功率发电量进行比较,得到不同光伏方阵1发电量差值率:
[0075]en
=wn/pn[0076]
其中,wn为第n个光伏方阵的实际发电功率,单位为kwh;
[0077]
pn为第n个光伏方阵装机容量,单位为kwp;
[0078]
en为第n个光伏方阵每天单位功率发电量,单位为kwh;
[0079][0080]
其中,η2为安装方式相同的光伏方阵与光伏方阵之间发电量差值率最大值;
[0081]
若发电衰减效率η1与发电量差值率η2都低于5%,则认为发电效率没有明显下降,不需要清洗;
[0082]
若发电衰减效率η1或发电量差值率η2高于5%,但小于10%超过3天,则认为需要启动清洗装置;
[0083]
若发电衰减效率η1或发电量差值率η2高于10%,则认为需要马上启动清洗装置;
[0084]
s3,根据气象监测装置3监测到的天气情况,若大风v、暴雨r天气情况下,则光伏监控装置2不启动清洗装置;
[0085][0086]
其中,为非大风天气,为非暴雨天气,s为清洗装置的启动判据。
[0087]
大风v,具体是指风力大于四级。
[0088]
s4,集中控制器4接收到光伏监控装置2发出的清洗指令后,控制清洗装置清洗光伏方阵1。
[0089]
清洗装置可以采用现有的结构,如申请号为201620947205.5的专利文献中公开的光伏板清洗装置,又如申请号为202220676265.3的专利文献中公开的双电机驱动太阳能光伏板清洁装置。集中控制器4可以选用单片机或者plc可编程控制器。
[0090]
优选的,所述清洗装置包括第一导轨5、移动小车6和清洗小车7;所述第一导轨5与所述光伏方阵1的边沿相邻安装,所述第一导轨5的长度方向与所述光伏方阵1的长度方向a相平行;所述第一导轨5成对布置,两个所述第一导轨5分别位于所述光伏方阵1宽度方向b的两端;所述移动小车6包括间隔设置于所述光伏方阵1上方的第二导轨601,所述第二导轨601的长度方向与所述光伏方阵1的宽度方向b相平行;所述第二导轨601的两端均连接有连接板602,所述光伏方阵1位于两个所述连接板602之间;所述移动小车6的车轮603通过两个所述连接板602安装,并通过第一驱动电机驱动;所述移动小车6的车轮603与所述第一导轨5滚动配合;所述清洗小车7包括底座701,以及通过所述底座701安装的水箱702、第二驱动电机704、蓄电池705、毛刷706、喷嘴707和车轮703;所述清洗小车7的车轮703通过所述第二驱动电机704驱动,所述清洗小车7的车轮703与所述第二导轨601滚动配合;所述毛刷706和喷嘴707位于所述底座701的下方,所述毛刷706与所述光伏方阵1的上表面相接触,所述喷嘴707与所述光伏方阵1的上表面相对应布置;所述喷嘴707与所述水箱702通过管道708相连通;所述管道708上安装有用于控制所述管道708连通或者断开的第一电磁阀11;所述第二驱动电机704与蓄电池705电连接;所述光伏监控装置2、第一驱动电机、第二驱动电机704和第一电磁阀11均与集中控制器4通信连接。
[0091]
第一导轨5可以通过立柱14或者光伏支架15安装,通过第一导轨5与移动小车6的车轮603的滚动配合,为移动小车6沿光伏方阵1长度方向a的运动提供导向支撑作用。光伏方阵1位于两个第一导轨5之间。第二导轨601为清洗小车7沿光伏方阵1宽度方向b的运动提供导向支撑作用。实现对光伏方阵1的全面清洗,减小清洗小车7的体积。底座701为水箱702、第二驱动电机704、蓄电池705、毛刷706、喷嘴707以及车轮703提供安装支撑。蓄电池705为第二驱动电机704提供电能。水箱702的内腔通过管道708与喷嘴707相连通。集中控制器4控制第一电磁阀11的打开或者关闭。在管道708上安装电磁阀以实现对管道708通断的控制是现有技术。清洗小车7位于光伏方阵1的上方,清洗小车7的毛刷706与光伏方阵1的上
表面相接触,清洗小车7的喷嘴707向光伏方阵1的上表面相喷水。光伏监控装置2向集中控制器4发出清洗指令,集中控制器4接收到清洗指令后,向第一驱动电机、第二驱动电机704分别发送驱动信号,向第一电磁阀11发送打开信号,水箱702中的水通过喷嘴707喷淋在光伏方阵1的上表面。在移动小车6与清洗小车7的配合运动下,毛刷706将附着于光伏方阵1上的污垢清扫掉。清洗完成后,集中控制器4向第一驱动电机、第二驱动电机704分别发送停机信号,向第一电磁阀11发送关闭信号。
[0092]
第二导轨601可以设置一个,优选的,所述第二导轨601设置有两个,两个所述第二导轨601沿所述光伏方阵1的长度方向a相间隔布置,所述连接板602连接两个所述第二导轨601;所述清洗小车7位于两个所述第二导轨601之间。设置两个第二导轨601,不仅能对清洗小车7稳定支撑,而且使清洗小车7的运动平稳,提高装置的可靠性。
[0093]
为了实现对水箱702的自动加水,优选的,还包括供水管8,以及安装于所述供水管8上的第二电磁阀12,所述供水管8的出水口位于所述光伏方阵1边沿的上方;所述水箱702的顶部开设有与其内腔相连通的进水口,所述进水口处安装有盖体709,所述盖体709通过驱动机构打开或者关闭;所述水箱702的内腔中安装有液位传感器13;所述底座701上安装有导航定位模块16;所述第二电磁阀12、液位传感器13、驱动机构和导航定位模块16均与所述集中控制器4通信连接。
[0094]
水箱702中安装的液位传感器13实时检测水箱702内腔中的水位高低,并将检测液位信号发送给集中控制器4,集中控制器4将检测液位值与第一预设液位值进行比较,当检测液位值小于第一预设液位值时,说明水箱702内水量不足。导航定位模块16实时检测清洗小车7的所在位置,并将检测位置信息发送给集中控制器4,集中控制器4将检测位置数据与预设位置数据进行对比后,向第一驱动电机和第二驱动电机704分别发送驱动信号,使清洗小车7运动至初始位置。当清洗小车7运动至初始位置时,盖体709位于供水管8出水口的下方。还可以采用现有的扫地机器人运动至指定地点的控制方式。当清洗小车7运动至初始位置时,集中控制器4向驱动机构发送打开盖体信号,驱动机构驱动盖体709打开;集中控制器4向第二电磁阀12发送打开信号,供水管8向水箱702中加水。液位传感器13实时检测水箱702内腔中的水位高低,集中控制器4将检测液位值与第二预设液位值进行比较,当检测液位值大于第二预设液位值时,说明水箱702内水量充足,集中控制器4向第二电磁阀12发送关闭信号,供水管8停止向水箱702中加水;集中控制器4向驱动机构发送关闭盖体信号,驱动机构驱动盖体709关闭。第二预设液位值大于第一预设液位值。驱动机构为现有技术中的结构,如申请号为202020809264.2的专利文献中公开的箱盖开闭机构。导航定位模块16为现有的结构。
[0095]
所述底座701为箱体结构,所述集中控制器4、第二驱动电机704、蓄电池705、水管708和导航定位模块16均安装于所述箱体结构之内;所述水箱702固定安装于所述箱体结构的顶板上;所述毛刷706和喷嘴707通过所述箱体结构的底板安装,且位于所述箱体结构之外。
[0096]
为了实现对清洗小车7的自动充电,优选的,还包括充电座9;所述充电座9通过所述第一导轨5安装,所述充电座9间隔设置于所述光伏方阵1的上方,并与所述供水管8的出水口相邻布置;所述充电座9上设置有朝向所述第一导轨5内侧方的充电接口,所述清洗小车7的底座701上设置有与所述蓄电池705电连接的充电端口,所述充电端口与所述充电接
口相适配;所述蓄电池705与集中控制器4通信连接。第一导轨5为充电座9提供安装支撑,第一导轨5内侧方具体是指,两个第一导轨5相对应布置的侧面。集中控制器4上集成设置的电量检测模块实时检测蓄电池705的电量,与预设电量值比较后判断电量是否充足。当集中控制器4上的电量检测模块检测到蓄电池705的电量不足时,集中控制器4向第一驱动电机、第二驱动电机704分别发送驱动信号,在导航定位模块16的配合下,使清洗小车7、移动小车6运动至初始位置,充电接口与充电端口电连接,进而对蓄电池705充电。充电座9由所在区域的变电所进行供电。
[0097]
还包括激光探测器10,所述激光探测器10安装于所述清洗小车7的底座701上,且位于所述底座701的下部;所述集中控制器4与所述激光探测器10通信连接。激光探测器10包括激光发射模块和接收模块,激光发射模块向光伏方阵1的上表面发射激光,接收模块接收反射回的光束,集中控制器4将发射出的激光束与接收到的光束进行对比,计算激光衰减度,以判断光伏方阵1是否被清洗干净。当光伏方阵1被清洗干净时,通过导航定位模块16的配合,集中控制器4控制清洗小车7和移动小车6返回初始位置。当光伏方阵1未被清洗干净时,清洗小车7和移动小车6继续作业。优选的,激光探测器10设置有两个,两个激光探测器10分别位于底座701沿光伏方阵1的宽度方向b的两端。
[0098]
光伏方阵清洗的控制方法,采用光伏方阵清洗系统,包括步骤:
[0099]
s1,气象监测装置3监测光照强度,根据光照强度和历史发电情况,光伏监控装置2计算光伏方阵1的理论发电量,每天将光伏方阵1的实际发电量与理论发电量进行比较得到发电衰减效率:
[0100][0101]
其中,w1为光伏方阵1每天理论发电量,单位为kwh;
[0102]
w2为光伏方阵1每天实际发电量,单位为kwh;
[0103]
δw为理论发电量与实际发电量的差值,单位为kwh;
[0104]
η1为光伏方阵1的发电衰减效率。
[0105]
s2,每天将安装方式相同的光伏方阵1的单位功率发电量进行比较,得到不同光伏方阵1发电量差值率:
[0106]en
=wn/pn[0107]
其中,wn为第n个光伏方阵的实际发电功率,单位为kwh;
[0108]
pn为第n个光伏方阵装机容量,单位为kwp;
[0109]
en为第n个光伏方阵每天单位功率发电量,单位为kwh;
[0110][0111]
其中,η2为安装方式相同的光伏方阵与光伏方阵之间发电量差值率最大值。
[0112]
若发电衰减效率η1与发电量差值率η2都低于5%,则认为发电效率没有明显下降,不需要清洗;
[0113]
若发电衰减效率η1或发电量差值率η2高于5%,但小于10%超过3天,则认为需要启动清洗装置;
[0114]
若发电衰减效率η1或发电量差值率η2高于10%,则认为需要马上启动清洗装置;
[0115]
s3,根据气象监测装置3监测到的天气情况,若大风v、暴雨r天气情况下,则光伏监控装置2不启动清洗装置;
[0116][0117]
其中,为非大风天气,为非暴雨天气,s为清洗装置的启动判据。
[0118]
大风v,具体是指风力大于四级。
[0119]
s4,集中控制器4接收到光伏监控装置2发出的清洗指令后,控制清洗装置清洗光伏方阵1。
[0120]
s5,激光探测器10对光伏方阵1的清洁度进行检测,若清洁度低于设定阈值,则再次清洗。
[0121]
s6,若水箱702内腔中的水位低于第一预设液位,则由集中控制器4控制移动小车6和清洗小车7返回初始位置进行自动加水作业。
[0122]
s7,若蓄电池705的电量低于电量预设值,则由集中控制器4控制移动小车6和清洗小车7返回初始位置进行充电作业。
[0123]
步骤s6和s7的顺序可以互换。
[0124]
s8,激光探测器10检查到光伏方阵1的清洁度满足要求后,通过导航定位模块16的配合,集中控制器4控制移动小车6和清洗小车7返回初始位置,控制第一电磁阀11打开,将水箱702中剩余的水经喷嘴707放掉,结束本次作业流程。
[0125]
以上为本发明的具体实施方式,从实施过程可以看出,本发明提供一种光伏方阵清洗系统及控制方法,能够自动判断光伏方阵是否需要清洗,当光伏方阵需要清洗时,控制清洗装置对光伏方阵进行清洗。通过对光伏方阵理论发电量与实际发电量的发电衰减效率、不同光伏方阵平均发电量差异情况、大风、以及暴雨因素来综合判断是否启动清洗装置。光伏方阵的清洗工作全部通过自动化完成,清洗及时、效率高,清洁效果好,降低了运维人员工作强度,提升了光伏方阵的能量转化效率。不仅适用于城市轨道交通的光伏发电系统,而且适用于与其有类似结构的分布式光伏发电系统。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1