一种基于扰动跟随方法的下垂型逆变器快速频率控制方法与流程
1.本发明提供了一种基于扰动跟随方法的下垂型逆变器快速频率控制方法,属于电力系统频率控制技术领域。
背景技术:
2.电力系统频率反映了功率平衡状态,是电网安全运行的重要参数。当电网遭受扰动时,功率失衡,则会导致频率偏移。频率偏差包括最大暂态频率偏差和最大稳态频率偏差(maximum steady-state frequency deviation,mssfd),mssfd指的是一次调频过后,与标准频率(50hz)之间的差值。在目前以同步发电机(synchronous generator,sg)为主的电网中,惯量充沛,暂态频率下降速度慢,暂态频率偏差通常低于允许值。然而,当电网遭受较大扰动时,稳态频率偏差易超过mssfd。
3.下垂控制是应用最广泛的频率控制策略,能快速提供与频率偏差成正比的调频功率。扰动较小时,需逆变器输出的调频功率较小,频率偏差也较小;然而随着扰动增大,需要的调频功率越多,则频率偏差也越大,超过mssfd指标的风险也越大。
技术实现要素:
4.本发明为了抑制稳态频率偏差,提出了基于扰动跟随方法的功率下垂型逆变器快速频率控制方法,使逆变器的有效调频区域跟随扰动,即补偿功率与扰动相匹配,把下垂控制难以应对的大扰动转化为可有效控制的小扰动,实现对稳态频率偏差的快速抑制。
5.为了解决上述技术问题,本发明采用的技术方案为:一种基于扰动跟随方法的下垂型逆变器快速频率控制方法,包括如下步骤:s1:电网遭受扰动δp
l
后,通过锁相环pll快速测量出受扰频率,计算公式如下:;上式中:δf(t)为电网受扰后频率偏差,δp
l
为电网受扰动频率,dg为电网阻尼系数,k
p
为逆变器下垂系数,hg为电网惯量常数;通过高通滤波器hph测量出最大频率变化率r
meas
,计算公式如下:;上式中:r(t)为频率变化率;s2:根据受扰频率和最大频率变化率估计扰动功率,计算公式如下:;
上式中:为扰动估计值;s3:将扰动估计值作为逆变器的调频指令,判断估计的扰动功率是否在逆变器的有效调频区域内,并制定相应的扰动调整策略。
6.还包括s4:考虑逆变器的功率约束,则调频指令为:(9);上式中,pm为逆变器最大备用功率,其值为pm=p
rated-p0,p
rated
为逆变器额定功率,p0为扰动前逆变器输出功率。
7.当频率偏差恰好满足mssfd要求时,逆变器输出的调频功率为:(10);上式中,f
std
为设定的mssfd指标。
8.所述扰动调整策略为:判断扰动估计值是否在逆变器的有效调频区域内,即判断当前额定工作点下稳态频率偏差指标是否满足要求,若满足,表明无需跟随扰动,则p
dfm
=0;反之,若不满足,表明当前额定工作点需跟随扰动调整,则p
dfm
=δp
*
,p
dfm
为逆变器快速增发功率,扰动跟随后,稳态频率偏差δfm为:;上式中:δp
l
为电网受扰动频率,p
dfm
为逆变器快速增发功率,dg为电网阻尼系数,k
p
为逆变器下垂系数。
9.对于扰动超出了逆变器备用功率(δp
l
》pm)的情况,扰动跟随方法确定的p
dfm
则为备用功率上限pm,相当于立即使逆变器满功率运行。
10.若扰动δp
l
在有效调频区域内,扰动跟随方法按照调频指令平移额定工作点,则有效调频区域也随之调整为[p0+δp
*
−
δp
std
,p0+δp
*
+δp
std
],p0为扰动前逆变器输出功率,δp
*
为调频指令,δp
std
为逆变器输出的调频功率。
[0011]
本发明相对于现有技术具备的有益效果为:本发明提供的基于扰动跟随方法的功率下垂型逆变器快速频率控制方法,根据sg和功率下垂型逆变器调频技术的功率相似性与时序相异性,将额定工作点调整这一时序前移,可快速抑制频率偏差;提出了扰动跟随方法,可自主地判断是否需要跟随扰动,且既不过度跟随也不跟随不足。仿真结果表明本发明的控制策略在不同扰动下都能可靠跟随,有效抑制频率偏差。
附图说明
[0012]
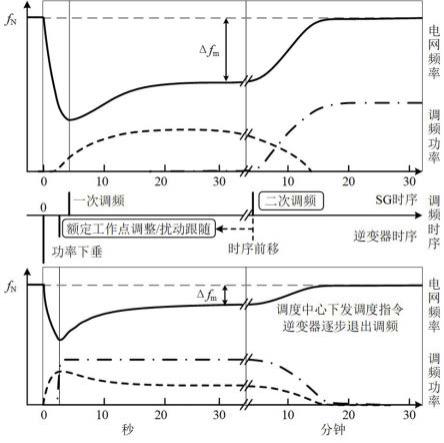
下面结合附图对本发明做进一步说明:图1为同步发电机组和逆变器调频时序相异性的示意图;图2为本发明下垂控制的有效调频区域示意图;图3为本发明扰动跟随方法的原理示意图;图4为采用本发明方法实现下垂控制的有效调整区域的示意图;
图5为利用matlab/simulink仿真软件来验证本发明频率控制策略与传统控制的对比图。
具体实施方式
[0013]
为了对本发明提出的基于扰动跟随方法的下垂型逆变器快速频率控制方法进行说明,下面根据其得出的原理进行详细解释。
[0014]
1 同步发电机和功率下垂型逆变器调频技术的功率相似性与时序相异性在调频功率方面,sg的一次调频技术和逆变器的下垂控制技术都是利用或模拟了sg外特性,因此频率特性可统一写成:(1);式中,k为调频特性曲线的斜率,即一次调频系数(sg)或下垂系数(逆变器);δp为输出功率的变化量;δfm为稳态频率偏差,定义为δf
m =f
n-fm,fn为电力系统额定频率,fm为电力系统稳态频率。
[0015]
根据式(1),sg和逆变器根据频率偏差自主地调整输出功率δp的大小,相当于工作点在调频特性曲线上线性移动,即一次调频技术(sg)或功率下垂特性(逆变器)。
[0016]
若在初始功率的基础上叠加调频指令δp*,则式(1)可改写为:(2);式(2)表明,叠加调频指令δp*后,频率特性曲线向上平移了δp*,相当于将扰动大小减小了δp*,转化为小扰动,对抑制稳态频率偏差δfm起着主导作用。叠加调频指令δp*,即为二次调频技术(sg)或额定工作点调整(逆变器)。
[0017]
除上述功率相似性外,sg和功率下垂型逆变器调频技术在时序上还存在相异性,如图1所示。
[0018]
对于sg,一次二次调频在调频时序上存在先后顺序,且一次调频完成后需等待数十分钟后才能进行二次调频。对于逆变器,在调频功率上与二次调频对应的额定工作点调整,却能在短时间内快速完成,且在调频时序上与功率下垂特性互不影响。
[0019]
如图1所示,根据上述相似性与差异性,在扰动发生后,若使逆变器额定工作点快速调整,则相当于把对频率起主导作用的二次调频时序提前,不仅显著抑制了稳态频率偏差,还提高了抑制速度。
[0020]
此外由式(2)可知,调频指令δp*越接近扰动δp
l
,则稳态频率偏差δfm越小,若δp*恰好等于δp
l
,则δfm=0。遗憾的是扰动大小δp
l
难以快速且准确获取。然而,根据电网导则规定,只要δfm小于mssfd即可,因此逆变器只需通过调整额定工作点将大扰动转化为小扰动,即仅需大致跟随,无需准确跟踪。正如同二次调频也分有差调频和无差调频,在大多数情况下有差调频的结果电网也是接受的。
[0021]
2 扰动跟随方法根据前述分析可知,为抑制稳态频率偏差,需使逆变器下垂控制额定工作点跟随扰动调整,为此首先需估计扰动功率大小。
[0022]
2.1 扰动功率估计电网遭受扰动δp
l
后,频率变化过程可由下式描述:
(3);式中,hg为电网惯量常数;δf(t)为频率偏差,定义为δf(t)=f
n-f(t);fn为额定频率;pg为电网吸收功率;p为逆变器系统送出功率。随着频率偏差δf(t)的增大,电网的阻尼特性和逆变器的功率下垂特性将响应电网频率变化,即:(4);式中,dg为电网阻尼系数;k
p
为逆变器下垂系数。
[0023]
将式(4)带入式(3)中,可得到频率f(t)动态过程为:(5);求解式(5),即可获得受扰后频率偏差δf(t)和频率变化率r(t)为:(6);(7);由式(6)和式(7)可知,在扰动发生初始,频率偏差为最小值0,而频率变化率幅值达到最大值。若忽略测量时延,假设频率变化率的测量值为r
meas
,带入式(5),则可获得扰动估计值为:(8);式(8)中,电网惯量hg主要由sg提供,可在电网日常运行中测量得到。至于频率变化率测量值r
meas
,通常采用锁相环(pll)和高通滤波器(hpf)的方案获得。由于hpf的幅值衰减作用,频率变化率的测量值r
meas
通常小于真实值,则式(8)得到的扰动估计值小于扰动真实值δp
l
。因此若将扰动估计值作为逆变器的调频指令,可将大扰动转换为同向的小扰动,并避免逆变器输出功率大于扰动功率造成反向扰动。此外考虑逆变器的功率约束,则调频指令为:(9);式中,pm为最大备用功率,其值为pm=p
rated-p0,p
rated
为额定功率,p0为扰动前逆变器输出功率。
[0024]
2.2 扰动跟随原理由式(1)和式(6)可知,扰动越大,频率偏差越大,则逆变器输出的调频功率越大。当频率偏差恰好满足mssfd要求时,逆变器输出的调频功率为:(10);
式中,f
std
为设定的mssfd指标,即电网导则规定的mssfd指标。
[0025]
如图2所示,扰动前逆变器处于额定工作点a,频率为额定值。扰动后,若逆变器工作点移动至s点,则调频功率为δp
std
,稳态频率偏差为f
std
,即达到电网频率安全的临界频率曲线。
[0026]
以扰动功率突增工况为例,若扰动较小,频率偏移小于f
std
,逆变器调频功率小于δp
std
,则工作点移动至b点即可。若扰动较大,频率偏差大于f
std
,逆变器需提供更多的调频功率,则工作点移动到更远的c点。由图2可知,b点处稳态频率偏差满足mssfd要求,表明逆变器足以应对该扰动。相反,c点处的稳态频率偏差超过了mssfd,表明扰动过大超过了逆变器的调频能力。综上所述,逆变器的有效调频区域为[p0−
δp
std
,p0+δp
std
]。
[0027]
如图3所示,若扰动δp
l1
在有效调频区域内,表明逆变器可将频率偏差抑制在f
std
内。随着扰动增大至δp
l2
,稳态频率偏差也随之增大并超过f
std
,表明扰动越过了有效调频区域。此时需使额定工作点跟随扰动调整,以使有效调频区域覆盖扰动。扰动跟随方法是按照式(9)平移额定工作点,则有效调频区域也随之调整为[p0+δp
*
−
δp
std
,p0+δp
*
+δp
std
]。
[0028]
此时,扰动δp
l2
重新处于有效调频区域之内,稳态频率偏差也从δf
m2
(》f
std
)抑制为,实现了额定工作点跟随扰动调整。此外,式(8)对扰动大小的弱估计也避免了对扰动的过度跟随。
[0029]
对于极其严重的扰动,扰动估计值超过了逆变器最大备用功率pm,则额定工作点调整至额定功率p
rated
,且有效调频区域仅下半部分有效。
[0030]
在扰动跟随后,扰动被等效减小为δp
l-δp
*
,相当于将逆变器难以应对的大扰动转化为小扰动,既充分发挥了逆变器在小扰动工况下的调频性能,又充分利用了预留的备用容量来抵御扰动。
[0031]
3 基于扰动跟随方法的快速频率控制方法为了改善受扰电网的稳态频率偏差指标,本发明提出了基于扰动跟随方法的快速频率控制策略,控制框图如图4所示。
[0032]
当电网遭受扰动时,pll快速测量出受扰频率,经hpf测量出最大频率变化率r
meas
。随后按照式(8)估计扰动大小,并判断是否在逆变器的有效调频区域内,即判断当前额定工作点下稳态频率偏差指标是否满足要求,若满足,表明无需跟随扰动,则p
dfm
=0;反之,若不满足,表明当前额定工作点需跟随扰动调整,则p
dfm
=δp
*
。扰动跟随后,逆变器快速增发功率p
dfm
,则由式(6)可知,稳态频率偏差δfm为:(11);式(11)表明,扰动跟随后,δfm被显著降低了,且扰动跟随得越精准,则δfm的抑制效果越好。
[0033]
此外,对于扰动超出了逆变器备用功率(δp
l
》pm)这一严重情况,扰动跟随方法确定的p
dfm
则为备用功率上限pm,相当于立即使逆变器满功率运行,此时其频率控制效果与rpc控制类似。
[0034]
4 仿真验证本发明利用matlab/simulink仿真软件来验证所提频率控制策略的有效性、先进
性。测试系统采用标准的四机两区域模型,其中区域2的一台sg用逆变器取代,额定功率p
mrated
=80mw(功率基准值),最大备用功率pm=0.375p.u.。电网mssfd指标f
std
=0.2hz。本发明在电网遭受不同扰动时,分别测试了无控制、下垂控制、rpc(无模式切换)和dfm的调频性能。如图5所示,图5中电网频率和逆变器输出功率:(a-b),δpl=0.0625p.u.;(c-d),δpl=0.25 p.u.,(e-f),δpl=0.4375 p.u.。
[0035]
如图5(a)所示,电网遭受0.0625p.u.扰动时,扰动较小,扰动本就处于有效调频区域内,逆变器无需跟随扰动,dfm与下垂控制的仿真结果完全一致。
[0036]
如图5(c)所示,当扰动增大至0.25p.u.时,即使下垂控制的逆变器输出了更多的调频功率,也仅使稳态频率偏差抑制在了0.21hz,表明扰动超出了有效调频区域。因此,当逆变器采用dfm跟随扰动后,重新使扰动处于有效调频区域,稳态频率偏差降低至0.03hz。上述结果说明,dfm能够根据扰动强弱可靠地判断是否需要跟随扰动,并有效地抑制稳态频率偏差。
[0037]
如图5(e)所示,当电网遭受严重扰动(0.4375p.u.》pm)时,经过扰动跟随后,逆变器已处于满功率运行状态,与rpc控制相同,因此两种控制下的稳态频率偏差一致。
[0038]
此外,仿真结果还说明dfm具有以下优势:(1)提高了备用功率的利用率;(2)提高了频率偏差抑制速度;(3)无需复杂的模式切换(小扰动时,rpc控制要么进行复杂的状态切换,要么过度补偿,造成反向扰动(图5(c))。
[0039]
传统下垂控制受限于功率下垂特性,仅在频率偏差较大时才能输出较大的调频功率,但稳态频率偏差已经超过了mssfd指标。为此,本发明提出了基于扰动跟随方法的功率下垂型逆变器快速频率控制方法。根据sg和功率下垂型逆变器调频技术的功率相似性与时序相异性,将额定工作点调整这一时序前移,可快速抑制频率偏差;提出了扰动跟随方法,可自主地判断是否需要跟随扰动,且既不过度跟随也不跟随不足。仿真结果表明所提控制在不同扰动下都能可靠跟随,有效抑制频率偏差。
[0040]
关于本发明具体结构需要说明的是,本发明采用的各部件模块相互之间的连接关系是确定的、可实现的,除实施例中特殊说明的以外,其特定的连接关系可以带来相应的技术效果,并基于不依赖相应软件程序执行的前提下,解决本发明提出的技术问题,本发明中出现的部件、模块、具体元器件的型号、相互间连接方式以及,由上述技术特征带来的常规使用方法、可预期技术效果,除具体说明的以外,均属于本领域技术人员在申请日前可以获取到的专利、期刊论文、技术手册、技术词典、教科书中已公开内容,或属于本领域常规技术、公知常识等现有技术,无需赘述,使得本案提供的技术方案是清楚、完整、可实现的,并能根据该技术手段重现或获得相应的实体产品。
[0041]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1