用于五自由度磁悬浮轴承的电力电子控制器及控制方法
本发明属于磁悬浮轴承控制领域,更具体地,涉及一种用于五自由度磁悬浮轴承的电力电子控制器及控制方法。
背景技术:
1、磁悬浮轴承是指利用电磁力使转子悬浮,从而实现转子与定子的无接触运行。磁悬浮轴承具有无摩擦、无污染、寿命长等特点,适合应用于高速、超高速以及需要无接触、无润滑、无污染的高性能传动场合。外国相关产品起步较早,自上世纪70年代便已进入实际应用阶段;国内对磁悬浮轴承的研究起步相对较晚,但经学术界与工业界几十年的发展,相关技术已经取得了长足进步,产品逐渐得到应用,如磁悬浮轴承飞轮储能、磁悬浮离心式鼓风机等,具有很好的应用前景。
2、对于一个主动磁悬浮轴承系统来说,其需要一套控制系统来实现对每一绕组电磁力大小的调控。功率放大器接受控制器控制信号将指令电流转化为实际电流,是控制系统中的关键部分。作为磁悬浮轴承支承对象的转子具有5个自由度,这决定了磁悬浮轴承系统至少是一个5自由度系统。多自由度使得磁悬浮轴承具有大量待控绕组,使用传统全桥等拓扑结构需要大量电力电子器件及其驱动,会使得整个控制系统结构复杂、体积大、成本高。目前已有学者提出采用共用桥臂的方法来减少电力电子器件数,其控制10个绕组需要24个电力电子器件;或是通过省去共用桥臂实现用16个电力电子器件控制8个绕组,外加6个电力电子器件实现剩下2个绕组的控制,共需22个电力电子器件。这两种方式仍未能全局最优化器件数量,均仍需较多的电力电子器件,而较多的电力电子器件使得整个控制系统结构复杂、体积大、成本高。
技术实现思路
1、针对现有技术的缺陷和改进需求,本发明提供了一种用于五自由度磁悬浮轴承的电力电子控制器及控制方法,其目的在于降低五自由度磁悬浮轴承的电力电子控制器的复杂度,同时减小控制器的体积及成本。
2、为实现上述目的,按照本发明的一个方面,提供了一种用于五自由度磁悬浮轴承的电力电子控制器,所述五自由度磁悬浮轴承包括十个绕组,将所述十个绕组均分为两组,每组中的五个绕组记为第一至第五绕组,所述控制器包括:
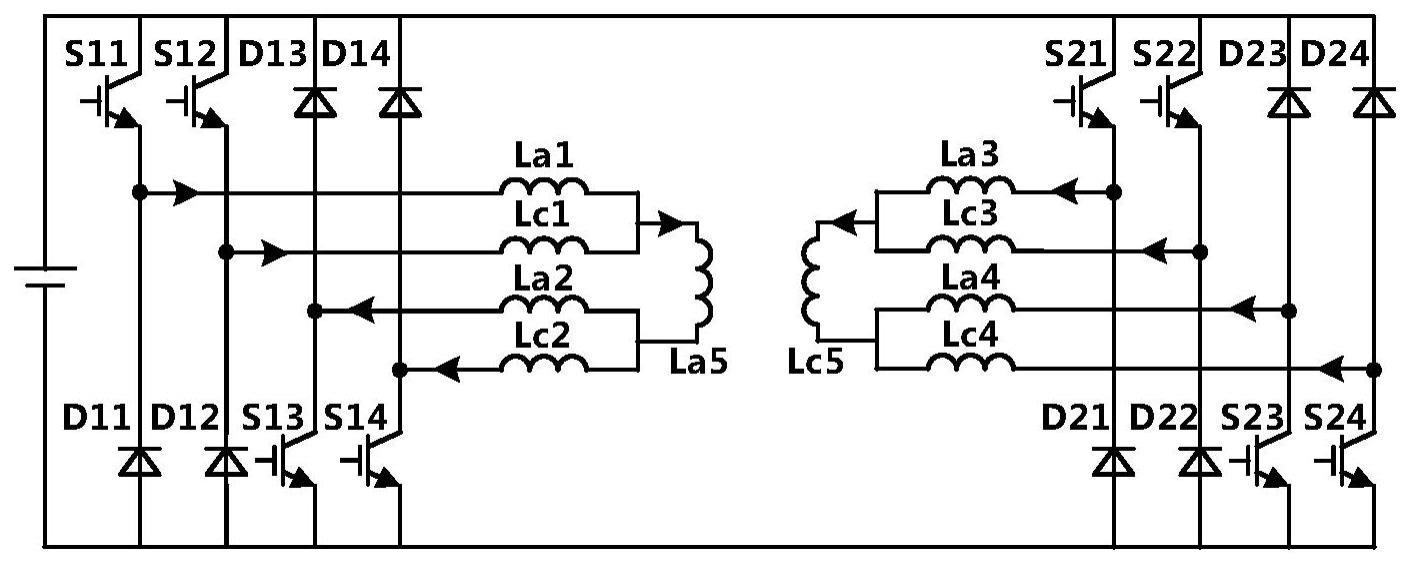
3、八个可控开关和八个单向导通器件,一个可控开关与一个单向导通器件串联形成一个桥臂,将形成的八个桥臂均分为两组,每组中的四个桥臂记为第一至第四桥臂;其中,每个绕组、可控开关及单向导通器件均包括第一端和第二端,所述绕组及所述可控开关以电流流入的一端作为第一端,电流流出的一端作为第二端,所述单向导通器件以电流流出的一端作为第一端,电流流入的一端作为第二端;
4、每组中的四个桥臂并联在电源两端,第一、第二桥臂中,可控开关的第一端与电源的正极连接,第二端与单向导通器件的第一端串联连接,单向导通器件的第二端与电源的负极连接;第三、第四桥臂中,单向导通器件的第一端连接至电源正极,第二端与可控开关的第一端串联连接,可控开关的第二端连接至电源负极;
5、每组桥臂中,第一、第二桥臂的中点分别连接第一、第二绕组的第一端,第一、第二绕组的第二端并接在一起后连接第五绕组的第一端;第三、第四桥臂的中点分别连接第三、第四绕组的第二端,第三、第四绕组的第一端并接在一起后连接第五绕组的第二端。
6、进一步地,所述可控开关均为主动开关管,所述单向导通器件均为二极管。
7、进一步地,所述主动开关管为igbt或mosfet。
8、进一步地,所述可控开关的第一端为igbt的集电极,第二端为igbt的发射极;
9、所述单向导通器件的第一端为二极管的负极,第二端为二极管的正极。
10、进一步地,流经所述绕组的电流为单向电流。
11、按照本发明的第二方面,提供了一种实现如第一方面任意一项所述的一种用于五自由度磁悬浮轴承的电力电子控制器的控制方法,包括:
12、控制所述可控开关的导通时间占空比,使所述控制器工作在五种基础工作模态之一;针对两组桥臂中的任意一组桥臂,所述五种基础工作模态包括:
13、第一基础工作模态:控制四个桥臂中点等效占空比均相等,使五个绕组电流均保持不变;
14、第二基础工作模态:控制第一、第二桥臂中点等效占空比相等并均高于第三、第四桥臂中点等效占空比,使第一、二绕组的电流之和与第三、四绕组的电流之和均增大;
15、第三基础工作模态:控制第三、第四桥臂中点等效占空比相等并均高于第一、第二桥臂中点等效占空比,使第一、二绕组的电流之和及第三、四绕组的电流之和均减小;
16、第四基础工作模态:控制第一、第二桥臂中点等效占空比,使第一、二绕组的电流之差变化;
17、第五基础工作模态:控制第三、第四桥臂中电等效占空比,使第三、四绕组的电流之差变化;
18、其中,第一、第二桥臂中点等效占空比与第一、第二桥臂中可控开关导通时间占空比一致,第三、第四桥臂中点等效占空比与第三、第四桥臂中可控开关导通时间占空比之和为1。
19、进一步地,所述第四基础工作模态中,包括:
20、控制第一桥臂中点等效占空比高于第二桥臂中点等效占空比,使第一、二绕组的电流之差增大;
21、或控制第一、第二桥臂中点等效占空比相等,使第一、第二绕组的电流之差不变;
22、或控制第一桥臂中点等效占空比低于第二桥臂中点等效占空比,使第一、二绕组的电流之差减小。
23、进一步地,所述第五基础工作模态中,包括:
24、控制第三桥臂中点等效占空比高于第四桥臂中点等效占空比,使第三、四绕组的电流之差减小;
25、或控制第三、第四桥臂中点等效占空比相等,使第三、第四绕组的电流之差不变;
26、或控制第三桥臂中点等效占空比低于第四桥臂中点等效占空比,使第三、四绕组的电流之差增大。
27、进一步地,还包括,控制所述可控开关的导通时间占空比,使所述控制器同时工作在所述五种基础工作模态中的两种或多种,其中,两种或多种基础工作模态之间的控制不冲突。
28、进一步地,所述控制器同时工作在第二基础工作模态和第五基础工作模态;
29、或所述控制器同时工作在第三基础工作模态和第四基础工作模态;
30、或所述控制器同时工作在第四基础工作模态与第五基础工作模态。
31、总体而言,通过本发明所构思的以上技术方案,能够取得以下有益效果:
32、(1)本发明的控制器,根据单向导通器件及可控开关与电源的连接方式,将八个桥臂分为四个正向桥臂和四个反向桥臂,两个正向桥臂和两个反向桥臂作为一组桥臂,每组桥臂中,两个正向桥臂的中点连接第一、第二绕组的第一端,两个反向桥臂的中点连接第三、第四绕组的第二端,第一、第二绕组的第二端并接在一起后连接第五绕组的第一端,第三、第四绕组的第一端并接在一起后连接第五绕组的第二端,通过改变各可控开关的导通时间即可控制与各桥臂连接的各绕组的电流,基于上述第五绕组的连接关系,通过控制流入每组桥臂的电流即可控制每组桥臂中对应的第五个绕组的电流,从而实现对五自由度磁悬浮轴承中10个绕组产生的电磁力的控制。本发明通过将每组桥臂的第五绕组连接在前四个绕组中的每两个绕组之间,相比现有的五自由度磁悬浮轴承控制器,本发明省去了原先用于控制两组绕组中的第五绕组的桥臂,实现了仅需8个桥臂控制10个绕组,大幅缩减了五自由度磁悬浮轴承控制器中电力电子器件的数量,降低五自由度磁悬浮轴承的电力电子控制器的复杂度,同时减小了控制器的体积,实现了成本的降低,具有很好的实际应用价值。
33、(2)进一步地,基于本发明提供的控制器,本发明还提供了该控制器相应的控制方法,通过同时控制每个桥臂上可控开关器件导通时间占空比,使控制器工作在不同的工作模态下,各个模态可以独立工作,也可以相互配合,实现了控制各个绕组的充放电时间与续流时间,从而实现了对各个绕组电流的控制,进而完成了五自由度磁悬浮轴承中电磁力的控制,符合实际应用需求
34、总而言之,本发明的电力电子控制器及控制方法,能够进一步降低磁悬浮轴承控制器中电力电子器件的数目,降低五自由度磁悬浮轴承的电力电子控制器的复杂度,同时减小控制器的体积及成本。
- 还没有人留言评论。精彩留言会获得点赞!