一种针对海上风电直流输电系统的无源鲁棒稳定控制方法
本发明涉及柔性直流系统稳定控制领域,具体是一种针对海上风电直流输电系统的无源鲁棒稳定控制方法。
背景技术:
1、柔性直流输电技术(voltage source converter based high voltage directcurrent transmission,vsc-hvdc)是结合电力电子技术、电力系统、自动控制和通信原理等技术相结合的第三代直流输电系统,与传统直流输电相比的特点是采用了绝缘栅双极晶体管(insulated-gate bipolar transisitor,igbt)等全控型器件代替了晶闸管这种半控型器件,在近年来得到了迅速的发展并应用到具体实际工程之中。柔性直流输电技术的发展对推进电网智能化、新能源并网等具有重要的作用。海上风力发电具有清洁环保、资源稳定性强、年利用小时数高等特点,海上风电经柔性直流并网技术将在未来得到快速发展。但传统的海上风电柔性直流并网系统中的电压源换流器采用基于比例积分的直接电流控制内环和外环控制,它的缺点是参数都是用试凑的方法获得,缺乏理论性,且设计的虽然能保障系统的鲁棒性,但往往会降低系统的稳定时的性能。如果出现功率突然波动等情况出现,就会很大影响系统的动态特性,包括超调量和调整时间等。所以需要研究在外界干扰下如何用新的控制策略来提高针对海上风电直流输电系统的鲁棒稳定性。
2、基于微分几何理论的非线性控制在提高系统动态性能有着不错的表现,已有文献在换流器中使用基于反馈线性化的反推控制方法,但这种控制方法在系统建模误差较大的情况下,会使得系统的鲁棒性出现很大程度地降低。近年来,无源控制理论由于调节灵活、动态响应快、鲁棒性好等优点,被广泛应用在换流器控制设计中,但传统的无源控制方法对系统中的建模误差仍然较为敏感。。
3、现有技术中的一种电压源型换流器接入弱电网时的直流电压鲁棒控制方法及系统(cn202111434555.3),在设计鲁棒控制方式时,未考虑系统建模误差的外界扰动,从而影响模型的准确度。
技术实现思路
1、有鉴于此,本发明提出了一种针对海上风电直流输电系统的无源鲁棒稳定控制方法。首先,基于基尔霍夫电压定律列写海上风电柔性直流并网系统电压源换流器的静止坐标系下的数学模型,再考虑建模误差,并采用等量park变换将该数学模型转化成dq旋转坐标系下的微分方程;其次,通过设定正定的跟踪增益值,保证实时跟踪误差可以在有限时间内趋于0,从而设计出针对综合干扰项的实时跟踪方程,实现对dq旋转坐标系下微分方程中建模误差的准确跟踪;最后,设计基于干扰实时跟踪的海上风电柔性直流并网系统电压源换流器的无源鲁棒控制,通过定义pchd(port-controlled hamiltonian withdissipation)标准模型下的期望能量函数,得到用于提供系统鲁棒稳定性的换流器控制输入,使得系统处于平衡点时的能量取得极小值。
2、本发明的目的至少通过如下技术方案之一实现。
3、一种针对海上风电直流输电系统的无源鲁棒稳定控制方法,包括以下步骤:
4、s1、基于基尔霍夫电压定律得到海上风电柔性直流并网系统中的电压源换流器(vsc)在静止坐标系下的数学模型;
5、s2、考虑建模误差,并采用等量park变换将步骤s1中得到的静止坐标系下的数学模型转化成dq旋转坐标系下的微分方程;
6、s3、通过设定正定的跟踪增益值,保证实时跟踪误差可以在有限时间内趋于0,从而设计出针对综合干扰项的实时跟踪方程,实现对dq旋转坐标系下微分方程中建模误差的准确跟踪;
7、s4、将电压源换流器(vsc)的数学模型推导成pchd(port-controlledhamiltonian with dissipation)标准模型下的微分方程形式;
8、s5、构建pchd标准模型的期望能量函数;
9、s6、根据系统期望能量函数推导用于提供系统鲁棒稳定性的换流器控制输入,使得系统处于平衡点时的能量取得极小值,从而实现基于干扰实时跟踪的海上风电柔性直流并网系统电压源换流器的无源鲁棒控制。
10、进一步地,步骤s1中,基于基尔霍夫电压定律列写海上风电柔性直流并网系统电压源换流器的静止坐标系下的数学模型,具体如下:
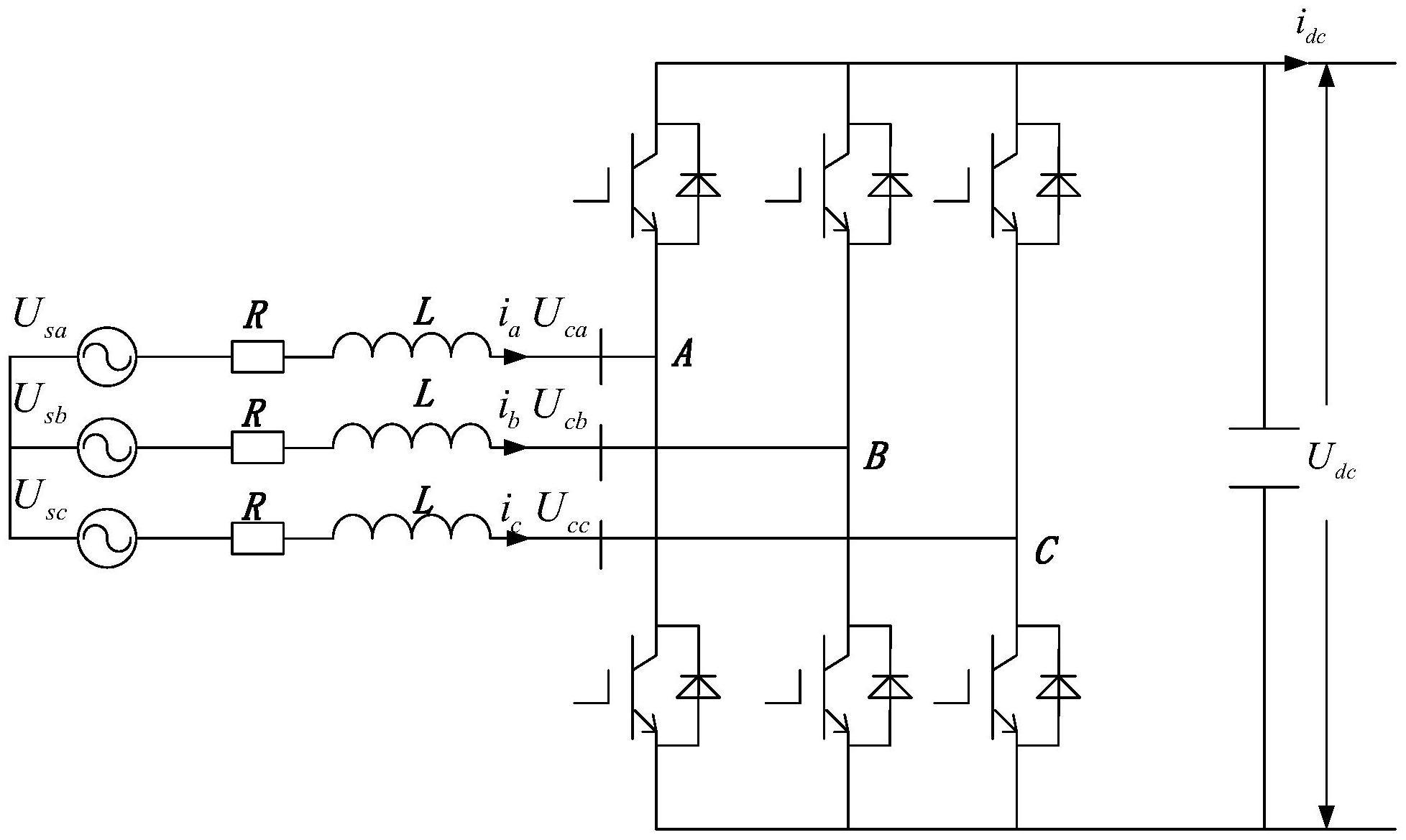
11、对于海上风电柔性直流并网系统中的电压源换流器(vsc),us和is分别为电压源换流器交流侧电压和电流,uc为电压源换流器输出电压;usa、usb、usc分别为us的a、b、c三相瞬时值,ia、ib、ic分别为is的a、b、c三相瞬时值,uca、ucb、ucc分别为uc的a、b、c三相瞬时值;设在电压源换流器(vsc)中三相电压为对称电压,忽略换流器的开关损耗;根据电压源换流器的结构,运用基尔霍夫电压定律可以得出vsc在三相静止坐标系的微分方程如下式:
12、
13、其中,l为换流器的等值电感值,r为换流器的等值电阻。
14、进一步地,步骤s2中,采用等量park变换,将式(1)中的时变交流项转换为恒定直流量,对式(1)进行park变换并改写成矩阵形式,具体如下:
15、
16、其中,usd、usq分别是us在dq坐标系下的d轴、q轴分量,ucd、ucq是分别是uc在dq坐标系下的d轴、q轴分量,id、iq分别是is在dq坐标系下的d轴、q轴分量。
17、进一步地,由于假设三相电压对称,所以park变换后,0轴分量为零;在考虑建模误差和外界扰动因素后,由式(2)得到电压源换流器(vsc)的数学模型的时域表达式为:
18、
19、其中,wd和wq分别为d轴和q轴的系统建模误差综合干扰项,wd和wq的上界均为wmax,且满足以下关系:
20、
21、式中,wd(t)和wq(t)分别表示t时刻d轴和q轴的系统建模误差综合干扰项。
22、进一步地,步骤s3中,通过设定正定的跟踪增益值,保证实时跟踪误差可以在有限时间内趋于0,从而设计出针对综合干扰项的实时跟踪方程,实现对dq旋转坐标系下微分方程中建模误差的准确跟踪,具体如下:
23、根据式(3)的数学模型,形成对综合干扰项w(t)的实时跟踪方程如下式:
24、
25、其中,d轴和q轴的系统建模误差综合干扰项wd和wq的实时跟踪值分别为和d轴和q轴的系统建模误差综合干扰项wd和wq的跟踪增益值分别为kwd与kwq,且kwd>0,kwq>0;实时跟踪方程的中间变量分别为和分别表示d轴和q轴的换流器电流id和iq的中间变量;进一步可得出:
26、
27、在假定干扰是恒定有界的同时设跟踪误差为:
28、
29、式(8)进一步写成:
30、
31、由式(9)计算出ed和eq分别表示d轴和q轴跟踪误差,ed0与eq0分别表示d轴和q轴的跟踪初始误差,因为kwd与kwq均为正数,实时跟踪值为和可以在有限时间内与实际值接近,如果增大kwd与kwq的数值,可以加快实时跟踪值的追踪速度,减小收敛到实际值的时间。
32、进一步地,步骤s4中,将电压源换流器(vsc)的数学模型的时域表达式(3)改写成pchd(port-controlled hamiltonian with dissipation)模型:
33、
34、其中,x、u和y分别表示pchd模型的状态变量、控制输入变量和系统输出量,为状态变量x的导数;在pchd模型中,定义hamiltonian函数h(x)作为能量函数,使得系统输出量y在控制输入变量u下是无源的,从而实现鲁棒稳定运行的目标;推导式(10)中的状态量和控制输入量具体表示为:
35、
36、其中,扰动量包含在控制输入中,即
37、进一步地,pchd模型的hamiltonian函数h(x)表示为:
38、
39、同时,互联矩阵j(x)反映pchd模型内部互联情况,阻尼矩阵反映了pchd模型的耗散性,分别表示为:
40、
41、其中,ω表示基波频率。
42、进一步地,步骤s5中,由于无源控制目标为在控制输入变量u下,pchd标准模型理想的平衡点处应满足渐进稳定,其中平衡点x*定义为:
43、
44、其中,id*、iq*分别表示x1、x2、id、iq的平衡点状态值;
45、构造互联矩阵ja、阻尼矩阵和闭环期望能量函数hd(x):
46、
47、其中,r1和r2分别为人为取值的阻尼矩阵的参数,x*和x分别为期望的状态变量和实际的状态变量。
48、进一步地,使得平衡点处系统能量极小,此时闭环系统可表示为:
49、
50、其中,jd(x)为期望的互联矩阵;为期望的阻尼矩阵;hd(x)为期望的能量函数;
51、其中,jd(x)和满足
52、
53、进一步地,步骤s6中,根据pchd标准模型的期望能量函数推导用于提供系统鲁棒稳定性的换流器控制输入,使得系统处于平衡点时的能量取得极小值,从而实现基于干扰实时跟踪的海上风电柔性直流并网系统电压源换流器的无源鲁棒控制,具体如下:
54、根据系统的期望能量函数,结合pchd标准模型,推导得到:
55、
56、因此可得控制输入变量u为:
57、
58、由于此时海上风电柔性直流并网系统处于平衡点时,海上风电柔性直流并网系统能量取得极小值;因此,闭环系统满足渐近鲁棒稳定性的条件;采用该控制输入u进行对换流器进行控制,从而实现海上风电柔性直流并网系统电压源换流器的无源鲁棒控制,提高海上风电柔性直流并网系统在外界扰动下的稳定运行能力。
59、相比于现有技术,本发明的优点在于:
60、本发明提出了一种针对海上风电直流输电系统的无源鲁棒稳定控制方法,建立了考虑建模误差的系统动态方程,设计了基于干扰实时跟踪的海上风电柔性直流并网系统电压源换流器的无源鲁棒控制,能够显著提高系统在外界扰动下的稳定运行能力。
- 还没有人留言评论。精彩留言会获得点赞!