一种非对称六相电机的零共模电压SVPWM调制方法
本发明属于空间脉冲宽度调制(svpwm)领域,涉及一种非对称六相电机的零共模电压svpwm调制方法。
背景技术:
1、电机驱动系统常用于供暖、通风和升降机等场合。近些年来,越来越多地应用于电动汽车,即交通电气化。国际能源署(iea)的一项研究表明电机驱动系统消耗约占全球电力供应的43%,其中70%属于工业应用,并预测电机能耗稳步增长,且全球电动机市场在未来几年将会继续增长。因此,电机驱动系统的可靠性极为重要。
2、研究表明,电机故障中有40%至70%是由轴承损坏引起[1]。轴承损坏不仅会导致驱动系统效率持续下降,还会导致高昂的维修成本,降低了系统的可靠性。在基于pwm逆变器驱动电机中,轴承损坏通常是由pwm产生的共模电压造成。轴承各个部件之间都存在寄生电容,当轴承滚珠的润滑油膜未损坏时,可看成一个绝缘体,在轴承中形成一个寄生电容。由于定子绕组和转子之间的寄生电容、转子和定子间的寄生电容和轴承内部的电容形成了电容分压器。高频共模电压在轴承上产生电压,从而产生了容性电流。通常,容性电流的幅值并不大,约为5ma至0.2a[2]。当高频共模电压在轴承上产生的感应电压超过轴承润滑剂的介电强度后,油膜被击穿,轴承相当于导体,转子轴和定子机壳之间发生放电,产生放电电流。导致轴承出现点蚀、凹槽等。电机接线处的电压变化会引起电流,该电流在定子机壳、轴承和转子轴之间循环。如果这个电流足够大,破坏了轴承润滑油膜的绝缘性,则形成了循环电流[3]。如果转子通过负载接地,总接地电流的一部分可以通过转子和轴承接地,形成转子对地电流。如果电机的尺寸较大,则转子对地的电流就会较大,轴承的寿命会明显减少。另外,共模电压还会引起电磁干扰(emi)和损坏导线的绝缘层。由于电机各个部件之间存在内在的寄生阻抗,在逆变器生成的高频共模电压作用下,会产生传导和辐射emi[4]。从而对驱动系统的其他子系统造成影响。为降低emi的影响,通常可采用低阻抗电缆和相同长度的双绞线连接电缆[5]。如果能消除共模电压,则从根源上解决这一问题。由于共模电压的dv/dt数值很大,导致绕组导线的绝缘层承受很大的电流应力[6]。如果逆变器和电机之间距离较远,用较长的导线连接,则导线绝缘层更容易被损坏。
3、近些年,非对称六相电机的svpwm技术得到了快速发展[7]。对于共模电压的抑制或者消除,既可以通过改变调制策略实现,也可以通过改变硬件实现(如改变逆变器拓扑)。然而,改变硬件通常会增加成本,且使系统更加复杂。本发明是通过改变调制策略实现总共模电压完全消除。文献[8]提出了一种相移spwm(ps-spwm-1)的共模电压抑制策略。该策略使用六个三角形载波,这六个载波相互偏移1/6个载波周期。文献[9]提出了ps-spwm-2和基于锯齿载波的spwm(sc-spwm)策略。策略ps-spwm-2使用两个相反的三角形作为载波,一个三角形载波用作一套三相绕组的载波,另一个三角形载波用作另一套三相绕组的载波。策略sc-spwm采用两种锯齿波作为载波,与ps-spwm-2类似,一个锯齿波用作一套三相绕组的载波,另一个锯齿波用作另一套绕组的载波。这三种策略的调制波均为正弦波。对于ps-spwm-1(高调制区)、ps-spwm-2和sc-spwm,由于每套三相绕组中都存在零矢量(000)和零矢量(111),因此这三种策略的子共模电压峰值均为±udc/2。由于消除了六相开关态(000000)和(111111),这三种方法的总共模电压峰值均从±udc/2降低为±udc/6。然而,这三种方法都没有消除总共模电压。文献[10]提出了zcmv策略,该策略通过六相正弦调制波计算得到各相的占空比,通过平移各相绕组导通时刻,使得一套绕组的每一相导通时刻与另一套绕组的某一相关断时刻相同,从而使总共模电压始终为零。然而,该方法的线电压存在较大的五次和七次谐波。基于zcmv,文献[11]将调制范围从[0,1]扩展到[0,1.273],但在扩展后的区域内总共模电压无法消除。
4、因此,为使非对称六相电机总共模电压为零,且线电压不含五次、七次等低次谐波,迫切需要新的共模电压抑制技术。
5、参考文献
6、[1]plazenet t,boileau t,caironi c,nahid-mobarakeh b.acomprehensivestudy on shaft voltages and bearing currents in rotating machines.ieee transind appl,2018,54(4):3749-3759.
7、[2]muetze a.bearing currents in inverter-fed ac-motors[ph.d.thesis],der technischen universitaet darmstadt;2004.
8、[3]muetze a,binder a.calculation of circulating bearing currents inmachines of inverter-based drive systems.ieee trans ind electron,2007,54(2):932-938.
9、[4]han d,morris ct,sarlioglu b.common-mode voltage cancellation inpwm motor drives with balanced inverter topology.ieee trans ind electron,2017,64(4):2683–2688.
10、[5]shin d,jeong s,baek y,park c,park g,kim j.a balanced feed forwardcurrent sense current-compensation active emi filter for common-mode noisereduction.ieee trans electromagn compat,2019,florence,italy,1-12.
11、[6]lee s-h,jung j-h,hwnag s-i,kim j-m,cho h.common mode voltagereduction method for h7 inverter using dpwm offset based modulationtechnique.ieee energy conversion congress and exposition(ecce),sept.2018,portland,or,usa,1790-1795.
12、[7]khoudir marouan,et al.a new pwm strategy based on a 24-sectorvector space decomposition for asix-phase vsi-fed dual stator inductionmotor.ieee trans.ind.electron.,2008,55(5),1910-1920.
13、[8]liu,z.;zheng,z.;scott,d.s.;gu,c.;li,y.reduction of common-modevoltage in multiphase two-level inverters using spwm with phase-shiftedcarriers.ieee trans.power electron.2016,31,6631–6645.
14、[9]liu,z.;zheng,z.;peng,z.;li,y.;hao,l.a sawtooth carrier-based pwmfor asymmetrical six-phase inverters with improved common-mode voltageperformance.ieee trans.power electron.2018,33,9444–9458.
15、[10]shen,z.;jiang,d.;liu,z.;ye,d.;li,j.common-mode voltageelimination for dual two-level inverter-fed asymmetrical six-phase pmsm.ieeetrans.power electron.2020,35,3828–3840.
16、[11]yang huang,et al.a novel zero/reduced common-mode voltagemodulation scheme for a dual three-phase motor drive system in fullmodulation span.ieee trans.power electron.,2022,37(6),6765-6779.
技术实现思路
1、本发明中提到的非对称六相电机是指六相电机绕组为星形连接,两套三相绕组相互偏移30°,两套三相绕组形成的两个中性点相互隔离,且针对的驱动系统为两电平六相逆变器驱动非对称六相电机。本发明所要解决的技术问题是:提出一种非对称六相电机的零共模电压svpwm调制方法,该方法理论上能完全消除总共模电压,且能使五次、七次等低次谐波电压为零。从而避免电机轴承因共模电压而被点蚀损坏,延长电机轴承寿命,提高电机系统的可靠性。另外,所提方法还具有计算量小,便于dsp实施等优点。
2、为了解决上述技术问题,本发明采用的技术方案为:
3、对于电机绕组为星型连接的逆变器驱动系统,共模电压通常是指参考接地点和电机绕组中性点之间的电压。非对称六相电机的共模电压可以分为子共模电压和总共模电压。直流母线中点o通常选为接地点,六相电机两套绕组的中性点分别为点n和n’,o点与这两个中性点之间的电压von和von’称为子共模电压。
4、两个子共模电压von和von’的定义可以表示为:
5、
6、
7、其中,vao、vbo、vco、vuo、vvo和vwo是逆变器六条支路的桥臂电压;sj=1(j=a,b...w)表示j相上支路的导通,sj=0(j=a,b...w)表示j相上支路的关断。一般来说,总共模电压vcm可以定义为
8、
9、由上式可知,每套三相绕组产生的子共模电压的所有可能值为±udc/6和±udc/2,六相绕组产生的总共模电压的所有可能值是±udc/2、±udc/3、±udc/6和0。
10、非对称六相电机共有64个电压矢量,其中有20个电压矢量形成的两个子共模电压数值相反,大小相等,因此产生的总共模电压vcm为零。例如,矢量v41对应的二进制数为“101001”,则由上述公式知,子共模电压von=udc/6,von’=-udc/6,因此总共模电压vcm=0。本发明是根据指令电压矢量vr所在扇区,选择这20个电压矢量中的四个非零电压矢量和一个零电压矢量合成vr,从而所得总共模电压为零。
11、本发明所提出的一种非对称六相电机的零共模电压svpwm调制方法,包括以下步骤:
12、(1)从64个电压矢量中选择20个特殊电压矢量,这些电压矢量产生的总共模电压为零;
13、(2)将基波平面划分成12个扇区;
14、(3)判断指令电压vr的调制度是否小于或等于0.913;若小于或者等于,则进行第(4)步;若大于,则程序结束;
15、(4)计算各电压矢量的作用时间;
16、(5)生成各相的开关pwm信号,以驱动功率板;
17、(6)在下一个离散时刻,重复步骤(3)至(5)。
18、进一步,步骤(1)中,从64个电压矢量中选择20个特殊电压矢量,这些电压矢量产生的总共模电压为零,具体过程如下:对于非对称六相电机共模电压包含两个子共模电压(von和von’)和一个总共模电压(vcm),经过矢量空间解耦变换后,64个电压矢量中,有20个电压矢量的两个子共模电压数值相反,从而形成的总共模电压为零,这20个电压矢量如表1所示。
19、表1总共模电压为零的电压矢量
20、
21、进一步,步骤(2)中,将基波平面划分成12个扇区,具体过程如下:在静止坐标系的基波平面上,指令电压vr的相位θ在(-15°,15°)之间时,该区域属于第ⅰ扇区;将该区域逆时针旋转30°,形成第ⅱ扇区,依次类推,直到第ⅻ扇区,如表2所示。
22、表2每个扇区对应的角度范围
23、
24、进一步,步骤(3)判断指令电压vr的调制度是否小于或等于0.913;若小于或者等于,则进行第(4)步;若大于,则程序结束;具体过程如下:本发明所提方法的最大线性调制度为0.913,若指令电压vr的调制度小于或等于0.913,则属于线性调制范围,则进行第(4)步;若大于,则属于非线性调制范围,程序结束。
25、其中,指令电压vr调制度的计算过程如下:在开环控制中,六相调制信号va、vb、vc、vu、vv和vw经过矢量空间解耦坐标变换法,可以得到vsα和vsβ,即:
26、
27、在闭环控制中,d轴和q轴电压usd和usq经过park逆变换,可以得到vsα和vsβ,即:
28、
29、指令电压vr幅值计算公式为本发明中调制度m的定义为:
30、
31、由此可得出调制度m的数值。
32、以第ⅰ扇区为例,说明所提方法的最大线性调制度计算过程。当vr位于第ⅰ扇区时,由伏秒平衡法则知:
33、
34、将各电压矢量幅值带入上式,进一步运算可得:
35、
36、为使xy平面上合成的电压矢量为零,令则可得到各个电压矢量的作用时间。
37、
38、其中,零矢量的作用时间为:
39、t0=ts-(t41+t13+t11+t25)
40、其中,
41、
42、因此,零矢量的作用时间为
43、
44、其中,
45、
46、由调制度m的定义知:
47、
48、在最大线性调制度时,零矢量的作用时间为零,即
49、
50、由此可得:
51、
52、由三角函数知识可知,最大调制度mmax=0.913。如果计算所得m,小于或者等于0.913,则进行第四步;如果大于0.913,则超出线性调制范围,程序终止。
53、进一步,步骤(4)中,计算各电压矢量的作用时间,具体过程如下:指令电压vr在每个扇区都由4个非零电压矢量和1个零电压矢量合成,如表3所示。先计算指令电压vr的相位角θ,再根据表2确定vr所在扇区,从而选择表3中相应的电压矢量,按照伏秒平衡法则,列出相应的等式,经求解可得这些电压矢量的作用时间。零矢量的作用时间为采样周期减去这四个非零电压矢量的作用时间之和。
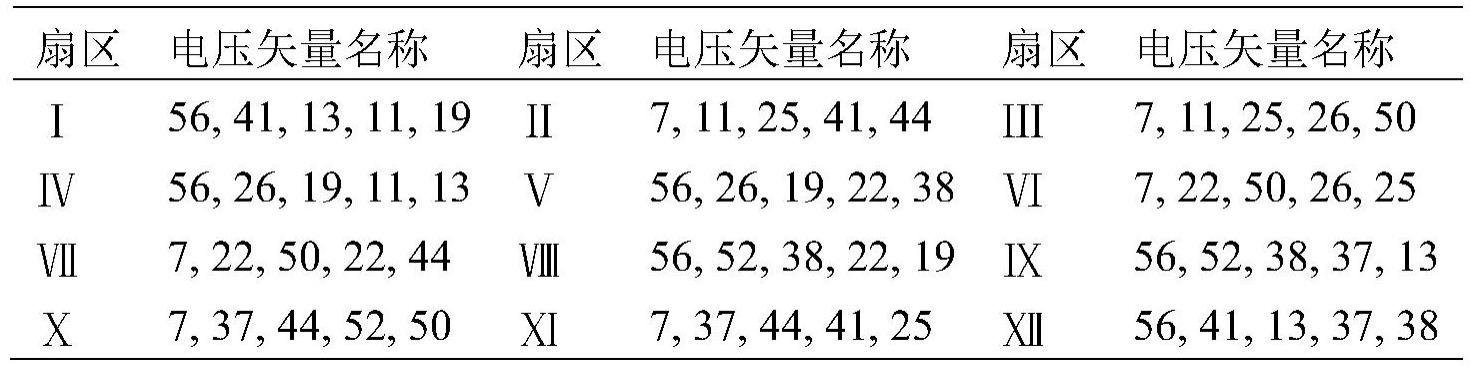
54、表3所提方法在各个扇区对应的电压矢量
55、
56、指令电压vr相位角θ的计算过程如下:在静止坐标系基波平面上因此指令电压vr的相位θ的计算公式为:
57、
58、进一步,步骤(5)中,生成各相的开关pwm信号,以驱动功率板;具体过程如下:由表3可知每个扇区由4个非零电压矢量和1个零电压矢量合成指令电压矢量vr,然而这些矢量的排列次序有很多种,本发明综合考虑了线电压半波对称特性和开关次数最小原则,给出了每个扇区电压矢量的排列次序,如表4所示,其中零矢量两次的作用时间相同。该表的电压矢量用十进制数表示,将十进制数转化为二进制数,且“0”表示低电平,“1”表示高电平。从而得到电机六相绕组的pwm信号。例如,电压矢量编号“41”对应的二进制数为“101 001”,这些二进制数对应为“sasbscsusvsw”,其中“sa=0”表示a相逆变器上支路关闭,“sa=1”表示a相逆变器上支路导通,其余参数类似。
59、表4所提方法在各个扇区的开关次序
60、
61、进一步,步骤(6)中,在下一个离散时刻,重复步骤(3)至(5),具体过程如下:电机驱动系统为离散系统,在下一个时刻,重复步骤(3)至(5)。
- 还没有人留言评论。精彩留言会获得点赞!