一种基于视觉定位的水下机器人无线充电系统及方法
本发明涉及水下机器人充电,具体涉及一种基于视觉定位的水下机器人无线充电系统及方法。
背景技术:
1、使用长航时潜航器可收集到更多水面舰艇或潜艇无法采集到的环境数据。目前,潜航器充电需要上浮至附近邻近的舰船或陆上基地,传统的电能补给方式主要有两种,一种是将水下设备打捞上岸,更换新电池或采用有线方式给电池充电;另一种是在船舶、海底基站等供电平台通过电缆系统向水下设备进行水下湿插拔式充电。第一种方式需要人工操作,自动化程度低,充电隐蔽性差,易造成水下军事设备暴露目标;湿插拔方式操作维护过程复杂,成本昂贵,由于插拔力较大,导致接口磨损严重,易产生漏电事故,可靠性和安全性不高。
2、传统的电能补给方式限制了水下设备的续航力和执行任务能力,无线电能传输技术打破了传统有线电能传输的固有格局摆脱了冗杂电线的束缚,使得供电电源和充电设备完全隔离,供电电路和充电电路实现独立封装,较好地解决了有线电能传输存在的电线裸露、易产生接触火花、可移动性差等问题。对于无缆供电水下机器人,因为自带的储能模块能量有限,一般无法进行长时间水下作业。为了提高水下机器人的工作效率和作业范围,需要研究水下机器人的水下对接和无线充电技术。
3、对于水下航行器来说,识别正确泊位和测量距离十分重要。与传统的光学传感设备不同,水下机器人的光视觉系统不仅需要具有获取光学图像和视频信息的能力,而且应该具备对图像和视频信息进行处理、特征提取以及分类识别的功能。
4、但是,现有技术对于水下机器人的充电对接的成功率和效率不高,有的对硬件的要求又过高,不易实现水下机器人的可靠充电。
技术实现思路
1、为此,本发明提出一种基于视觉定位的水下机器人无线充电系统及方法,以解决上述问题。
2、根据本发明的一方面,提供一种基于视觉定位的水下机器人无线充电系统,该系统包括水下无线充电装置和水下机器人;其中,
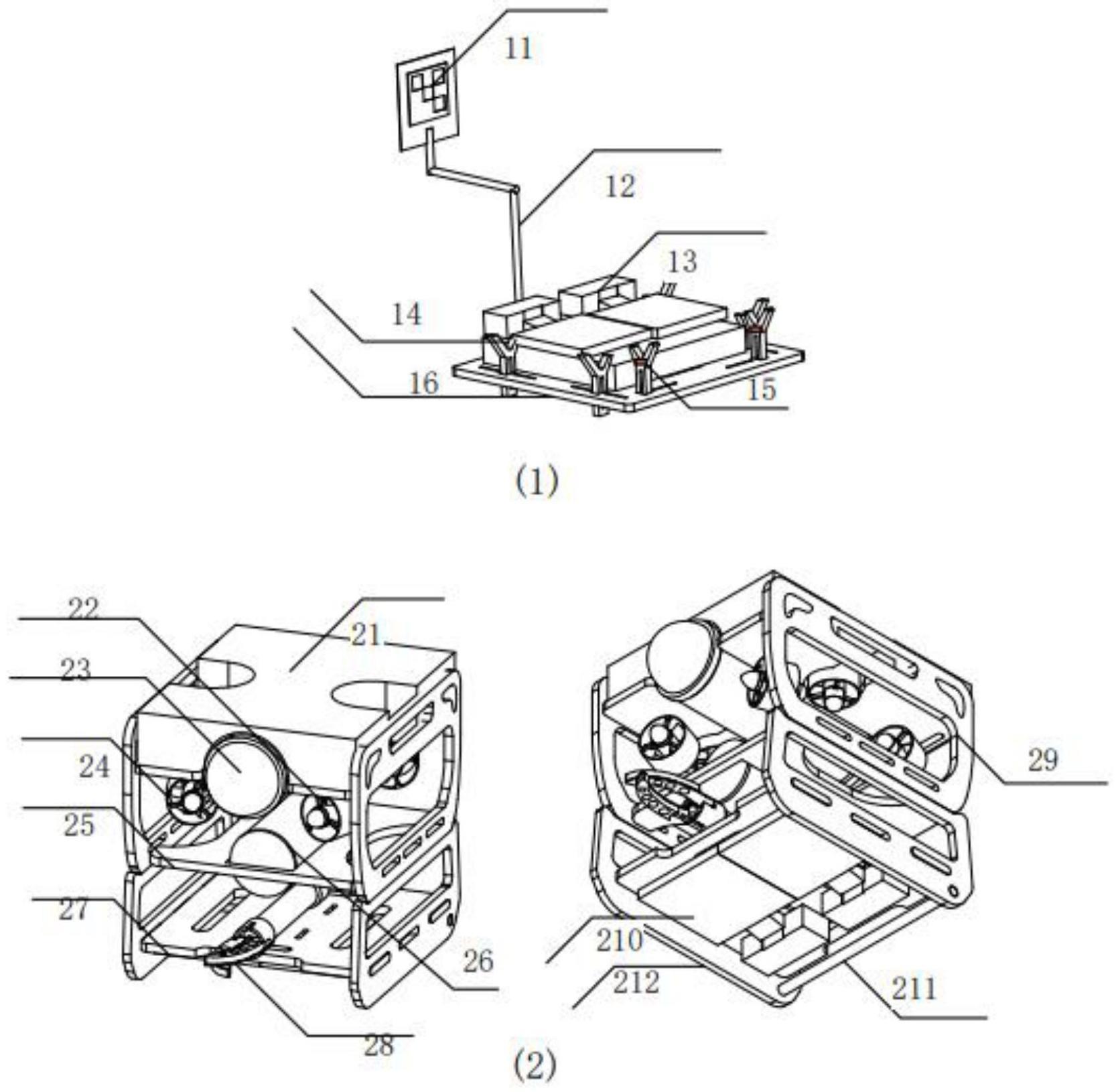
3、水下无线充电装置包括定位aruco二维码、竖直定位杆、无线充电发射模块、六个支撑固定“y”形架、矩形底板;其中,所述定位aruco二维码与所述竖直定位杆连接;所述竖直定位杆竖直固定放置在所述矩形底板长边一侧;所述无线充电发射模块固定放置在所述矩形底板上;所述矩形底板的每个短边固定放置两个支撑固定“y”形架,远离竖直定位杆的矩形底板另一长边固定放置两个支撑固定“y”形架;
4、所述水下机器人的框架为由三层横板、左右两个上侧板、左右两个下侧板组成的“曰”型框架,所述上侧板和所述下侧板固定连接,所述三层横板包括第一层板、第二层板、第三层板,第一层板、第二层板用于连接左右两个上侧板,第三层板用于连接左右两个下侧板;
5、所述水下机器人的框架内包括浮力块、电子仓、推进器、无线充电接收模块;其中,所述浮力块放置于第一层板上方,所述电子仓嵌入第一层板中间,中心线与第一层板平齐;所述推进器用于为水下机器人运动提供动力;所述无线充电接收模块放置于第三层板下面;
6、对接时,所述矩形底板短边的四个支撑固定“y”形架与两个下侧板配合以保证水下机器人的横向稳定;对接后,无线充电发射模块和无线充电接收模块无线连接以对水下机器人进行充电。
7、进一步地,所述水下机器人的框架内还包括水平金属定位杆,所述水平金属定位杆连接于左右两个第三层板之间。
8、进一步地,所述水下无线充电装置还包括两个永磁铁,两个永磁铁分别放置于矩形底板另一长边的两个支撑固定“y”形架上,用于在对接时对水平金属定位杆进行吸附固定以保证水下机器人的纵向稳定。
9、进一步地,所述水下机器人的框架内还包括机械爪,所述机械爪放置于第三层板上面,用于在对接时夹紧所述竖直定位杆以保证水下机器人的竖直方向稳定。
10、进一步地,所述电子仓内放置摄像头、无线传输模块和控制器;其中,摄像头和无线传输模块连接,控制器分别与无线传输模块和推进器连接。
11、进一步地,所述水下机器人的框架内还包括电池仓,所述电池仓嵌入第二层板中间,中心线与第二层板平齐,用于为电子仓、推进器和机械爪供电。
12、进一步地,所述推进器包括六个,四个分别放置在第一层板下表面的四角,两个放置在第一层板中间。
13、根据本发明的另一方面,提供一种基于视觉定位的水下机器人无线充电方法,所述方法基于所述水下机器人无线充电系统实现,所述水下机器人无线充电系统包括水下无线充电装置和水下机器人;其中,所述水下无线充电装置包括定位aruco二维码、无线充电发射模块;所述水下机器人包括电子仓、无线充电接收模块,所述电子仓内放置摄像头、无线传输模块和控制器;
14、所述方法包括以下步骤:
15、步骤一、获取水下无线充电装置的位置;
16、步骤二、使得水下机器人移动靠近水下无线充电装置,当水下机器人电子仓内搭载的摄像头采集的图像中包含aruco二维码时停止移动;
17、步骤三、对包含aruco二维码的图像进行处理,获取水下机器人相对于水下无线充电装置的位置坐标和姿态角;具体包括:以水下无线充电装置上的定位aruco二维码中心为坐标原点,xw轴在aruco二维码平面内水平向右,yw轴在aruco二维码平面内竖直向上,按照右手定则建立zw轴,建立坐标系ow-xwywzw;以摄像头光心为相机坐标系原点,建立相机坐标系oc-xcyczc;利用pnp算法,求解坐标系ow-xwywzw到相机坐标系oc-xcyczc的旋转矩阵和平移矩阵,进而获取水下机器人相对于水下无线充电装置的位置坐标和姿态角,所述姿态角包括偏航角、滚动角、俯仰角;
18、步骤四、将所述水下机器人的位置调整为第一位置、姿态调整为第一姿态;其中,第一位置为:摄像头光心坐标oc在坐标系ow-ywzw平面内,即oc到yw轴的垂线与ow-ywzw平面夹角为0度;oc到xw轴垂线与平面ow-xwzw夹角在10-30度之间;第一姿态为:俯仰角为180°,偏航角为0°,滚动角为0°;
19、步骤五、使得水下机器人向水下无线充电装置以平行于zw轴的方向前进,当水下机器人与水下无线充电装置相对距离的zw轴分量达到预设距离阈值时,使水下机器人竖直下落,oc到xw轴垂线与平面ow-xwzw夹角不断减小,zc轴和zw轴刚好重合即oc到xw轴垂线与平面ow-xwzw夹角为0度时,水下机器人和水下无线充电装置对接完成,进行充电。
20、进一步地,步骤五中oc到xw轴垂线与平面ow-xwzw夹角不断减小,在减小过程中判断oc到xw轴垂线与平面ow-xwzw夹角是否超过60度,若判断为是,则使水下机器人竖直下落直至oc到xw轴垂线与平面ow-xwzw夹角小于60度,再次水平前进或后退;使水下机器人在距离水下无线充电装置水平预定距离。
21、进一步地,利用水下无线充电装置的输出功率是否正常来验证水下无线充电装置和水下机器人是否对接完成。
22、本发明的有益技术效果是:
23、本发明提出一种基于视觉定位的水下机器人无线充电系统及方法,有效提高了水下机器人和水下无线充电装置对接的成功率和效率,实现方式简单,计算量小,实现了水下机器人的可靠充电。
24、本发明使用了视觉定位的方式来辅助水下机器人与水下无线充电装置对接,提高了水下机器人和水下无线充电装置对接的成功率和效率,从而进行稳定的无线充电,提高水下机器人的续航能力和工作范围。
- 还没有人留言评论。精彩留言会获得点赞!