电机位置传感器的容错控制方法、飞行汽车和存储介质与流程
本发明涉及飞行汽车,尤其涉及一种电机位置传感器的容错控制方法、飞行汽车和存储介质。
背景技术:
1、永磁同步电动机基于其结构简单、功率密度高、性能可靠、运行效率高,在新能源汽车中得到了越来越广泛地应用。永磁同步电动机的位置信号一般通过位置传感器(旋转变压器)读取得到,作为电机控制器的重要控制参数。然而旋转变压器工作环境复杂,尤其在高压系统的使用,增加了工作环境的复杂度。若旋转变压器及其解码芯片的采样出现较大误差或者其硬件本身出现故障,则无法读取电动机的位置信号和/或转速等,如此,电机控制器无法获取位置信号和/或转速等重要控制参数,进而导致电驱系统无法正常工作,导致安全隐患。因此,需要采取旋转变压器故障容错控制,保证装置的电驱系统在旋转变压器及其解码芯片出现故障时,不会失控,避免造成更加严重的后果。
2、目前,旋转变压器故障容错控制包括采用基于无位置传感器的控制策略,该方法通过控制系统中的电压和电流,估算电机此时的位置信号和转速信号,在出现旋转变压器故障时,取代硬件采样得到的电机角度和转速信号,满足电驱系统地控制需求。应用在车辆时,该容错控制方法可以使得旋转变压器故障时车辆能够正常行驶,留有足够的时间余量,将车辆行驶到安全区域或者维修店进行维修。然而无位置传感器的控制策略,估算的位置和转速的准确度不够高,进而影响电机的无位置传感器控制效果。
技术实现思路
1、本发明的主要目的在于提供一种电机位置传感器的容错控制方法、飞行汽车和存储介质,旨在使得电机位置传感器的容错控制效果更佳,从而提高旋转变压器容错控制的性能。
2、为了实现上述目的,本发明提供一种电机位置传感器的容错控制方法,所述电机位置传感器的容错控制方法包括以下步骤:
3、电机工作过程中,获取所述电机的旋转变压器的状态信息;
4、根据所述状态信息确定所述旋转变压器故障时,将所述电机的第一初始位置作为预设磁链观测器中的磁链初始位置,所述第一初始位置为所述电机启动所述工作时,所述旋转变压器正常状态下获取到的转子初始位置;
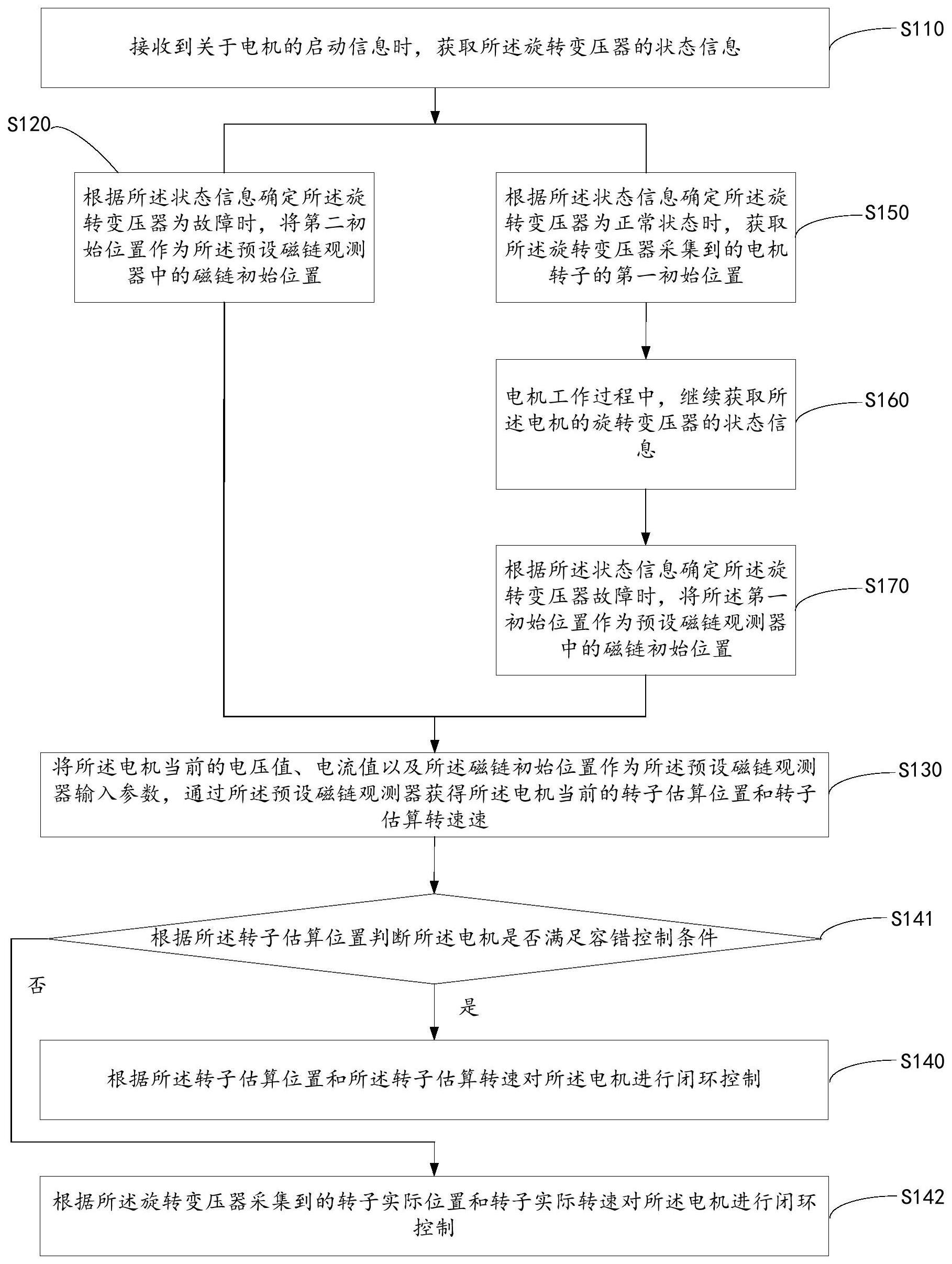
5、将所述电机当前的电压值、电流值以及所述磁链初始位置作为所述预设磁链观测器输入参数,通过所述预设磁链观测器获得所述电机当前的转子估算位置和转子估算转速;
6、根据所述转子估算位置和所述转子估算转速对所述电机进行闭环控制。
7、可选地,所述控制方法还包括:
8、接收到关于所述电机的启动信息时,获取所述旋转变压器的状态信息;
9、根据所述状态信息确定所述旋转变压器为故障时,将第二初始位置作为所述预设磁链观测器中的磁链初始位置,并且执行所述将所述电机当前的电压值、电流值以及所述磁链初始位置作为所述预设磁链观测器输入参数,通过所述预设磁链观测器获得所述电机当前的转子估算位置和转子估算转转速的步骤,所述第二初始位置与所述第一初始位置的获取方式不同;
10、根据所述状态信息确定所述旋转变压器为正常状态时,获取所述旋转变压器采集到的电机转子的第一初始位置,并在获取到所述第一初始位置后,执行所述电机工作过程中,获取所述电机的旋转变压器的状态信息的步骤。
11、可选地,所述控制方法包括:
12、通过高频注入算法估算所述电机转子的第二初始位置。
13、可选地,所述将所述电机当前的电压值、电流值以及所述磁链初始位置作为所述预设磁链观测器输入参数,通过所述预设磁链观测器获得所述电机当前的转子估算位置和转子估算转速的步骤之后,还包括:
14、根据所述转子估算位置确定所述电机满足容错控制条件时,执行所述根据所述转子估算位置和所述转子估算转速对所述电机进行闭环控制的步骤;
15、根据所述转子估算位置确定所述电机不满足容错控制条件时,则根据所述旋转变压器采集到的转子实际位置和转子实际转速对所述电机进行闭环控制。
16、可选地,所述控制方法还包括:
17、将所述转子估算位置与上一时刻估算到的转子估算位置进行比较,获得两个时刻的转子估算位置的位置差;
18、在所述位置差小于或等于预设阈值,则判定所述电机满足容错控制条件;
19、在所述位置差大于所述预设阈值,且确定所述旋转变压器的故障时长小于或等于预设时长时,则返回执行所述将所述电机的电压值、电流值以及所述磁链初始位置作为所述预设磁链观测器输入参数,通过所述预设磁链观测器获得所述电机的转子估算位置和转子估算转速的步骤,以重新获得转子估算位置;
20、在所述位置差值大于所述预设阈值,且所述故障时长大于所述预设时长时,则判定所述电机不满足容错控制条件。
21、可选地,所述通过所述预设磁链观测器获得所述电机当前的转子估算位置和转子估算转速的步骤包括:
22、根据所述电压值、所述电流值以及预设磁链估算模型确定静止坐标下的电机总磁链在alpha轴的磁链分量和beta轴的磁链分量;
23、将alpha轴的磁链分量和beta轴的磁链分量,通过锁相环,获得所述转子估算位置以及所述转子估算转速。
24、可选地,所述将alpha轴的磁链分量和beta轴的磁链分量,通过锁相环,获得所述转子估算位置以及所述转子估算转速的步骤包括:
25、通过外差法对在alpha轴的磁链分量、beta轴的磁链分量、所述电机的定子电感进行计算,估算转子的误差角度;
26、通过pi控制器对所述误差角度进行处理,计算得到所述转子的电角速度;
27、根据所述磁链初始位置和所述电角速度的积分,获得所述转子估算位置;
28、根据所述电角度信号以及电机极对数确定所述转子估算转速。
29、可选地,所述预设磁链估算模型为:
30、
31、
32、phifalpha_est=phialpha_est-lq*;
33、phifbeta_est=phibeta_est-lq*;
34、其中,t0时刻的磁链初值为所述磁链初始位置;phialpha_est是电机等效磁链在alpha坐标轴上的分量;phibeta_est是电机等效磁链在beta坐标轴上的分量;phifalpha_est是电机总磁链在alpha坐标轴上的分量;phifbeta_est是电机总磁链在beta坐标轴上的分量;rs是电机定子电阻,lq是电机定子电感。
35、本发明还提供一种飞行汽车,所述飞行汽车包括:存储器、处理器、电机以及存储在所述存储器并可在所述处理器上运行的位置传感器容错控制程序,所述处理器用于控制所述电机,所述位置传感器容错控制程序被所述处理器执行时实现如上所述的电机位置传感器的容错控制方法的步骤。
36、本发明还提供一种计算机可读存储介质,所述计算机可读存储介质存储有位置传感器容错控制程序,所述位置传感器容错控制程序被处理器执行时实现如上所述的电机位置传感器的容错控制方法的步骤。
37、为实现上述目的,本发明提供一种电机位置传感器的容错控制方法、飞行汽车和存储介质,本实施例中,旋转变压器故障的场景不同,配置不同的磁链初始位置,然后预设磁链观测器根据不同的磁链初始位置来估算电机当前的转子估算位置和转子估算转速,进而对电机进行闭环控制;对于旋转变压器在电机工作过程中突然故障的场景中,将旋转变压器在未故障之前检测到的电机启动时的转子初始位置作为所述磁链初始位置,基于该磁链初始位置是旋转变压器实际采集到的,相对于估算的初始值,准确度更高,使得磁链观测器的控制效果更佳,进而提升旋转变压器容错控制的性能。
- 还没有人留言评论。精彩留言会获得点赞!