一种振动马达及电子设备的制作方法
1.本技术涉及马达技术领域,尤其涉及一种振动马达及电子设备。
背景技术:
2.便携式消费性电子产品,如手机、掌上游戏机等等,一般会用到振动马达来做系统反馈,比如手机的来电提示、游戏机的振动反馈等等。线性振动马达即为常用的一种振动马达。线性振动马达振子的驱动力直接影响振动马达的振动效果。
技术实现要素:
3.根据本技术实施例的第一方面,提供一种振动马达,所述振动马达包括定子和能够相对于所述定子振动的振子,所述振子包括第一磁钢组件,所述第一磁钢组件位于所述定子的垂直于所述振子振动方向的一侧,在所述第一磁钢组件和所述定子的配合下,所述振子能够受到所述定子的电磁力和安培力的反作用力以实现往复振动。
4.在一些实施例中,所述振子还包括第二磁钢组件,所述第二磁钢组件与所述第一磁钢组件对称设于所述定子的两侧。
5.在一些实施例中,所述第一磁钢组件包括第一磁钢、第二磁钢及第三磁钢,其中,所述第一磁钢与所述定子正对设置,第二磁钢、第三磁钢分别设于所述第一磁钢沿振子振动方向的两端,所述第一磁钢沿垂直于所述振子振动的方向充磁,所述第二磁钢的充磁方向和第三磁钢的充磁方向均与所述第一磁钢的充磁方向相反;
6.所述第二磁钢组件包括与所述第一磁钢对称的第四磁钢、与所述第二磁钢对称的第五磁钢及与所述第三磁钢对称的第六磁钢;其中,所述第四磁钢的充磁方向与所述第一磁钢的充磁方向相反,所述第五磁钢的充磁方向和所述第六磁钢的充磁方向均与所述第一磁钢的充磁方向相同。
7.在一些实施例中,所述振动马达包括底板,所述定子固定于所述底板,所述定子包括固定于所述底板的绕线支架及绕设于所述绕线支架的线圈。
8.在一些实施例中,所述第一磁钢沿所述振子振动方向的尺寸大于或等于所述线圈沿所述振子振动方向的尺寸,所述第四磁钢沿所述振子振动方向的尺寸大于或等于所述线圈沿所述振子振动方向的尺寸。
9.在一些实施例中,所述第二磁钢、所述第三磁钢分别通过粘结层与所述第一磁钢粘结于一起,所述第五磁钢、所述第六磁钢分别通过粘结层与所述第四磁钢粘结于一起。
10.在一些实施例中,所述振子还包括质量块,所述质量块的中部具有贯穿所述质量块上下表面的容设空间,所述定子设于所述容设空间内,所述第一磁钢组件和所述第二磁钢组件位于所述容设空间内并固定于所述质量块。
11.在一些实施例中,所述振动马达包括第一隔磁片和第二隔磁片,所述第一隔磁片设于所述第一磁钢组件与所述质量块之间,所述第二隔磁片设于所述第二磁钢组件与所述质量块之间。
12.在一些实施例中,所述振动马达包括底板,所述振动马达包括弹性组件,所述振子通过所述弹性组件连接于所述底板。
13.在一些实施例中,所述弹性组件包括第一弹性支架和第二弹性支架,所述第一弹性支架和所述第二弹性支架设于所述质量块的沿所述振子的振动方向的两端。
14.根据本技术实施例的第二方面,提供一种电子设备,所述电子设备包括如上所述的振动马达。
15.由上述实施例可知,本技术所述的振动马达及电子设备,在工作时振子能够同时受到定子的电磁力和定子的安培力的反作用力的电磁力,有利于提高振子振动的驱动力,并且第一磁钢组件设于所述定子的垂直于所述振子振动方向的一侧,还能够很好地保证其他结构的尺寸。
附图说明
16.为了更清楚地说明本技术实施例或相关技术中的技术方案,下面将对实施例或相关技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1是根据一示例性实施例示出的一种振动马达的立体分解图;
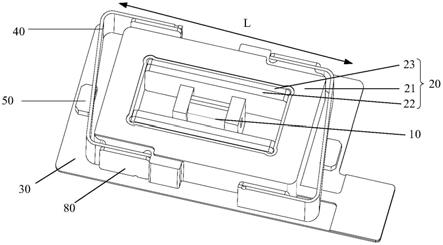
18.图2是根据一示例性实施例示出的一种振动马达的部分组装结构图;
19.图3是根据一示例性实施例示出的一种振动马达的振动原理示意图。
具体实施方式
20.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本技术的一些方面相一致的装置和方法的例子。
21.在本公开使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本公开。在本公开和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
22.应当理解,取决于语境,如在此所使用的词语“如果”可以被解释成为“在
……
时”或“当
……
时”或“响应于确定”。
23.目前,线性振动马达主要有两种。其中一种是在振子上设置位于定子侧方的磁性件,单纯靠该磁性件所受到的定子的安培力的反作用力来驱动振子振动。而这种马达,驱动力较小。另一种是除了在定子的侧方设置磁性件,还在定子的沿振子振动方向的两端增设磁性件。这种马达,振子靠设置在定子侧方的磁性件受到定子的安培力的反作用力来驱动振动,还靠设置在定子两端的磁性件受到定子的电磁力来驱动振动。然而,这种马达定子沿振子振动方向的两端所增设的磁性件,会挤占原来用于设置振子的空间,使得振子设置的相对较小,振子驱动力的提升受到影响。
24.为此,本技术提供一种振动马达,所述振动马达包括定子和能够相对于所述定子
振动的振子,所述振子包括第一磁钢组件,所述第一磁钢组件位于所述定子的垂直于所述振子振动方向的一侧,在所述第一磁钢组件和所述定子的配合下,所述振子能够受到所述定子的电磁力和安培力的反作用力以实现往复振动。上述振动马达,在工作时其振子能够同时受到定子的电磁力和定子的安培力的反作用力的电磁力,有利于提高振子振动的驱动力,并且第一磁钢组件设于所述定子的垂直于所述振子的振动方向的一侧,还能够很好地保证其他结构的尺寸。
25.需要说明的是,本技术所述的振动马达,可应用于手机、掌上游戏机、导航装置或者掌上多媒体娱乐设备,作为相应的触觉反馈结构。
26.下面结合图1至图3对振动马达进行详细描述。
27.图1是根据一示例性实施例示出的一种振动马达的立体分解图。请参照图1,并在必要时结合图2至图3所示,所述振动马达包括定子10和能够相对于所述定子10振动的振子20,所述振子20包括第一磁钢组件221,所述第一磁钢组件221位于所述定子10的垂直于所述振子20振动方向的一侧,在所述第一磁钢组件221和所述定子10的配合下,所述振子20能够受到所述定子10的电磁力和安培力的反作用力以实现往复振动。
28.请结合图2和图3所示,这里的振子20的振动方向可以理解为图2和图3中双向箭头l所指的方向。所述定子10具有相背离的两侧边101、102,定子10的这两个侧边101、102在垂直于振子20的振动方向的方向上排布,即沿垂直于双向箭头方向l的方向排布。这里所述第一磁钢组件221位于所述定子10的垂直于所述振子20振动方向的一侧,具体可以理解为所述第一磁钢组件221位于定子101的侧边101所在的一侧。
29.该振动马达还包括底板30。所述定子10固定于所述底板30。所述振子20还包括质量块21,所述质量块21的中部具有贯穿所述质量块21上下表面的容设空间201,所述第一磁钢组件位于所述容设空间201内并固定于所述质量块21。所述定子10设于所述容设空间201内。
30.具体的,在一些实施例中,所述第一磁钢组件221包括第一磁钢2211、第二磁钢2212及第三磁钢2213,其中,所述第一磁钢2211与所述定子10正对设置,第二磁钢2212、第三磁钢2213分别设于所述第一磁钢2211沿振子20振动方向的两端,所述第一磁钢2211沿垂直于所述振子20振动的方向充磁,所述第二磁钢2212的充磁方向和第三磁钢2213的充磁方向均与所述第一磁钢2211的充磁方向相反。
31.这里第二磁钢2212和第三磁钢2213的尺寸可以相同。
32.请结合图3所示,这里的第一磁钢朝向定子10的一侧为n极,背离定子10的一侧为s极。相应地,第二磁钢2212、第三磁钢2213朝向定子10的一侧为s极,背离定子10的一侧为n极。
33.在一些实施例中,所述振子20还包括第二磁钢组件222,所述第二磁钢组件222与所述第一磁钢2211组件对称设于所述定子10的两侧。即该第二磁钢组件222位于定子10的侧边102所在的一侧。所述第二磁钢组件也相应位于所述容设空间201内并固定于所述质量块21。
34.具体的,在一些实施例中,所述第二磁钢组件222包括与所述第一磁钢2211对称的第四磁钢2221、与所述第二磁钢2212对称的第五磁钢2222及与所述第三磁钢2213对称的第六磁钢2223;其中,所述第四磁钢2221的充磁方向与所述第一磁钢2211的充磁方向相反,所
述第五磁钢2222的充磁方向和所述第六磁钢2223的充磁方向均与所述第一磁钢2211的充磁方向相同。
35.请继续结合图3所示,相应地,第四磁钢2221朝向定子10的一侧为n极,背离定子10的一侧为s极。第五磁钢2222、第六磁钢2223朝向定子10的一侧为s极,背离定子10的一侧为n极。
36.所述定子10包括固定于所述底板30的绕线支架11及绕设于所述绕线支架11的线圈12。该绕线支架11包括绕设线圈12的铁芯111,及位于铁芯111两端的极靴112、113。极靴112、113固定于底板30上。
37.在一些实施例中,所述第一磁钢2211沿所述振子20振动方向的尺寸与所述线圈12沿所述振子20振动方向的尺寸相同,所述第四磁钢2221沿所述振子20振动方向的尺寸与所述线圈沿所述振子20振动方向的尺寸相同,以使得初始位置时,线圈12能够完全处在第一磁钢2211、第四磁钢2221所形成的磁场中。
38.当然,在其它一些实施例中,第一磁钢2211沿所述振子20振动方向的尺寸也可大于所述线圈12沿所述振子20振动方向的尺寸,第四磁钢2221沿所述振子20振动方向的尺寸也可大于所述线圈沿所述振子20振动方向的尺寸。
39.在一些实施例中,所述第二磁钢2212、所述第三磁钢2213分别通过粘结层2201与所述第一磁钢2211粘结于一起,所述第五磁钢2222、所述第六磁钢2223分别通过粘结层2201与所述第四磁钢2221粘结于一起。如此设置,使得第一磁钢组件221为一个整体件,第二磁钢组件222为一个整体件,方便第一磁钢组件221、第二磁钢组件222的对位组装。
40.在一些实施例中,所述振动马达包括第一隔磁片231和第二隔磁片232,所述第一隔磁片231设于所述第一磁钢2211组件与所述质量块21之间,所述第二隔磁片232设于所述第二磁钢组件222与所述质量块21之间,从而有利于将各磁钢组件的磁路控制在容设空间201内,有利于进一步提高定子与各磁钢组件之间的配合,提高振子的驱动力。
41.在一些实施例中,所述振动马达包括弹性组件40。所述振子20通过所述弹性组件40连接于所述底板30。
42.具体的,在一些实施例中,所述弹性组件40包括第一弹性支架41和第二弹性支架42。所述第一弹性支架41和所述第二弹性支架42设于所述质量块21的沿所述振子20的振动方向的两端。第一弹性支架41包括弹性主体部411及自弹性主体部411两端向同侧折弯形成的安装部412、413。所述弹性主体部411具体悬空设置。安装部412、413分别通过焊片81、82焊接于质量块沿垂直于振子20振动方向的两侧。第二弹性支架42的结构与第一弹性支架41的结构类似,且与第一弹性支架41对称设置,采用同样的方式组装于质量块21上。
43.进一步,该振动马达还包括两个限位挡块50。两个限位挡块50固定于底板30上,并分别位于定子10沿振子20振动方向的两端外侧,以对质量块21的振动进行限位。
44.进一步,该振动马达还包括设于底板30的柔性板70,该柔性板70设于绕线支架11的底部,并通过引线延伸至振动马达外侧,以用于连接线圈12与所述振动马达外的控制电路板,以对线圈12中的电流进行控制。
45.此外,该振动马达还包括设于质量块21及弹性组件40之间的阻尼泡棉110,以使得振子的振动更加柔和。该振动马达还包括设于底板30外侧的胶层,以将振动马达贴装固定于其他结构上,比如贴装于手机的中框。
46.具体使用时,该该振动马达的线圈中通入交流电来控制振子的振动。请结合图3所示,基于振动马达的上述结构,图3所示的振子位置可以视为振子初始位置,振子开始运动时,向线圈中通入图3所示电流,根据左手定则,定子10受到向左的安培力,相应给磁钢组件提供如图3所示的安培力的反作用力f1。此时极靴113所在的一端为定子的n极,极靴112所在的一端为定子的s极。相应地,磁钢组件的第二磁钢2212、第三磁钢2213、第五磁钢2222及第六磁钢2223受到定子的电磁力合力f3(也可称为电磁力f3)。即振子20受到向右的作用力f1和f3的合力而向右移动,在向右移动的过程中,振子20受到弹性组件40向左的弹性力,直至移动至右侧最大位移处,开始向左移动。在振子20移动回至图3所示的初始位置时,电流反向,振子20所受的作用力为与f1和f3的合力相反的作用力,从而向左移动,在弹性组件40提供的弹性力的作用下,直至左侧最大位移处再向右移动直至初始位置。继而再向线圈通入向图3所示的电流,从而实现振子20的往复振动。
47.发明人们通过大量试验验证,上述振动马达的稳态振动量及瞬态加速度,相较于目前的振动马达的稳态振动两及瞬态加速度均得到很好的提高。从而很好地提高了采用上述振动马达的电子设备的触觉效果,提高了用户体验。
48.本技术另一种电子设备,所述电子设备包括如上所述的振动马达。这里的电子设备可以是手机、掌上游戏机等。
49.本领域技术人员在考虑说明书及实践这里公开的公开后,将容易想到本技术的其它实施方案。本技术旨在涵盖本技术的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本技术的一般性原理并包括本技术未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本技术的真正范围和精神由下面的权利要求指出。
50.应当理解的是,本技术并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本技术的范围仅由所附的权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1