一种磁悬浮产品的升降机构的制作方法
1.本实用新型属于磁悬浮技术领域,尤其是指一种磁悬浮产品的升降机构。
背景技术:
2.现有的磁悬浮产品,例如磁悬浮灯具、音响、玩具球等,通常包括底座和悬浮体,底座内具有磁性悬浮模块,磁性悬浮模块和悬浮体之间产生磁力,进而将悬浮体悬浮于底座上方。为了实现悬浮体的升降效果,在底座内部设置升降机构,通过升降机构带动磁性悬浮模块升降,从而控制悬浮物的升降。但是,现有磁悬浮升降机构的结构较为复杂,导致体积也随之变大,而且制造成本高,致使出售价格昂贵。
技术实现要素:
3.本实用新型的目的在于提供一种磁悬浮产品的升降机构,结构简单、成本低,而且升降效果稳定。
4.为达成上述目的,本实用新型的解决方案为:一种磁悬浮产品的升降机构,包括与悬浮体磁极同性相对设置的活动座以及设置在活动座下方的滑块、卷带、卷带盘、电控驱动组件和底座,所述底座上设有支座以及开设在支座侧部的竖槽,支座上设置所述卷带盘,所述电控驱动组件枢接卷带盘的中心以驱动卷带盘旋转,卷带绕接在卷带盘外表面,卷带的内端与卷带盘固定,卷带的外端与滑块的下部固定,滑块滑动配合所述竖槽内,滑块的上部与所述活动座固定。
5.作为优选方案,所述支座上开设横向的筒形腔,筒形腔内置所述卷带盘和卷带,筒形腔一侧在竖槽顶部开设斜口,卷带的外端从斜口倾斜穿出并置入所述竖槽内。
6.作为优选方案,所述卷带盘沿径向开设回形通道,回形通道侧面为镂空结构,所述卷带的内端从卷带盘侧部以回形结构配合伸入所述回形通道内。
7.作为优选方案,所述电控驱动组件包括pcb模块、电机、感应器模块,所述pcb模块和所述电机固定在所述底座上,pcb模块连接所述电机和感应器模块,所述电机的电机轴连接所述卷带盘的中心。
8.作为优选方案,所述感应器模块为人体感应的感应器模块。
9.作为优选方案,所述活动座的底部设有轴套,所述底座上设有导向轴,所述轴套套接在导向轴外部。
10.作为优选方案,所述卷带为钢制。
11.作为优选方案,所述卷带盘的材质为塑料。
12.采用上述方案后,本实用新型的增益效果在于:本实用新型利用卷带本身的特性来设计,卷带本身可以绕卷以此来减小体积,同时能够通过提拉运动产生对活动座的升降力,使得悬浮体随之升降,升降效果稳定,结构上更新颖、简洁,体积小,且都是易生产的零部件,大大节省制造成本,满足各型企业的生产需求。
附图说明
13.图1是本实用新型磁悬浮产品的外部结构示意图;
14.图2是本实用新型磁悬浮产品的内部结构示意图;
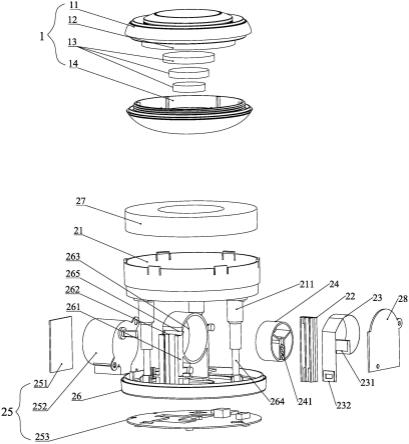
15.图3是本实用新型升降机构和悬浮体的分解示意图;
16.图4是本实用新型升降机构和悬浮体的剖视结构示意图。
17.标号说明:1、悬浮体;11、上盖;12、遥控器组件;13、磁性组件;14、下盖;2、升降机构;21、活动座;211、轴套;22、滑块;23、卷带;231、内端;232、外端;24、卷带盘;241、回形通道;25、电控驱动组件;251、pcb模块;252、电机;253、感应器模块;26、底座;261、支座;262、竖槽;263、筒形腔;264、导向轴;265、斜口;27、环形磁铁块;28、卷带盘盖;3、外壳。
具体实施方式
18.以下结合附图及具体实施例对本实用新型做详细的说明。
19.如图1和图2所示,本实用新型涉及一种磁悬浮产品,包括悬浮体1、升降机构2和外壳3,所述外壳3呈圆筒状,套置在升降机构2的外部,悬浮体1悬浮在升降机构2的顶部。
20.所述悬浮体1可以是任意需要悬浮的产品,本实施例以遥控器为例对悬浮体1的主要结构进行说明,所述遥控器(悬浮体1)包括上盖11、遥控器组件12、磁性组件13和下盖14,所述上盖11和下盖14旋合在一起,上盖11和下盖14之间设置遥控器组件12和磁性组件13,磁性组件13包括大中小三块磁铁,三块磁铁异极相吸成一整体,固定在遥控器组件12的下端,下盖14和遥控器组件12固定在一起。
21.请重点参阅图2至图4,本实用新型提供一种磁悬浮产品的升降机构2,包括活动座21以及设置在活动座21下方的滑块22、卷带23、卷带盘24、电控驱动组件25和底座26,外壳3与底座26固定。
22.活动座21上设有凹槽用于固定安装一环形磁铁块27,该环形磁铁块27与悬浮体1的磁性组件13磁极同性相对设置,从而产生排斥,在重力和磁力平衡下保持一定距离,使上面的悬浮体1产生悬浮效果。
23.如图4所示,滑块22的上部与所述活动座21固定,所述底座26上设有支座261以及开设在支座261侧部的竖槽262,滑块22竖直滑动配合所述竖槽262内。在优选实施例中,所述支座261上开设横向的筒形腔263,筒形腔263内置所述卷带盘24和卷带23,所述电控驱动组件25枢接卷带盘24的中心以驱动卷带盘24旋转,卷带23绕接在卷带盘24外表面,卷带23的内端231与卷带盘24固定,筒形腔263一侧在竖槽262顶部开设斜口265,卷带23的外端232从斜口265倾斜穿出并置入所述竖槽262内与滑块22的下部固定,滑块22滑动配合在所述竖槽262内,卷带23的外端232沿竖槽262向上滑动时,卷带23的外端232通过与之固定的滑块22推动活动座21上升。本实用新型所述卷带23采用高强度的钢材制作而成,所述卷带盘24采用塑料制成。
24.所述活动座21的底部设有轴套211,所述底座26上设有导向轴264,所述轴套211套接在导向轴264外部,活动座21上下升降时,轴套211沿导向轴264上下滑动,轴套211和导向轴264可以起到良好的导向的作用,使各部位升降更均衡、稳定;这样的导向结构共有三组间隔设置。
25.所述卷带盘24沿径向开设回形通道241,回形通道241侧面为镂空结构,所述卷带
23的内端231从卷带盘24侧部以回形结构配合伸入所述回形通道241内,这样卷带23内端231能够固定得更牢固,而且可以从侧面插入和退出实现便捷拆装,最后筒形腔263侧面盖合一卷带盘盖28即可。
26.本实用新型特别采用感应的方式进行驱动,所述电控驱动组件25包括pcb模块251、电机252、感应器模块253,所述pcb模块251和所述电机252固定在所述底座26上,pcb模块251连接所述电机252和感应器模块253,感应器模块253固定在pcb模块251上,所述电机252的电机252轴连接所述卷带盘24的中心,所述感应器模块253可以为人体感应的感应器模块253。
27.本实用新型的具体工作过程如下:
28.上升过程:感应器模块253感应到人后,通过pcb模块251发出信号启动电机252,电机252转动带动卷带盘24转动,然后卷起固定在它上面的卷带23,卷带23的外端232慢慢上升,拉动与它固定的滑块22上升,滑块22的上部由于固定底座26上,从而带动活动座21和固定在活动座21的环形磁铁块27往上升,其中轴套211在导向轴264上滑动使整个机构保持平稳运动。由于环形磁铁块27往上升,上面遥控器由于同极相斥,与环形磁铁块27保持相等距离,所以遥控器也会往上升,实现遥控器悬浮上升效果。当上升到一定距离,电机252停止转动,遥控器保持一定高度悬浮。
29.下降过程:感应器模块253检测到人离开后,通过pcb模块251发出信号启动电机252,使电机252产生反转,带动卷带盘24反向转动,然后把卷起的卷带23卷开,滑块22、由于重力和卷带23外端232带动往下运动,同时滑块22会带动活动座21和上面的环形磁铁块27往下运动。由于环形磁铁块27和上面的遥控器在重力和磁力平衡作用下悬浮距离保持相同,所以遥控器也会跟着往下降,产生悬浮下降效果,电机252也最终落到位后停止转动,最终落在外壳3上。
30.以上所述仅为本实用新型的较佳实施例,并非对本案设计的限制,凡依本案的设计关键所做的等同变化,均落入本案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1