一种无刷电机矩阵级联控制系统的制作方法
1.本实用新型属于电机控制技术领域,具体涉及用于大规模数量电机控制的一种无刷电机矩阵级联控制系统。
背景技术:
2.电机矩阵是包含了上百甚至上千个电机单元的阵列化运动控制系统,通过直线运动单元,将电机的旋转运动转化为立体空间内的升降和伸缩,在计算机控制下可呈现出曲线、曲面、平面、文字和三维图案等各种造型,主要应用于大型的展厅展馆,例如科技馆和艺术馆等。每个运动单元作为像素点,大量像素点组成一块巨幕,并通过自动化控制进行协同运动,展现出艺术方案。
3.现有技术在进行电机矩阵控制时,主要采用can(controller area network,控制器局域网络)等总线通信进行一主多从控制,但从控制器通常采用can总线电机,即一个从控制器对应控制一个电机并作为一个can节点,对于can收发器的负载能力通常只能连接100个节点左右,相当于一条总线只能控制100个电机,当超过最大组网节点数量则需要通过中继器来增加负载节点或采用多路can控制器,其网络拓扑结构越复杂,布线施工就越繁琐,再加上总线电机成本较高,不适用于大规模扩展。此外,现有的电机主要采用步进电机,但步进电机体积较大,供电电压较高,能源效率低,在采用can总线时同样具有上述布线繁琐和成本较高的问题,同时,当采用一个从控制器控制多个步进电机时,因步进电机体积较大难以实现单元内高密度的连接控制。另外,现有的总线连接方式仅采用菊花链拓扑结构方式,即串联连接,总线连接方式单一,不利于连接扩展。
4.可见,现有的电机矩阵控制系统难以实现大规模的电机矩阵控制,控制效果较差。
技术实现要素:
5.本实用新型的目的是提供一种无刷电机矩阵级联控制系统,用于解决现有技术中的电机矩阵控制系统难以实现大规模的电机矩阵控制,联动控制效果较差的技术问题。
6.为了实现上述目的,本实用新型采用以下技术方案:
7.本实用新型提供一种无刷电机矩阵级联控制系统,包括集成can的主控制器和多个从控制器,所述主控制器与多个从控制器之间采用由总线型拓扑和菊花链拓扑组成的混合型拓扑结构进行can总线连接通信,每一所述从控制器分别连接有多路无刷直流电机和多路角度传感器,每一角度传感器与每一无刷直流电机一一对应设置;其中,
8.所述主控制器用于将内存中的总编码信息解码为多个单元编码信息,并将多个单元编码信息通过can总线分发至对应的从控制器中进行存储;
9.所述从控制器用于接收所述主控制器发送的对应单元的运行信息,读取内部存储的单元编码信息,并解码得到各无刷直流电机的目标位置信息;
10.所述从控制器还用于接收各无刷直流电机对应的各角度传感器采集的模拟信号,将模拟信号转化为电机当前位置信息,并将电机当前位置信息与目标位置信息进行比对,
以根据各比对结果同步发送控制指令至各无刷直流电机;
11.所述无刷直流电机用于接收所述控制指令并运动至目标位置。
12.在一种可能的设计中,每一所述从控制器分别连接有24路集成pwm驱动的无刷直流电机和24路角度传感器。
13.在一种可能的设计中,所述角度传感器采用磁编码器。
14.在一种可能的设计中,所述从控制器包括24路adc引脚、24路pwm引脚和至少一路can引脚;其中,
15.24路adc引脚用于利用传感器接口与24路角度传感器连接,24路pwm引脚用于利用电机接口与24路集成pwm驱动的无刷直流电机连接,每路can引脚用于利用can收发接口与所述主控制器连接。
16.在一种可能的设计中,所述从控制器采用片上内存来存储多个所控制单元内的各无刷直流电机的目标位置信息。
17.在一种可能的设计中,所述主控制器采用片上内存来存储所述总编码信息。
18.在一种可能的设计中,所述系统还包括工控机,所述工控机与所述主控制器进行通信来改写所述主控制器中片上内存的总编码信息。
19.在一种可能的设计中,所述主控制器与所述工控机进行串口通信。
20.有益效果:
21.本实用新型通过将主控制器与多个从控制器之间采用总线型拓扑和菊花链拓扑组成的混合型拓扑结构进行can总线连接通信,每一所述从控制器分别连接有多路无刷直流电机和多路角度传感器,每一角度传感器与每一无刷直流电机一一对应设置,主控制器集中管理从控制器,从控制器分散控制各无刷直流电机,从而实现无刷电机矩阵的级联控制,其中,将一个从控制器与多个无刷直流电机作为一个can节点,有效减少了布线等各方面成本,同时,采用集成驱动的小型无刷直流电机,具有成本低、体积小巧以及利于电机大规模扩展的优势;此外,通过将总线连接采用总线型拓扑和菊花链拓扑组成的混合型拓扑结构,可根据电机矩阵的需求,进行拓展连接,从而进一步适用于电机大规模扩展;另外,通过多级存储,减轻can总线网络传输负载,提高电机矩阵控制系统的动态响应性能,保证大规模电机矩阵实时控制,提高电机联动控制效果。
附图说明
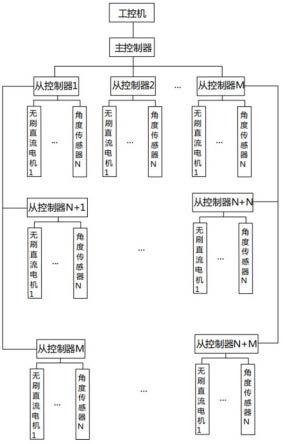
22.图1为本实施例中的无刷电机矩阵级联控制系统的结构框图;
23.图2为本实施例中的无刷电机矩阵级联控制系统的另一结构框图。
24.1-主控制器;2-从控制器;3-无刷直流电机;4-角度传感器;5-工控机。
具体实施方式
25.为使本说明书实施例的目的、技术方案和优点更加清楚,下面将结合本说明书实施例中的附图,对本说明书实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本说明书一部分实施例,而不是全部的实施例。基于本说明书中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.实施例
27.如图1和图2所示,本实用新型提供一种无刷电机矩阵级联控制系统,包括集成can的主控制器1,包括集成can的主控制器1和多个从控制器2,所述主控制器1与多个从控制器2之间采用总线型拓扑和菊花链拓扑组成的混合型拓扑结构进行can总线连接通信,每一所述从控制器2分别连接有多路无刷直流电机3和多路角度传感器4,每一角度传感器4与每一无刷直流电机3一一对应设置;
28.其中,所述主控制器1用于将内存中的总编码信息解码为多个单元编码信息,并将多个单元编码信息通过can总线分发至对应的从控制器2中进行存储;其中,优选的,主控制器1采用片上内存保存所述总编码信息;
29.其中,需要说明的是,所述总编码信息是指电机矩阵中各电机运行的角度位置信息,该总编码信息有多组,每一组总编码信息可解码为对应的多个单元编码信息,多个单元编码信息对应于一从控制器2控制的多个电机单元的运行角度位置信息。例如,有多张图片或文字的像素值(即多组总编码信息),各像素值对应电机矩阵的各运行角度位置信息,其中,一组总编码信息可为一张待展示的图片或待展示的文字等。
30.所述从控制器2用于接收所述主控制器1发送的对应单元的运行信息,读取内部存储的单元编码信息,并解码得到各无刷直流电机3的目标位置信息;其中,优选的,所述从控制器2采用片上内存来存储多个所控制单元内的各无刷直流电机3的目标位置信息;
31.所述从控制器2还用于接收各无刷直流电机3对应的各角度传感器4采集的模拟信号,将模拟信号转化为电机当前位置信息,并将电机当前位置信息与目标位置信息进行比对,以根据各比对结果同步发送控制指令至各无刷直流电机3;
32.所述无刷直流电机3用于接收所述控制指令并运动至目标位置。
33.具体的,在实施例中,主控制器1将一组总编码信息,解码为各单元编码信息并发送至对应的从控制器2,则从控制器2接收到各单元编码信息后将其存储在内存中,而后,主控制器1向从控制器2发送该组总编码信息对应的各单元运行信息,从控制器2接收该运行信息并读取内存中对应的单元编码信息,解码为所控制的单元内各无刷直流电机3的目标位置信息。即本实施例中的主控制器1向从控制发送的信息包括编码信息和运行信息,总而可以减轻can总线网络的传输负载,以保证大规模电机矩阵的实时控制。
34.其中,需要说明的是,本实施例中所述主控制器1、所述从控制器2、所述无刷直流电机3以及所述角度传感器4之间的处理流程可以基于现有流程常规改动得到。
35.基于上述公开的内容,本实施例通过将主控制器1与多个从控制器2之间采用总线型拓扑和菊花链拓扑组成的混合型拓扑结构进行can总线连接通信,每一所述从控制器2分别连接有多路集成pwm驱动的无刷直流电机3和多路角度传感器4,每一角度传感器4与每一无刷直流电机3一一对应设置,主控制器1集中管理从控制器2,从控制器2分散控制各无刷直流电机3,从而实现无刷电机矩阵的级联控制,其中,将一个从控制器2与多个无刷直流电机3作为一个can节点,有效减少了布线等各方面成本,同时,采用集成驱动的小型无刷直流电机3,具有成本低、体积小巧以及利于电机大规模扩展的优势;此外,通过将总线连接采用总线型拓扑和菊花链拓扑组成的混合型拓扑结构,可根据电机矩阵的需求,进行拓展连接,从而进一步适用于电机大规模扩展;另外,通过多级存储,减轻can总线网络传输负载,提高电机矩阵控制系统的动态响应性能,保证大规模电机矩阵实时控制,提高电机联动控制效
果。
36.在一种具体的实施方式中,所述系统还包括工控机5,所述工控机5与所述主控制器1进行通信来改写所述主控制器1中片上内存的总编码信息;优选的,所述主控制器1与所述工控机5进行串口通信。
37.其中,需要说明的是,所述工控机5中嵌设有数据处理软件,当需要利用电机矩阵对图片或文字进行大屏展示时,则用户可通过工控机5中的软件输入图片或文字,并对图片或文字进行数据处理生成总编码信息,并发送至所述主控制器1。
38.其中,需要说明的是,当主控制器1在第一次接收到总编码信息之后,主控制器1将总编码信息保存至片上内存中,若不需要对总编码信息进行调整,主控制器1可脱离工控机5的控制,通过读取片上内存中的总编码信息实现脱机运行。
39.其中,需要说明的是,从控制器2存储各单元编码信息的作用是减轻can总线网络传输负载,则无论主控制器1是否脱机运行,从控制器2均是通过先通过存储信息后,再读取运行信息,从而提高电机矩阵控制系统的动态响应性能,进一步保证大规模电机矩阵的实时控制。
40.其中,需要说明的是,本实施例中的主控制器1和从控制器2均采用微处理器mcu(microcontroller unit,微控制单元或单片机),优选的,所述从控制器2可以是既能控制电机执行动作,也可以接收并控制传感器动作的控制器,也可以是分别设置用于控制电机执行动作的第一控制器和第二控制器,由第一控制器和第二控制器组成反馈控制系统,此处不做限定。
41.在一种具体的实施方式中,每一所述从控制器2分别连接有24路集成pwm驱动的无刷直流电机3和24路角度传感器4;优选的,所述角度传感器4采用磁编码器,则本实施例中的传感器采集并输出的信号量是模拟量,优选的,所述从控制器2包括24路adc(analog to digital converter,模数转换)引脚、24路pwm引脚和至少一路can引脚;其中,24路adc引脚用于利用传感器接口与24路角度传感器4连接,24路pwm引脚用于利用电机接口与24路集成pwm驱动的无刷直流电机3连接,每路can引脚用于利用can收发接口与所述主控制器1连接。
42.其中,需要说明的是,本实施例中的无刷电机矩阵级联控制系统具体的工作原理为:
43.工控机5接收用户输入的待展示图片、文字和视频等信息,利用内设的软件对待展示数据进行处理后生成总编码信息,并发送至主控制器1,主控制器1接收到总编码信息后对其进行解码,生成多个单元编码信息,将总编码信息存储到片上内存中,同时将多个单元编码信息发送至各个从控制器2,从控制器2接收到单元编码信息后将其存储至片上内存,同时将其解码为电机的目标位置信息,然后,从控制器2接收主控制器1发送的控制单元的各电机的运行信息,根据运行指令读取电机的目标位置信息,同时通过传感器采集电机的当前位置信息,将当前位置信息与目标位置信息进行比对,并根据各比对结果同步发送控制指令至各无刷直流电机3,以控制电机运动至目标位置,实现电机矩阵的pid位置闭环控制。
44.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型的保护范围。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1