一种发电机转子冲片自动叠片机的制作方法
1.本实用新型涉及发电机转子冲片的自动叠片机技术领域,尤其是一种发电机转子冲片自动叠片机。
背景技术:
2.专利号为zl202022805042.6及zl202120253467.2的实用新型专利公开了一种叠片机,转盘输送机构、上料机构、加料装置、测量机构、托料机构、切换台机构和推料机构,实现对转子冲片进行自动化的叠片,但存在以下问题:
3.(1)因为冲片冲裁后可能会存在变形不平的现象,所以当冲片大量叠加后,叠片组整体上看一边可能会翘起或者高低不平,且重量分配也不均匀;
4.(2)没有对上料机构处的叠片极限高度进行设置,若叠片超出加料装置处所设定的重量,加料装置无法自动减少叠片数量;
5.因此,需要改进。
技术实现要素:
6.本实用新型目的是提供一种能有效解决上述技术问题发电机转子冲片自动叠片机,本实用新型采用如下技术方案:
7.一种发电机转子冲片自动叠片机,包括送料装置、理片装置以及加料装置;所述理片装置包括基座、设置在基座上的转台、设置在转台上的若干工位以及用于安装冲片的工装轴,若干工位分别为移入工位、落料工位、加料工位以及移出工位;所述转台包括设置在基座上的分割器、设置在分割器上的转盘,所述工位包括旋转安装在转盘上的旋转座,所述基座上位于落料工位的下方设置有驱动该工位上的旋转座旋转的旋转机构,旋转座上设置有用于安装工装轴的安装位;所述落料工位处设置有用于感应工装轴的第一传感器、用于感应叠片高度并向旋转机构输出转动信号的第二传感器以及用于感应叠片上限高度的第三传感器,所述加料工位处设置有加料装置以及测量叠片组重量的称重传感器。
8.进一步的,所述称重传感器的重量设定值大于到达叠片上限高度的叠片组的重量值。
9.进一步的,所述第一传感器、第二传感器以及第三传感器由下至上依次设置。
10.进一步的,第一传感器、第二传感器、第三传感器均为激光测距传感器。
11.进一步的,所述转台还包括与转盘连接并跟随转盘转动的所述自转锁定机构,所述旋转座的外周设置有若干个第一缺口,所述自转锁定机构设置在若干工位之间,所述自转锁定机构对应每个工位设置一个自锁组件,所述自锁组件包括自锁气缸和设置在自锁气缸输出端的与所述第一缺口形状匹配的锁定块。
12.进一步的,所述旋转机构包括驱动器、升降固定板、升降驱动板、驱动板轴和拉杆;所述驱动器固定在基座上,所述升降固定板、升降驱动板、拉杆和驱动器相互同轴设置,所述驱动板轴圆周阵列设置于所述升降驱动板上,且一端插设于所述升降固定板上,所述驱
动板轴的顶端形成用于与旋转座的底部接触的驱动端。
13.采用上述技术方案, 通过设置第一传感器、第二传感器、第三传感器、称重传感器、以及驱动旋转座旋转的旋转机构,其中,第一传感器用于感应落料工位处是否有工装轴,第二传感器置于第一传感器上方用于感应叠片高度,当叠片高度超过设定值,比如叠片过半时,旋转机构驱动旋转座旋转180
°
,然后继续叠片,第三传感器用于感应叠片上限高度,当到达上限高度时候,停止叠片,转盘带动旋转座旋转90
°
,使得叠片后的工装轴移动到加料工位。因为采用叠片过半旋转180
°
再叠片的形式,叠片组在工装轴上整体上会处于比较平整的状态,且重量分配比较均匀。
14.另外,如果把加料工位处的称重传感器的重量设定值设定成大于在落料工位处到达叠片上限高度的叠片组的重量值,因此,当叠片后的工装轴到达加料工位处后,必然要进行加料的作业,保证了单个工装轴上叠片的一致性。
附图说明
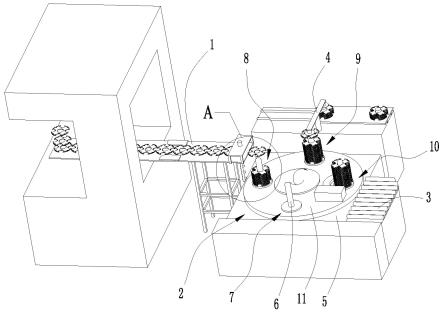
15.图1为本实用新型的立体示意图。
16.图2为转台的俯面示意图。
17.图3为自转锁定机构与旋转座的侧面示意图。
18.图4为旋转机构的示意图。
19.图5为图1中a处放大示意图。
具体实施方式
20.下面结合附图和具体实施例,对本实用新型进行说明。
21.如图1-5所示,一种发电机转子冲片的自动叠片机,包括送料装置1、理片装置2、出料装置3以及加料装置4。
22.理片装置2包括基座5、设置在基座5上的转台、设置在转台上的若干工位以及用于安装冲片的工装轴6,若干工位分别为移入工位7、落料工位8、加料工位9以及移出工位10,送料装置1的输出端靠近落料工位8,移出工位10靠近出料装置3的输入端,加料装置4设置在加料工位9处。
23.转台包括设置在基座5上的分割器、设置在分割器上的转盘11以及与转盘11连接并跟随转盘11转动的自转锁定机构12,工位包括旋转安装在转盘11上的旋转座13,基座5上位于落料工位8的下方设置有驱动该工位上的旋转座13旋转的旋转机构,旋转座13上设置有用于安装工装轴6的安装位,旋转座13的外周设置有两个第一缺口14,两个第一缺口14绕旋转座13的中心呈180
°
阵列设置,自转锁定机构12设置在若干工位之间,自转锁定机构12对应每个工位设置一个自锁组件,自锁组件包括自锁气缸和设置在自锁气缸输出端的与第一缺口14形状匹配的锁定块15。
24.如图4所示,旋转机构包括驱动器71、支座72、升降固定板73、升降驱动板74、驱动板轴75和拉杆76;驱动器71固定设置于支座72上,支座72安装在基座5上,升降固定板73、升降驱动板74、拉杆76和驱动器71相互同轴设置,驱动板轴75圆周阵列设置于升降驱动板74上,且一端插设于升降固定板73上,驱动板轴75的顶端形成用于与旋转座13的底部接触的驱动端。升降固定板73上升并使得驱动端于旋转座13的底部接触,然后通过驱动器71驱动
升降固定板73旋转,带动旋转座旋转。
25.工装轴6包括底板20和固设在底板20上并垂直与底板20的安装轴21,安装轴21的侧壁上伸出有止转凸块22,止转凸块22与冲片23上的内孔匹配,用于冲片23的止转。底板20上设置有第二缺口24,安装位包括与底板20外形匹配的沉台25和设置在沉台25内与第二缺口24匹配的第二凸起26。
26.落料工位8处设置有用于感应工装轴6的第一传感器27、用于感应叠片高度并向旋转机构输出转动信号的第二传感器28以及用于感应叠片上限高度的第三传感器29,第一传感器27、第二传感器28以及第三传感器29由下至上依次设置,第一传感器27、第二传感器28、第三传感器29均为激光测距传感器。加料工位9处设置有测量叠片组重量的称重传感器。称重传感器的重量设定值大于到达叠片上限高度的叠片组的重量值。
27.送料装置1、出料装置3以及加料装置4为现有技术,此处不再赘述。
28.本实用新型的工作原理如下:
29.(1)人工将工装轴6移入到移入工位7处,转台驱动移入工位7上的工装轴6转到落料工位8处,第一传感器27感应到工装轴6,送料装置1开始向工装轴6输送发电机转子冲片,发动机转子冲片套在工装轴6上并堆叠;
30.(2)第二传感器28检测到叠片过半后,发送信号给旋转机构,旋转机构驱动旋转座13上的工装轴6旋转180
°
,然后继续叠片,当第三传感器29检测到叠片高度到达上限高度时,转台带动工装轴6旋转90
°
到达加料工位9处;
31.(3)加料工位9处对叠片后的工装轴6称重并进行加料,叠片组重量达到设置值时,转台驱动工装轴6旋转90
°
到达移除工位,并被移出到出料装置3上,出料装置3为滚筒输送带,将工装轴6输出。
32.采用上述技术方案,通过设置固定在转盘11上的自转锁定机构12,其通过锁定块15伸出到对应的旋转座13的第一缺口14中,能够使得旋转座13相对转盘11锁定,避免其产生自转,且转盘11在整体旋转过程中,也不会影响到旋转座13的锁定。
33.通过设置第一传感器27、第二传感器28、第三传感器29、称重传感器、以及驱动旋转座13旋转的旋转机构,其中,第一传感器27用于感应落料工位8处是否有工装轴6,第二传感器28置于第一传感器27上方用于感应叠片高度,当叠片高度超过设定值,比如叠片过半时,旋转机构驱动旋转座13旋转180
°
,然后继续叠片,第三传感器29用于感应叠片上限高度,当到达上限高度时候,停止叠片,转盘11带动旋转座13旋转90
°
,使得叠片后的工装轴6移动到加料工位9。因为采用叠片过半旋转180
°
再叠片的形式,叠片组在工装轴6上整体上会处于比较平整的状态,且重量分配比较均匀。
34.另外,如果把加料工位9处的称重传感器的重量设定值设定成大于在落料工位8处到达叠片上限高度的叠片组的重量值,因此,当叠片后的工装轴6到达加料工位9处后,必然要进行加料的作业,保证了单个工装轴6上叠片的一致性。
35.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改、组合和变化。凡在本实用新型的精神和原理之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的权利要求范围之内。
36.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改、组合和变化。凡在本实用新型的精神和
原理之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1