单轴多点联动光伏跟踪支架的制作方法
1.本实用新型涉及太阳能光伏支架,尤其涉及一种单轴多点联动光伏跟踪支架。
背景技术:
2.太阳能光伏板,尤其是大面积的太阳能光伏板阵列或者光伏系统,当其安装在地面上或者水面上时,需要实时地跟踪太阳运动,调整光伏组件的朝向 (例如由东向西的运动),以使太阳光直射至光伏板的受光平面,提高光伏发电量。现有的光伏跟踪支架,例如图1所示的单轴多点联动光伏跟踪支架中,其中有一个驱动位配置电机,其他的驱动位则使用连杆进行传动。亦即,配置电机的主驱动位11其输出轴通过连杆15连接到其它未配置电机的分驱动位 12,由此传递扭矩到分驱动位的输入端,而后者则通过连杆的传动扭矩驱动其上的光伏组件13转向。但是,联动连杆属刚性联接无法适应地形的起伏变化,而且,多个驱动位靠连杆起传动作用,连杆承受的扭力大易发生疲劳断裂现象。尤其是,采用连杆的联动驱动机构,一方面多个驱动位有配置电机的也有不配置电机的,各个驱动位无法实现真正的同步运行,另一方面支架的控制系统无法检测到未设置电机的驱动位的工作状态,任一此类驱动位发生故障都会造成支架的扭曲等严重危害。因此,人们希望提供一种既能实现光伏支架的联动跟踪,又能保证单轴多点联动跟踪支架的多个驱动点能够完全同步运行,且支架不扭曲,能够长时期安全稳定运行的多点联动光伏跟踪支架。
技术实现要素:
3.本实用新型的目的在于克服现有技术的上述缺陷,提供一种单轴多点联动光伏跟踪支架。
4.根据本实用新型的一种单轴多点联动光伏跟踪支架,包括立柱、安装在立柱上的光伏主轴和组件,以及用以驱动该光伏主轴和组件的多个驱动位,所述多个驱动位的每个驱动位设置有驱动电机,所述驱动电机为带霍尔传感器的驱动电机,用以驱动所述光伏支架上的多组光伏组件以形成多点联动的单轴光伏跟踪支架。
5.所述驱动电机通过副立柱侧板安装在所述立柱上。
6.所述副立柱侧板上设置有回转减速机或齿轮减速机,用以配合所述电机驱动所述光伏主轴和组件。
7.所述多个驱动位的每个驱动位设置有光伏主轴倾角传感器。
8.所述的单轴多点联动光伏跟踪支架还包括用以控制所述多个驱动位的驱动电机同步运行的控制器。
9.所述控制器包括用以驱动所述电机并通过pwm控制调节该电机的转速的驱动电路。
10.所述控制器还包括信号处理电路,用以从所述霍尔传感器读取所述多个驱动位上驱动电机的实时运行速度。
11.所述控制器还包括485接口,用以通过角度采集模块获取所述倾角传感器的数据。
12.所述485接口为modbus协议支持的rs485接口。
13.所述控制器还包括用以连接到外部通讯管理机的通讯模块。
14.根据本实用新型的单轴多点联动光伏跟踪支架,由于在每个光伏支架列的多个驱动位均设置有驱动电机,用以多点联动地驱动承载其上的光伏组件的转向,取消了各联动点之间的联动连杆,减少了钢材用量。而且,单轴多点联动光伏跟踪支架配合采用的控制器可以实时精确地控制所述多个驱动位的驱动电机的运行,实现了光伏跟踪支架的多点联动的完全同步,避免了系统在运行过程中可能发生的支架扭曲,保证整个光伏跟踪支架在各种环境下的安全运行。
附图说明
15.图1是表示一个现有技术的光伏跟踪支架的示意图。
16.图2是表示根据本实用新型一个实施例的单轴多点联动光伏跟踪支架的示意图。
17.图3a是表示图2所示单轴多点联动光伏跟踪支架的一个驱动位的示意图。
18.图3b是图3a所示驱动位的局部放大图。
19.图4是表示根据本实用新型的单轴多点联动光伏跟踪支架的一个控制器的配置示意图。
具体实施方式
20.以下将结合附图和实施例对本实用新型的单轴多点联动光伏跟踪支架进行详细的描述,本领域的技术人员可以理解,附图所示的实施例仅仅是示意性的,它用以帮助理解本实用新型的基本构思。
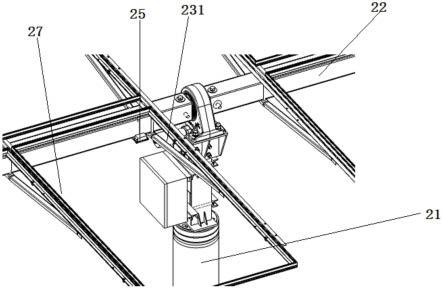
21.图2是表示根据本实用新型一个实施例的单轴多点联动光伏跟踪支架的示意图,图3a是表示图2所示单轴多点联动光伏跟踪支架的一个驱动位的示意图,图3b是图3a所示驱动位的局部放大图。结合参见图1至图3b,根据本实用新型的单轴多点联动光伏跟踪支架,其中的光伏跟踪支架包括至少一个光伏支架列,设置在该光伏支架列上的光伏主轴,以及驱动该光伏主轴转向的多个驱动位,所述多个驱动位的每个驱动位均设置有驱动装置,例如驱动电机、电动推杆和/或回转减速机、齿轮减速机等,所述单轴多点联动光伏跟踪支架还包括用以控制所述多个驱动位的驱动电机同步运行的控制器。具体的,每个光伏支架列20包括多个支架立柱21,以及安装在支架立柱21顶部的光伏主轴22,后者用以承载光伏组件27,并带动光伏组件跟踪太阳的运行轨迹而转向。一个光伏支架列中例如设置有多个驱动位23,每个驱动位上均安装有驱动电机231。
22.换句话说,一个光伏支架列中的多个支架立柱,有的设置有驱动位23用以驱动光伏主轴的转向,有的则不设置驱动位而仅仅用以承载光伏主轴,但设置有驱动位的支架立柱21上必安装有驱动电机。如图2所示,例如在一个光伏支架列的两端的立柱21上设置有驱动位23并安装有驱动电机231,而在位于中间的立柱21’上不设置驱动位。即,一个光伏支架列上的光伏主轴22,可以由位于支架列多个驱动位上的电机231联合驱动转向,取消了现有技术的光伏跟踪支架中,在有的支架立柱上设置带电机的驱动位(称为主动联动点),而在其它的支架立柱上设置不带电机的驱动位(称为从动联动点),并采用推杆等类似连杆将主动联动点和从动联动点连接起来的设计,避免了因主轴过长,连杆易发生疲劳断裂,且从动
联动点被动驱动容易造成支架扭曲的现象。
23.如图3b所示,例如在立柱21的顶部设置有副立柱侧板211,驱动电机231 通过该副立柱侧板安装在立柱上。一个回转减速机212例如也通过该副立柱侧板安装在立柱上,以配合驱动电机控制光伏主轴和组件的转动。
24.图4是表示根据本实用新型的单轴多点联动光伏跟踪支架的一个控制器的配置示意图。结合参见图3和图4,控制器40包括控制电路41、驱动电路44、信号处理电路46、485接口电路43、通讯模块48和电源电路等。其中,驱动电路44用以驱动电机231,并可以通过pwm控制调节驱动电机的转速;信号处理电路46处理来自每个驱动电机的霍尔信号,并将其传送至控制电路41;485 接口电路43例如为modbus协议支持的rs485接口,用以与支架的角度采集模块47通讯;通讯模块48用以将控制器40连接到外部的通讯管理机49,例如将控制器输出的数据经通讯管理机传输至监控后台。
25.驱动电机231例如为一种带霍尔传感器的电机(例如市售的 76jbx236+76zyt040(241800)+ymq)。一个光伏支架列例如设置一台控制器 40,用以控制该支架列上每个驱动位安装的所有驱动电机。控制器40的驱动电路44例如通过端口401连接到各台驱动电机231,后者包含有pwm控制电路,用以调节电机的转速。霍尔采集模块45采集电机的霍尔信号,并通过端口402 将每个电机的霍尔信号传送至控制器40的信号处理电路46。控制电路41从信号处理电路读取经处理的电机运行数据,并将其转换成包括电机转速等控制信号控制驱动电机231的运行。支架各驱动位的负荷因风荷、雪荷或其它环境因素会有差异,故电机的转速也会有相应的差异。控制器40例如通过驱动电机所带的霍尔传感器读取各个驱动位上电机运行时的实时速度,对比各电机的实时速度并通过pwm调节控制,可以使得各个驱动位上的电机的运行速度尽量保持一致。
26.根据本实用新型的单轴多点联动光伏跟踪支架,例如在每个驱动位所在的光伏主轴22上设置有倾角传感器25,可以根据光伏主轴的转向,实时将其倾角数据传送给控制器40。控制器40例如通过485接口43与角度采集模块47通讯,后者用以采集倾角传感器25的数据。正常情况下,各驱动位的光伏主轴22的转向角度应保持基本一致,各处的角度差β应小于设置值β
(0)
(后者根据支架的不同参数例如选择为3-8
°
)
。
当控制器40检测出角度差β大于设置值β
(0)
时,控制器的驱动电路44通过pwm调节控制使各电机的运行速度稍有偏差,以实现各驱动位的光伏主轴22的旋转角度保持基本一致。而当所有电机最终停止时,各光伏主轴的角度差β应小于设置值β
(0)
。当出现角度差β大于β
(0),
且通过pwm调节无法变小时,控制器即判断系统出现驱动故障,停机并上传故障信号至上位机。
27.控制器40可以根据时间和经纬度计算太阳的当前位置,并结合光伏支架参数换算成光伏主轴应转向角度。控制器将读取的每个倾角传感器反馈的光伏主轴的实际转向角度与应转向角度进行对比,一旦发现两者之间的角度差α超过设置值α
(0)
,控制器即控制各电机调整动作,直到该角度差α小于设置值α
(0)
时停止调整。其中,设置值α
(0)
例如为1
°
。
28.以上所述仅仅是本实用新型的单轴多点联动光伏跟踪支架的若干实施例,根据本实用新型的上述构思,本领域的技术人员还可以对此作出各种变化和变换,但是这些变化和变换均属于本实用新型的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1