一种用于超低温环境轨道巡检机器人的自动充电装置的制作方法
1.本实用新型涉及轨道巡检机器人技术领域,具体涉及一种用于超低温环境轨道巡检机器人的自动充电装置。
背景技术:
2.随着科学技术的进步,巡检机器人代替人工巡检已经在煤矿逐步普及应用。机器人在巡检过程中对被检设备有很强的针对性,巡检质量和效果优于人工巡检,对于煤矿的“减员提效”工作有着巨大的推动作用,促使煤矿对于设备的需求从单纯的自动化需求向自动化+智能化需求方向转变。
3.目前,我国已建设了很多露天煤矿,统计资料显示,国内大部分露天煤矿分布在内蒙古、新疆等北方地区。随着煤炭需求量的不断增长,大型露天煤矿的改扩建也在不断增加,而露天矿煤炭的运输主要依靠皮带来完成,因此皮带运输设备在露天矿的应用越来越广,相应的皮带巡检也给工人带来了很大的工作量。由于新疆、内蒙古的特殊气候条件,夏季与冬季温差较大,最低气温-40℃以下,最高气温40℃以上。而且大多数运输皮带依山而建,最大坡度可达25
°
,由于露天矿没有相应的防护,冬季下雪结冰,夏季高温暴晒,普通巡检机器人不能适应如此恶劣的环境条件。
4.因此,需要研制可在低温露天环境下工作的智能巡检机器人,来满足露天矿现场的巡检应用。作为巡检机器人的重要组成部分,电池及其充电系统成为了关键。由于锂电池不能在0℃以下的环境充电,而且低温环境下放电效率会明显降低,因此,需要一种能够工作于露天低温环境下的锂电池及充电系统,而且该系统还要适用于巡检机器人的移动特性和智能化特性。
5.已有技术中,专利号为cn214589096u的
ꢀ“
一种锂电池低温自动充电装置”实用新型专利实现了低温环境的自动充电,但是应用于巡检机器人这种移动设备时,缺乏相应的自动充电机构和保障安全的传感器,同时更不具备与之相匹配的智能控制算法。
技术实现要素:
6.为解决上述技术问题,本实用新型提供了一种用于超低温环境轨道巡检机器人的自动充电装置,该充电装置可工作在-40℃的超低温环境,当巡检机器人内部的电池组电量低于设定值时,机器人自动运行至充电位置进行充电,实现超低温环境下的不依赖外部条件的全自动充电。
7.本实用新型采用的技术方案是:一种用于超低温环境轨道巡检机器人的自动充电装置,包括充电器箱、充电机构、轨道和轨道巡检机器人,充电器箱安装固定于轨道上,与充电机构电气连接。
8.所述充电机构包括:受电触头、充电滑轨固定架、充电滑轨、锂电池组、受电端控制模块、电池端到位传感器固定架、充电器端到位传感器、电池端到位传感器和充电器端到位传感器固定架。
9.所述充电机构的充电滑轨固定架安装固定于轨道上,充电滑轨、充电器端到位传感器和充电器端到位传感器固定架安装固定于充电滑轨固定架上。
10.所述受电触头、受电端控制模块、锂电池组、电池端到位传感器固定架、电池端到位传感器安装于轨道巡检机器人上。
11.充电机构的作用是实现充电器箱端的充电回路与锂电池组端的受电回路可靠连接,构成完整的充电回路,同时提供充电滑轨和充电器端到位传感器的安装位置。
12.充电器箱的作用是将外供电源转化为锂电池组适用的电压为锂电池组充电,且能够通过充电器端到位传感器检测机器人是否到达充电位置,机器人到达充电位置后闭合充电回路释放电能,否则不会放电,从而保证充电器充电回路与锂电池组受电回路接通过程中不带电,进而不会产生火花,使充电更安全。充电器箱还具备自动加热功能,当温度低于设定值时,则开启加热,加热到设定值时,则停止加热。
13.电池端到位传感器安装于电池端到位传感器固定架上,受电端控制模块通过电池端到位传感器的信号判断巡检机器人是否移动到充电位置;所述锂电池组内部包括电池组温度传感器和电池组加热模块,受电控制模块分别与锂电池组、受电触头和电池端到位传感器连接。巡检当机器人运行到充电位置时,受电触头与充电滑轨可靠接触,此时,电池端到位传感器检测到机器人到达充电位置,受电端控制模块将受电回路接通,在充电之前判断温度是否满足充电要求,若低于设定的阈值,则先进行加热,等待温度升高到设定温度后再进行充电,其中,加热所需的电能来自于充电器箱,不消耗电池能量。
14.本实用新型的有益效果是:
15.1.超低温环境适应性
16.本实用新型通过为充电器和锂电池组内部增加加热模块,解决了锂电池组不能在0℃以下充电的问题,通过温度采集模块对环境温度的感知,进一步地利用加热模块控制充电器和锂电池组的温度,使锂电池组的充电环境始终维持在一个适合充电的温度范围,保证了锂电池充电过程的安全性,也延长了锂电池组的使用寿命。
17.2.充电端与受电端的自适应对接
18.本实用新型实现了移动的巡检机器人的受电触头与充电器端固定的充电滑轨的自适应对接,从而实现了充电过程的无人值守,实现自动充电。
19.3.充电端与受电端的无电对接
20.本实用新型利用到位检测传感器实时检测机器人及充电机构的相对位置,只有当充电端到位传感器检测到机器人、受电端到位传感器检测到充电机构之后,整个充电回路才被接通,充电滑轨和受电触头之间才会有电流流过,否则不带电;且在机器人到达充电位置之前,充电滑轨和受电触头已经可靠连接,这样能够保证在整个充电过程中不会产生电火花,不会引燃周围环境中的易燃易爆物质,进一步提高了充电装置的安全性。
附图说明
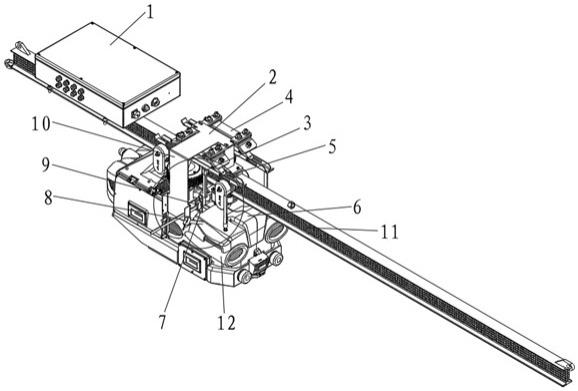
21.图1是本实用新型的组成结构图;
22.图2是本实用新型传感器安装部分示意图;
23.图3是本实用新型传感器安装局部放大图。
具体实施方式
24.下面结合附图与具体实施方式对本实用新型作进一步详细描述。
25.如图1-2所示,一种用于超低温环境轨道巡检机器人的自动充电装置,包括充电器箱1、充电机构2、轨道11和轨道巡检机器人12,充电器箱1安装固定于轨道11上,与充电机构2电气连接。
26.充电机构2包括:受电触头3、充电滑轨固定架4、充电滑轨5、锂电池组6、受电端控制模块、电池端到位传感器固定架7、充电器端到位传感器8、电池端到位传感器9和充电器端到位传感器固定架10。
27.充电机构2的充电滑轨固定架4安装固定于轨道11之上,充电滑轨5、充电器端到位传感器8和充电器端到位传感器固定架10安装固定于充电滑轨固定架4上。
28.受电触头3、受电端控制模块、锂电池组6、电池端到位传感器固定架7、电池端到位传感器9安装于轨道巡检机器人12上。其中,受电端控制模块采用stm32f107vct芯片。
29.充电机构2的作用是实现充电器箱1端的充电回路与锂电池组6端的受电回路可靠连接以构成完整的充电回路,同时提供充电滑轨5和充电器端到位传感器8的安装位置。
30.如图2所示,充电器端到位传感器8以特定的角度安装于充电器端到位传感器固定架10上,要求充电器端到位传感器8正对轨道巡检机器人本体,当机器人行驶到检测区域时,能够检测到机器人。充电器箱1的作用是将外供电源转化为锂电池组6适用的电压为锂电池组6充电,且能够通过充电器端到位传感器8检测机器人是否到达充电位置,巡检机器人到达充电位置后闭合充电回路释放电能,否则不会放电,从而保证充电器箱1充电回路与锂电池组6受电回路接通过程中不带电,从而不会产生火花,使充电更安全。充电器箱1还具备自动加热功能,当温度低于设定值时,则开启加热,加热到设定值时,则停止加热。
31.如图3所示,电池端到位传感器9以特定角度安装于电池端到位传感器固定架7上,安装时保证传感器能够检测到充电器端到位传感器固定架10,受电端控制模块通过电池端到位传感器9的信号判断机器人是否移动到充电位置;电池端到位传感器固定架7和受电触头3垂直安装于轨道巡检机器人12特定位置;锂电池组6内部包括电池组温度传感器和电池组加热模块,受电控制模块分别与锂电池组6和受电触头3连接,受电端控制模块与电池端到位传感器9通过控制线连接。当机器人运行到充电位置时,受电触头3与充电滑轨5可靠接触,此时,电池端到位传感器9检测到巡检机器人到达充电位置,受电端控制模块将受电回路接通;在充电之前判断温度是否满足充电要求,若低于设定的阈值,则先进行加热,等待温度升高到设定温度后再进行充电。
32.本实用新型的工作过程是:当巡检机器人靠近自动充电装置时,充电器箱1通过充电器端到位传感器8检测巡检机器人是否到达充电位置。若已经到达,此时受电触头3与充电滑轨5可靠接触,充电器端到位传感器8检测到巡检机器人到达充电位置后,闭合充电回路释放电能,此时充电滑轨5带电。锂电池组6内部具有电池组温度传感器和电池组加热模块,当电池端到位传感器9检测到巡检机器人到达充电位置后,首先判断温度是否满足锂电池组6充电的温度条件,若满足,则闭合受电回路;若不满足,则开启电池组加热模块加热,直到温度条件满足后再闭合受电回路进行充电。电池组6加热模块电能来自于充电器箱1,不消耗电池组6的能量。充电器箱1同时具备自动加热功能,内部设有控制模块和加热模块,控制模块根据温度值确定是否启动加热模块进行加热,当温度低于设定的低温阈值时,则
开启加热,加热到设定值时,则停止加热。
33.本实用新型并不限于具体实施方式的实施例,只要是本领域技术人员根据本实用新型方案得到的其他实施方式,同样属于本实用新型的技术创新及保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1