一种谐波磁场驱动电励磁电机的制作方法
1.本实用新型涉及一种电机,特别涉及一种谐波磁场驱动电励磁电机。
背景技术:
2.电机作为将电能转化为旋转机械能的装置,在我们的社会生产和生活中起着极为重要的作用。传统电励磁电机控制方便、装配性好,控制励磁电流就可控制磁场强度,达到调速的目的,可靠性高,通常用于大功率场合,其结构相对复杂,生产工艺严密,经久耐用,是传统电励磁电机的优势。尽管传统电励磁电机有诸多优势,然而相较于永磁电机的节能效果及生产成本和外形体积还是有所逊色。因此,迫切需要设计一种谐波磁场驱动电励磁电机。
技术实现要素:
3.本实用新型所要解决的技术问题是为了针对上述现有技术的不足而提供一种谐波磁场驱动电励磁电机,使其能够减小体积,提高功率密度,达到节能的效果。
4.本实用新型解决上述存在的问题所采用的技术方案为:一种谐波磁场驱动电励磁电机,其包括:转子组件、定子组件、控制模块和线束,所述线束与控制模块通过焊接连接,控制模块通过定位柱和弹性固定卡固定于所述定子组件,线束穿过定子组件设置的径向孔并从轴向孔中引出,定子组件设置的轴承对转子组件起支撑和定位作用,谐波磁场驱动电励磁电机通电转子组件沿圆周方向旋转,主要结构表述如下:
5.a.定子上设置若干个齿槽,槽数为z;
6.b.在定子圆周360
°
机械空间上,定子绕组按照设定的连接规律分为m相;
7.c.带定子绕组的定子组件,其任意一相绕组通以直流恒定电流,在定子圆周360
°
机械空间上,形成的相绕组磁场极对数为pm;
8.d.每相定子绕组包含的线包个数为k=n
×
pm (n=1,2,3
…
),采用单层绕组;
9.e.通过励磁绕组实现转子极靴磁极在圆周方向上按照n极和s极顺序进行依次排列,沿着转子圆周360
°
机械空间上,形成的转子极靴磁极对数为pr;
10.f.在定子和转子之间的圆周360
°
机械空间内形成电机气隙;
11.所述转子极靴磁极对数pr必须满足: pr = z
±
pm,其中,定子槽数z:z=2
×m×
k。
12.本实用新型实施例设计为定子槽数z=12,转子极靴磁极对数pr=13,每相线包极对数pm=1 , 每相线包数k=2。
13.更具体地,对本实用新型谐波磁场驱动电励磁电机作进一步说明:
14.谐波磁场驱动电励磁电机的原理:
15.a.无论作为bldc控制或pmsm控制,电机转子转动的必要条件是定子绕组在电机气隙中产生的磁场极对数与转子极靴磁极对数相等;
16.b.定子绕组通电后,在电机气隙中产生基波磁动势,在定子齿槽磁导的作用下,沿气隙空间分布一系列的谐波磁场;
17.c.当特定的气隙谐波磁场的极对数等于转子极靴磁极对数pr时,则会输出稳定的电磁力矩。
18.为满足谐波磁场驱动电励磁电机的原理,必须符合以下条件:
19.a.谐波磁场驱动电励磁电机转子极靴磁极对数pr必须满足:z
±
pm=pr,具体表述如下:
20.①
根据安培环路定律:∑h
×
l=w
×
i=f,其中,h—磁场强度,l—磁路长度,w—线圈匝数,i—线圈电流,f—磁动势;
21.②
在电机磁场闭合回路中,主要经过铁磁物质和电机气隙形成闭合,故电机安培环路定律表示为:h(δ)
×
l(δ)+h(铁磁)
×
l(铁磁)=w
×
i=f,由于铁磁物质中,h(铁磁)很小可以约等于零,故h(δ)
×
l(δ)=w
×
i=f;
22.③
磁感应强度b与磁场强度h的关系为:b=μ
×
h,其中,μ—相对导磁率;
23.④
故f=wi=b(δ)
×
l(δ)/μ0,其中,μ0—空气相对导磁率;
24.⑤
电机气隙磁感应强度可以表示为:b(δ)=f
×
μ0/l(δ)=f
×
ʌ
(δ),其中,
ʌ
(δ)—电机气隙磁导,气隙越小,磁导越大;
25.⑥
磁动势f在电机气隙中空间分布为矩形波,根据傅里叶级数可以表示为:f(α)=(2/π)
×f×
[sin(pm
×
α)+(1/3)
×
sin(3
×
pm
×
α)+
…
+(1/n)
×
sin(n
×
pm
×
α)],其中,n=1,2,3...,α—表示沿着气隙圆周方向的机械空间角度,可见,磁动势的基波幅值最大,基波磁动势表达式为:
[0026]
f1(α)=(2/π)
×f×
sin(pm
×
α)=(2
×
wi/π)
×
sin(pm
×
α);
[0027]
⑦
电机气隙齿磁导
ʌ
δ在空间分布近似矩形波,根据傅里叶级数可以表示为:
[0028]
ʌ
δ(α)=
ʌ
0+
ʌ1×
cos(z
×
α)+
ʌ2×
cos(2
×z×
α)+
…
+
ʌn×
cos(n
×z×
α),其中,
[0029] n=1,2,3...,基波磁导幅值最大,其表达式为:
ʌ
δ1(α)=
ʌ
0+
ʌ1×
cos(z
×
α);
[0030]
⑧
定子绕组基波磁动势在定子齿磁导的调制下,在电机气隙中沿空间分布产生的磁感应强度表达式:
[0031]
b(α)=f
×
ʌ
(δ)=(2
×
wi/π)
×
sin(pm
×
α)
×
[
ʌ
0+
ʌ1×
cos(z
×
α)]
[0032]
=bm0
×
sin(ps
×
α)+bm1
×
sin(pm
×
α)
×
cos(z
×
α),其中,
[0033]
bm0=2
×
wi
×
ʌ
0/π,bm1=2
×
wi
×
ʌ
1/π,利用三角公式定理:sin(a)
×
cos(b)=[sin(a+b)+sin(a-b)]/2,将上述公式进行变化,得出:
[0034]
b(α)=bm0
×
sin(pm
×
α)+(bm1/2)
×
sin[(z+pm)
×
α]+(bm1/2)
×
sin[(z-pm)
×
α]
[0035]
由上式可见,由定子相绕组通电产生的基波磁动势可以在电机气隙中产生以下三种磁场:
[0036]
a.极对数为pm的基波磁动势磁场,该磁场性质相当于定子没有开槽而形成的磁场;
[0037]
b.极对数为(z+pm)的齿谐波磁导磁场,该磁场性质是相当于基波磁动势被定子齿槽调制后形成的磁场;
[0038]
c.极对数为(z-pm)的齿谐波磁导磁场,该磁场性质是相当于基波磁动势被定子齿槽调制后形成的磁场。
[0039]
⑨
谐波磁场驱动电励磁电机的转子极靴磁极对数pr选择:
[0040]
a.根据电机运行基本原理,只有转子极靴磁极对数和定子线圈形成的磁极对数相
等时,电机才会输出稳定的电磁力矩;
[0041]
b.根据上述原理,谐波磁场驱动电励磁电机的转子极靴磁极对数pr必须满足:z+pm=pr或z-pm=pr。
[0042]
b.谐波磁场驱动电励磁电机定子槽数z的选择:z=2
×m×
k,具体表述如下:
[0043]
每个线包有上下2个元件边,每个定子槽为单层绕组即一个定子槽只放置一个元件边,每相绕组包含k个线包,电机分为m相,则电机定子槽数z需满足:z=2
×k×
m,采用单层绕组。
[0044]
c.谐波磁场驱动电励磁电机每相线包个数k和每相线包形成磁极对数pm的关系:k=n
×
pm,其中,n=1,2,3
…
,具体表述如下:
[0045]
从电磁场原理可知,1个线包只能形成1对极磁场,所以线包个数k≥线包磁极极对数pm。在电机气隙圆周360
°
机械空间上,考虑到气隙磁场幅值对称的原则:形成1对极的线包个数可以是1,2,3,
…
;形成2对极的线包个数可以是2,4,6,
…
;形成3对极的线包个数 可以是3,6,9,
…
;形成pm对极的线包个数为:k=n
×
pm,其中n=1,2,3
…
。
[0046]
根据原理条件,当采用三相(m=3)绕组结构,谐波磁场驱动电励磁电机的定子槽数/转子极靴磁极对数/每相线包数组合如下表:
[0047][0048]
谐波磁场驱动电励磁电机的控制方式:适用于bldc控制方式和pmsm控制方式,其中bldc为方波电压(电流)驱动方式,pmsm为正弦波电压(电流)驱动方式。
[0049]
谐波磁场驱动电励磁电机提升功率体积密度的原理:
[0050]
a.电励磁电机的基本评价指标:电机作为旋转机械装置,不可避免的会产生振动噪音,而电机齿槽力矩脉动是引起电机振动噪音的重要根源,故电机在追求功率体积密度(瓦/每升)到极致的同时,也必须同时降低齿槽力矩脉动,保证电机振动噪音在合理范围内,这样提升功率体积密度才有实际意义;
[0051]
b.提升电励磁电机功率体积密度的主要手段:a.优化电机磁路:提升效果有限;b. 减少电机定子和转子间的气隙值:基本上气隙磁场幅值与气隙值成反比,故提升效果明显;
[0052]
c.减少电机气隙值对电机齿槽力矩脉动的负面影响:齿槽力矩幅值与气隙磁场幅值的平方成正比,故缩小电机气隙值会使得电机齿槽力矩脉动显著增加,导致电机振动噪 音也显著增加;
[0053]
d.降低电机齿槽力矩脉动幅值的有效方法:
[0054]
a.在维持固定的电机气隙值条件下,理论研究表明,降低电机齿槽力矩脉动的有效方法是增大电机齿槽力矩波动周期数(转子旋转一周齿槽力矩波动的周期个数),其中,波动周期数等于定子槽数和转子极靴磁极数的最小公倍数;
[0055]
b.谐波磁场驱动电励磁电机和传统电励磁电机在相同定子槽数条件下的波动周期数对比如下表:
[0056][0057]
从对比结果可以看出,在定子槽数相同的情况下,谐波磁场驱动电励磁电机与传统电励磁电机相比,谐波磁场驱动电励磁电机的齿槽力矩波动周期数大幅增加。
[0058]
更好地,所述极靴设置的磁轭左侧面、磁轭右侧面、磁轭上端面和磁轭下端面均进行绝缘处理,与励磁绕组之间起到绝缘作用。
[0059]
更好地,所述极靴所设置的磁轭左侧面、磁轭右侧面、磁轭上端面和磁轭下端面分别与励磁绕组的励磁绕组左侧、励磁绕组右侧、励磁绕组上侧和励磁绕组下侧配合,进行励磁绕组径向和轴向的定位。
[0060]
更好地,所述励磁绕组可通过设定绕线方式来控制励磁电流的方向以实现26个极靴的磁性按n极和s极交替排列分布。
[0061]
更好地,所述定子组件的电机轴上设置正极导电环、负极导电环,转子组件上设置正极导电片、负极导电片,电源正极和负极分别通过正极导电环及正极导电片和负极导电环及负极导电片给励磁绕组供电。
[0062]
更好地,所述正极导电环和负极导电环与电机轴之间设置有绝缘环,起到绝缘的作用。
[0063]
更好地,所述定子组件的电机轴上设置径向孔和轴向孔,线束穿过径向孔,从轴向孔引出。
[0064]
更好地,所述定子组件上设置弹性固定卡和定位柱对控制模块进行定位和固定,能提高控制模块定位精度并使其固定更加牢固可靠。
[0065]
还可以,所述谐波磁场驱动电励磁电机根据不用的用途,设计为外定子内转子结构,同样能达到与本专利实施例外转子内定子结构等同的性能和效果。
[0066]
与现有技术相比,本实用新型的优点在于:谐波磁场驱动电励磁电机通过设定的定子槽数和转子极靴磁极数的组合,大幅提升齿槽力矩波动周期数,可以在缩小谐波磁场驱动电励磁电机气隙值的同时,维持或降低谐波磁场驱动电励磁电机的齿槽力矩波动幅值,通过设定的定子绕线方式,使得定子产生的谐波磁场极对数等于转子极靴的磁极对数,形成稳定的电磁力矩输出,能够采用较小的谐波磁场驱动电励磁电机气隙,大幅提升气隙磁场强度,使谐波磁场驱动电励磁电机输出功率正比例提升,谐波磁场驱动电励磁电机的功率体积密度也同步正比例提升。与传统电励磁电机相比较,在输出功率相同的条件下,谐
波磁场驱动电励磁电机体积减少了一倍以上,意味着谐波磁场驱动电励磁电机重量也减少一倍以上,能明显节省电机材料的使用成本,提高功率密度,达到节能的效果,极大地提升了产品市场竞争优势。该谐波磁场驱动电励磁电机结构,可匹配传统的bldc和pmsm电机控制模块,控制方面具有较强的通用性。
附图说明
[0067]
图1是本实用新型实施例谐波磁场驱动电励磁电机的立体图。
[0068]
图2是本实用新型实施例谐波磁场驱动电励磁电机的分解示意图。
[0069]
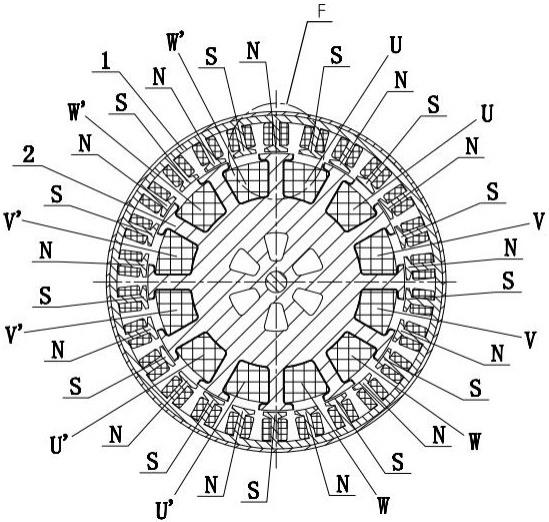
图3是本实用新型实施例谐波磁场驱动电励磁电机的结构示意图。
[0070]
图4是图3中a-a剖面图的局部视图。
[0071]
图5是图4中f的局部放大图。
[0072]
图6是本实用新型实施例转子组件的分解示意图。
[0073]
图7是图6中w的局部旋转放大图。
[0074]
图8是本实用新型实施例励磁绕组的立体图。
[0075]
图9是本实用新型实施例定子组件的分解示意图。
[0076]
图10是本实用新型实施例电机轴的剖视图。
具体实施方式
[0077]
下面结合附图及实施例对本实用新型作进一步描述。
[0078]
如图1、2所示,一种谐波磁场驱动电励磁电机,其包括转子组件1、定子组件2、控制模块3和线束4。谐波磁场驱动电励磁电机通电工作时通过转子组件1的旋转进行扭矩的输出,实现电能转换为机械能。
[0079]
如图3至图10所示,所述转子组件1由机壳11、转子12、励磁绕组13、正极导电片14和负极导电片15组成。
[0080]
所述转子12通过粘接剂粘接于机壳11内圆面。
[0081]
所述转子12在内圆上均匀设置26个极靴1201(13对极)。
[0082]
所述极靴1201设置的磁轭左侧面1202、磁轭右侧面1203、磁轭上端面1204和磁轭下端面1204均进行绝缘处理,与励磁绕组13之间起到绝缘作用。
[0083]
所述极靴1201所设置的磁轭左侧面1202、磁轭右侧面1203、磁轭上端面1204和磁轭下端面1204分别与励磁绕组13的励磁绕组左侧1301、励磁绕组右侧1302 、励磁绕组上侧1303和励磁绕组下侧1304配合,进行励磁绕组13径向和轴向的定位。
[0084]
所述励磁绕组13可通过设定绕线方式来控制励磁电流的方向以实现26个极靴1201的磁极按n极和s极交替排列分布。
[0085]
所述定子组件的电机轴211上设置正极导电环29、负极导电环2010,转子组件上设置正极导电片14、负极导电片15,电源正极和负极分别通过正极导电环29及正极导电片14和负极导电环2010及负极导电片15给上述励磁绕组13供电。
[0086]
所述正极导电环29和负极导电环2010与电机轴211之间设置有绝缘环2011,起到绝缘的作用。
[0087]
所述定子组件2的定子21在其外圆上均匀设置12个齿槽,每相线包极对数为1, 每
相线包数为2。
[0088]
所述定子组件2的外圆与转子组件1的极靴1201形成谐波磁场驱动电励磁电机气隙l,由于采用本实用新型技术方案,其可以减小。
[0089]
所述线束4与所述控制模块3通过焊接连接。
[0090]
所述定子组件2设置弹性固定卡212和定位柱213对控制模块3进行定位和固定,使控制模块3的固定更加牢固可靠。
[0091]
所述定子组件2的电机轴211上设置径向孔2111和轴向孔2112,以方便线束4穿过径向孔2111和从轴向孔2112通过,实现线束4的引出。
[0092]
所述定子组件2设置的轴承23、28固定于所述转子组件1的机壳11内,并对转子组件1起支撑和定位作用,谐波磁场驱动电励磁电机通电工作时转子组件可进行圆周方向旋转。
[0093]
所述定子组件2设置止位环25、26分别对轴承23、28进行固定,以实现对转子组件1进行轴向限位,设置的耐磨垫片24、27起到减小摩擦力的作用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1