一种单电机三工位机构用同步驱动装置的制作方法
1.本实用新型涉及电力设备操作机构技术领域,具体为一种单电机三工位机构用同步驱动装置。
背景技术:
2.单电机三工位机构为了表达不同的工作状态,都会在箱体外设置用于指示实时状态的指示球,以便操作人员能够获得机构的工作信息,现有的指示球通常需要单独连接驱动机构,在机构发生状态改变时,通过驱动机构能够带动指示球转动至相应位置,上述结构能够完成指示工作,但是如果驱动机构出现问题后,可能会出现指示球与机构的输出状态不匹配的问题。
技术实现要素:
3.为解决上述单电机三工位机构可能会出现机构输出状态与指示球不匹配的的问题,本实用新型提供了一种单电机三工位机构用同步驱动装置。
4.本实用新型技术方案如下:
5.一种单电机三工位机构用同步驱动装置,包括:
6.指示器,所述指示器能够随转动轴转动,且转动后的指示器能够表达不同的信息,常规情况下,所述指示器选用现有的指示球;
7.辅助开关,所述辅助开关的轴能够转动;
8.驱动机构,所述驱动机构包括能够转动的输出主轴和能够移动的驱动器,所述输出主轴及驱动器连接同一动力源,且由单个动力源同步驱动;
9.所述输出主轴用于连接外部元器件,所述驱动器能够驱动所述指示器的转动轴及辅助开关的轴同步转动。
10.通过上述结构,即可避免出现机构输出状态和指示球不同步的问题。
11.作为优选,所述指示器的转动轴与辅助开关的轴同心,便于直接连接。
12.在上述结构基础上,进一步的,所述驱动器为拨板,所述指示器的转动轴与辅助开关的轴同时套接固定有拨叉,所述拨板能够带动所述拨叉转动,直接将指示器与辅助开关同步驱动。
13.上述驱动机构的具体结构为,所述动力源(输出电机)连接有蜗杆,且能够带动所述蜗杆转动,所述蜗杆啮合连接有蜗轮,且能够带动蜗轮转动,所述蜗轮能够带动所述输出轴转动及带动驱动器移动。
14.实现同步带动驱动器及输出主轴的具体结构为,所述蜗轮设置有同心的第一主动齿轮和第二主动齿轮,所述驱动器设置与第一主动齿轮啮合的从动齿条,所述输出主轴设置与第二主动齿轮啮合的从动齿轮。
15.作为优选,所述第一主动齿轮和第二主动齿轮分别设置在蜗轮的两侧。
16.作为优选,所述从动齿条通过腰型孔与拨板固定,且从动齿条相对于第一主动齿
轮的间距能够调节,能够进行从动齿条的更换,且能够根据需求调节从动齿条相对于第一主动齿轮的间距。
17.实现驱动指示器转动的具体结构为,所述拨叉设置环形的齿牙,所述拨板在移动方向上设置条形的齿牙,且拨叉与拨板的齿牙啮合。
18.本实用新型的有益效果在于:本实用新型为一种单电机三工位机构用同步驱动装置,将原有的指示器和辅助开关连接,并同步驱动,避免出现因部分结构失效而导致的指示器与机构输出状态不匹配的问题,并且本装置采用的驱动机构中,利用了蜗轮蜗杆,能够有效避免因重力或者外在人为因素导致的指示器和辅助开关状态转换,确保只能由驱动机构驱动。
附图说明
19.通过阅读下文优选实施方式的详细描述,本技术的方案和优点对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本实用新型的限制。
20.在附图中:
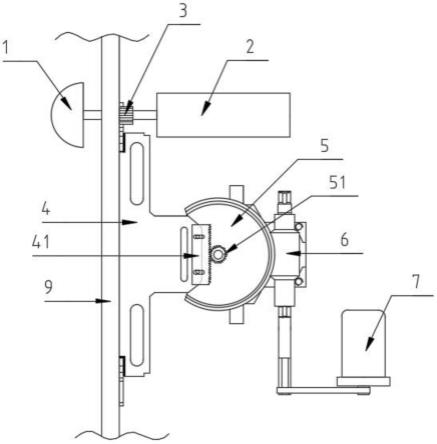
21.图1为本实用新型侧视结构示意图;
22.图2为本实用新型侧视结构示意图(不同观察位置);
23.图中各附图标记所代表的组件为:
24.1、指示球;2、辅助开关;3、拨叉;4、拨板;41、从动齿条;5、蜗轮;51、第一主动齿轮;52、第二主动齿轮;6、蜗杆;7、输出电机;8、输出主轴;81、从动齿轮;9、箱体。
具体实施方式
25.下面将结合附图更详细地描述本公开的示例性实施方式。需要说明,提供这些实施方式是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员,可以以各种形式实现本公开,而不应被这里阐述的实施方式所限制。
26.实施例
27.如图1、2所示的一种单电机三工位机构用同步驱动装置,包括指示器,所述指示器能够随转动轴转动,且转动后的指示器能够表达不同的信息,常规情况下,所述指示器选用现有的指示球1,即选用与现有结构相同即可,如果有额外需求,可以更换其他指示器;还包括辅助开关2,所述辅助开关2的轴能够转动,同样采用现有结构即可。上述两个结构在现有单电机三工位机构中也存在,但是并不同步,而本装置与现有结构区别即在于,通过下述结构实现上述两个结构的同步运行,以避免出现指示球1与机构状态不同步的问题。
28.且具体结构为:
29.所述驱动机构包括能够转动的输出主轴8和能够移动的驱动器,所述输出主轴8及驱动器连接同一动力源,且由单个动力源同步驱动。
30.进一步的,上述结构中,能够实现分别驱动转动和移动的结构为:
31.所述动力源(常规情况下为输出电机7)连接有蜗杆6,且能够带动所述蜗杆6转动,所述蜗杆6啮合连接有蜗轮5,且能够带动蜗轮5转动;之后,所述蜗轮5设置有同心的第一主动齿轮51和第二主动齿轮52,所述驱动器设置与第一主动齿轮51啮合的从动齿条41,在涡
轮5转动时,第一主动齿轮51转动时,从动齿条41即可在固定方向上移动,进而实现上述驱动器的移动功能;与此同时,所述输出主轴8设置与第二主动齿轮52啮合的从动齿轮81,通过两个齿轮间的啮合,即可实现在涡轮5转动的同时,通过第二主动齿轮52带动从动齿轮81的转动,进而实现输出主轴8的转动。
32.通过上述结构所示,即可看出,单个动力源可以同时完成对输出主轴8的转动驱动和驱动器的移动驱动;
33.并且在上述结构中,通过控制第一主动齿轮51和第二主动齿轮52相对于涡轮5的大小,即可实现对输出主轴8的转速调节或者驱动器移动速度的调节;
34.并且所述第一主动齿轮51和第二主动齿轮52分别设置在蜗轮5的两侧,避免结构出现交错而导致无法运行的情况。
35.最终,还能够凭借蜗轮5蜗杆6结构的特点,保证非蜗杆6驱动情况下,难以完成对涡轮5的转动,进而避免出现意外情况下对结构的影响。
36.之后,如图所示,在上述结构的基础上,进一步的,所述输出主轴8用于连接外部元器件,为单电机三工位机构的必要结构;所述驱动器能够驱动所述指示器的转动轴及辅助开关2的轴同步转动,完成所需功能。
37.且通过上述结构,即可避免出现机构输出状态和指示球1不同步的问题。
38.并且,为了便于完成对指示球1和辅助开关的同步驱动,所述指示器的转动轴与辅助开关2的轴同心,便于直接连接。
39.于此同时,如图所示,所述驱动器为拨板4,所述指示器的转动轴与辅助开关2的轴同时套接固定有拨叉3,所述拨板4能够带动所述拨叉3转动,直接将指示器与辅助开关2同步驱动。
40.进一步的,上述拨叉3及拨板4采用的具体结构为:所述拨叉3设置环形的齿牙,所述拨板4在移动方向上设置条形的齿牙,且拨叉3与拨板4的齿牙啮合,在拨板4发生移动时,即可实现带动拨叉3的转动。
41.最后,所述从动齿条41通过腰型孔与拨板4固定,且从动齿条41相对于第一主动齿轮51的间距能够调节,能够进行从动齿条41的更换,且能够根据需求调节从动齿条41相对于第一主动齿轮51的间距,并且,在从动齿条41出现问题时,还能够更换。
42.在上述结构设置后,即可完成常规单电机三工位机构的正常工作,且流程为:输出电机7转动,进而带动蜗杆6转动,蜗杆6转动过程中,带动与之啮合的涡轮5转动,涡轮5在转动中,第一主动齿轮51和第二主动齿轮52均能够转动,且分别用于:第一主动齿轮51转动,带动与之啮合的从动齿条41移动,如图所示,在从动齿条41向上移动过程中,能够带动与之固定的拨板4向上移动,进而带动拨叉3转动,最终带动指示球1和辅助开关2同步转动;第二主动齿轮52转动,带动与之啮合的从动齿轮81转动,进而带动输出主轴8转动,连接外部结构后,即可正常发挥功能。
43.并且,可以看出,上述结构中,除指示球1和输出主轴8外,其他结构均位于箱体9内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1