一种三相六极制直线磁阻电机的制作方法
1.本发明涉及非接触直线驱动技术领域,特别是一种三相六极制直线磁阻电机。
背景技术:
2.20世纪70年代以来,随着科学技术的迅猛发展和由此产生的巨大需求,步进电动机、晶闸管无换向器电动机、永磁材料及其它新材料制作的电动机等不断研制和推出。开关磁阻电动机将新的电动机构造与现代电子控制技术融为一体,以其结构简单、运行可靠和快响应、高效率的优良特性,成为交流电动机驱动系统、直流电动机驱动系统及无刷直流电动机驱动系统的强有力的竞争者,已引起国内外电机工程学界的关注。目前已研制出各种型式的开关磁阻电动机产品,它们试用于车辆牵引、机床驱动、航天器械、风机调控、家用电器等领域,发展前景广阔,很可能成为其它电动机的换代产品之一。
3.开关磁阻电动机不同一般磁阻电动机,它是经过变革的一种很有生命力的新型的驱动系统,是磁阻电动机和电力电子开关电路相结合而产生的一种机电一体化的新设备。开关磁阻电动机(简称sr电动机或srm)与磁阻电动机有质的区别。sr电动机,其定子、转子都是凸极结构,定子上有最简单的集中绕组,转子上没有绕组,也没有换向器、滑环等。sr电动机是根据转子位置采用简单的控制方式来导通和断开定子电路的电流而产生转矩的,它通过适当的措施,可以得到范围很宽的各种机械特性。由于sr电动机定子绕组电流的单向性,控制回路比异步电动机的控制回路简单,具有最少数目的开关设备。因此,这种系统能实现高精度、快响应、高效率及高输出的性能指标。尽管开关磁阻电机电磁原理和结构都相当简单,但磁路周期性变化并存在严重的局部饱和,其设计和性能分析与传统电机差异较大,工程设计人员往往面临无从入手的困难。
技术实现要素:
4.本实用新型的目的是提供一种三相六极制直线磁阻电机,具有结构简单、造价低、低能耗、速度特性好等优点。
5.实现本实用新型目的的技术方案如下:
6.一种三相六极制直线磁阻电机,包括齿槽型电机次极单元,极靴型电机初极单元和传感器单元;所述齿槽型电机次极单元包括铁质平板和若干等宽的铁质齿,铁质齿等间距地布置在铁质平板上形成齿、槽,且齿、槽的宽度相等;所述极靴型电机初极单元包括相同的1号电磁铁、2号电磁铁、3号电磁铁、4号电磁铁、5号电磁铁和6号电磁铁,还包括电机驱动控制器;所述电磁铁包括凹形极板,凹陷处为电磁铁芯并缠绕线包,线包连接到电机驱动控制器;凹形极板的左、右上端分别设置左、右极靴板,左、右极靴板的宽度均等于齿槽型电机次极单元的齿的宽度;所述1号电磁铁、2号电磁铁、3号电磁铁、4号电磁铁、5号电磁铁和6号电磁铁按左、右顺序等间距布置,且间距为左极靴板宽度的三分之一;所有电磁铁的左、右极靴板的上表面贴近齿槽型电机次极单元的齿的下表面;所述1号电磁铁和4号电磁铁共同构成极靴型电机初极单元的第一相,2号电磁铁和5号电磁铁共同构成极靴型电机初极单
元的第二相,3号电磁铁和6号电磁铁共同构成极靴型电机初极单元的第三相;所述传感器单元包括齿槽型被测片和识别传感器;齿槽型被测片的齿、槽与电机次极单元的齿、槽宽度相等,布置在电机次极单元的侧面,且错位六分之一齿的宽度;识别传感器包括连接到电机驱动控制器的三路探头,三路探头等间距布置,其间距为左极靴板宽度的三分之二;识别传感器用于识别齿槽型被测片的齿、槽。
7.本实用新型的有益效果在于,能实现无接触式直线驱动,结构简单,便于防护,启动电流小,转矩大,可靠性高。
附图说明
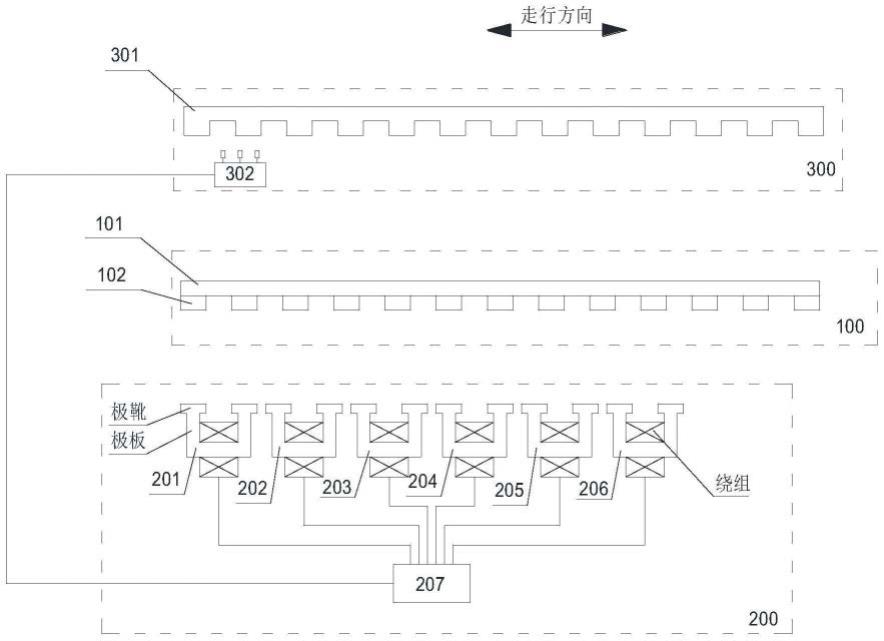
8.图1是电机结构示意图。
9.图2是电机三维结构示意图。
10.图3是电磁铁基本单元结构示意图。
11.图4电磁铁编号定义示意图。
12.图5(a1)、图5(a2)、图5(b1)、图5(b2)、图5(c1)、图5(c2)是驱动齿条往左走行原理示意图。
13.图6(a1)、图6(a2)、图6(b1)、图6(b2)、图6(c1)、图6(c2)是驱动齿条往右走行原理示意图。
具体实施方式
14.如图1和图2所示,一种三相六极制直线磁阻电机,包括齿槽型次极单元100,极靴型电机初极单元200和传感器单元300。将需要通电的电机初极200和需要通电的识别传感器302布置在电机初极侧,将不需要通电的电机次极单元100和齿条形被测片301布置在次极侧上。实施例中,电机初极单元200静止不动,电机次极单元100在受到电磁力后实现运动,电机次极单元100的长度与齿条形被测片301的长度相等,且设置错位。
15.采用本实用新型可以实现非接触式运动,其构成电机初极的编组型电磁铁单元内的各个电磁铁均为同一种电磁铁。如图3所示,实施例中,构成电机初极的单个电磁铁采用了一种带极靴式电磁铁,其具体尺寸见下表:
16.参数名称参数值参数名称参数值电磁铁深度120mm最大工作电流5a槽深30mm绕组匝数850槽宽30mm最大工作间隙5mm极靴宽度30mm驱动齿条齿宽30mm极靴厚度10mm驱动齿条槽宽30mm极板宽度20mm铜线直径0.8mm铁芯宽度20mm位置感应片齿宽30mm
ꢀꢀ
位置感应片槽宽30mm
17.以该极靴型电磁铁为基本单元,用6个电磁铁编组构成一个编组电磁铁单元,作为直线开关磁阻驱动电机的初极,其电磁铁定义如图4所示,以铁质齿102阵列为参考,定义1号电磁铁201和4号电磁铁204的两个极靴刚好与铁质齿阵列中的两个齿正对,即齿与齿正
对,槽与槽正对;2号电磁铁202和5号电磁铁205的两个极靴相对铁质齿错位三分之二个齿,即20mm,3号电磁铁203和6号电磁铁206的两个极靴相对铁质齿错位三分之二个齿,即20mm,跟2号、5号电磁铁错位的方向恰好相反。6个依次等间距布置的电磁铁共同组成了一个三相电机初级单元,1号与4号电磁铁为一相,2号与5号电磁铁为一相,3号与6号电磁铁为一相。在同一时间内,初级单元中只有一相在工作,其它两相不导通电流,形成单相工作制。
18.在电机次极运动过程中,各电磁铁与铁质齿的对应关系会动态变化。电机驱动控制器根据识别传感器提供的数据,分析正出处于错位状态下的电磁铁,并根据运行方向的需求,确定具体需要通电的电磁铁,进而导通该电磁铁并提供合适大小的电流,产生的电磁力会促使电机初极和次极间产生相对运动,随着运动,各电磁铁跟次极间的位置关系会变化,电机驱动控制器根据识别传感器提供的实时数据,对六个电磁铁切换控制,实现运动的持续,即电机初级单元中各电磁铁的通电顺序由驱动控制器根据位置传感器和运行方向的信息进行控制。
19.实施例中的识别传感器302采用了光电传感器形式,配置了三路等间距光电对射探头,如图5(a1)所示,相邻探头的间隔为铁质齿宽的三分之二,识别传感器302各探头与齿条形被测片301相互作用,齿条形被测片301的材料为不锈钢,齿宽30mm,槽宽30mm,厚度为1.5mm。齿条形被测片301与电机次极单元100错位齿宽的六分之一。探头对应齿的部分时将产生高电平信号,在对应槽的部分将产生低电平信号,驱动控制器207根据识别传感器302上传的信息来控制各电磁铁的通断电及电流大小。
20.在图5(a1)所示的初始位置情况下,根据磁阻电机的原理,此时如果想让电机次极固定不动,则只需要使符合正对关系的3号电磁铁203和6号电磁铁206持续通电流即可。如果想让电机次极往左行走,将3号电磁铁203和6号电磁铁206断电,此时1号、3号探头对应齿条形被测片301齿的部分产生高电平信号,引导驱动控制器207只给满足错位关系的1号电磁铁201和4号电磁铁204通电,使电机次极往左运动;在电机次极继续往左走行的过程中,齿条形被测片301齿也在往左移动,随着移动,3号探头的输出将变成低电平信号,而1号探头的输出仍为高电平信号,此时继续引导驱动控制器207只给满足错位关系的1号电磁铁201和4号电磁铁204通电,继续使电机次极往左运动,如图5(a2)所示;在电机次极继续往左走行的过程中,1号探头的输出仍为高电平信号,而2号探头的输出将变成高电平信号,进而引导驱动控制器207只给满足错位关系的2号电磁铁202和5号电磁铁205通电,继续使电机次极往左运动,如图5(b1)所示;在电机次极继续往左走行的过程中,1号探头输出变为低电平信号,而2号探头的输出仍为高电平信号,此时继续引导驱动控制器205只给满足错位关系的2号电磁铁202和5号电磁铁205通电,使电机次极往左运动,如图5(b2)所示;在电机次极继续往左走行的过程中,2号探头的输出仍为高电平信号,而3号探头的输出变成高电平信号,进而引导驱动控制器207只给满足错位关系的3号电磁铁203和6号电磁铁206通电,继续使电机次极往左运动,如图5(c1)所示;在电机次极继续往左走行的过程中,2号探头输出变为低电平信号,而3号探头的输出仍为高电平信号,此时继续引导驱动控制器207只给满足错位关系的3号电磁铁203和6号电磁铁206通电,使电机次极往左运动,如图5(c2)所示。这样循环往复,即可实现电机次极一直向左运动。
21.如果在初始位置想使电机次极往右行走,则识别传感器302的换一种逻辑方式,即1号和3号探头输出高电平或只有3号探头输出高电平时,只导通2号和5号电磁铁;2号和3号
探头输出高电平或只有2号探头输出高电平时,只导通1号和4号电磁铁;1号和2号探头输出高电平或只有2号探头输出高电平时,只导通3号和6号电磁铁。电机次极往右行走的原理可以参考前述电机往左行走的原理。如图6(a1)、图6(a2)、图6(b1)、图6(b2)、图6(c1)、图6(c2)所示。
22.实施例提供的直线开关磁阻电动机,可以实现的最大推力为150牛。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1