一种光伏清扫机器人的制作方法
1.本实用新型涉及光伏清扫机器人技术领域,特别涉及一种光伏清扫机器人。
背景技术:
2.太阳能光伏电池需要保持表面一定的清洁度,才能有较好的太阳能辐射获取。大型光伏发电厂遭遇雨雪沙尘后,电池面板表面会堆积灰尘、污渍等影响光照的杂物。需要对光伏电池表面进行清扫。
3.目前的光伏电厂光伏面板采用固定在光伏面板上的清扫装置进行清洗,固定式清扫装置需要在每个光伏面板阵列上都需要安装一个,当光伏阵列巨大时,需要的固定式清扫装置就多,清扫成本高,而且每个光伏面板阵列不需要每天清扫;采用移动式光伏清扫车内燃机动力和液压或气压驱动机械臂直接到达清扫位置进行清扫,此种方式较为方便成本也较低。
4.现有的移动式光伏清扫车的机械臂为关节式机械臂,关节式机械臂自重较大,对装载移动平台要求较高;工作时要求地面平整度较高,当地面不平,车身与光伏面板的位置发生变化时,关节式机械臂在重新定位运动过程中,其移动定位难度较大,而且液压、气压装置响应速度较慢,清扫装置运动不及时可能会碰撞光伏面板发生事故。此外,在野外长期工作环境下,液压系统及气动系统维护需要频繁定期维护,给运营维修人员带来极大不便。
技术实现要素:
5.本实用新型提供一种光伏清扫机器人,可以分别调节清扫装置的高度与水平距离,当车身在起伏的地面移动时,清扫装置可以良好在清扫光伏面板上工作。
6.本实用新型提供了一种光伏清扫机器人,包括:
7.行走机构、升降机构、伸缩机构和清扫组件,升降机构包括第一驱动组件和移动件,伸缩机构包括第二驱动组件和工作臂,第一驱动组件及第二驱动组件均为电驱动;
8.第一驱动组件连接于行走机构,以带动第一驱动组件在地面行走,移动件连接于第一驱动组件,以带动移动件沿竖直方向上下移动,第二驱动组件连接于移动件,工作臂连接于第二驱动组件,以带动工作臂沿垂直于移动件移动方向进行移动,清扫组件转动连接于工作臂,清扫组件用于对光伏板的板面进行清扫。
9.可选的,行走机构为履带式行走机构,履带式行走机构上端连接有底板支架,底盘支架上端连接有底板,底板与升降机构之间连接有转动机构,转动机构带动升降机构在平行于底板板面的平面内转动。
10.可选的,转动机构包括:第一旋转电机、底盘和滚轮;
11.第一旋转电机连接于底板上,第一旋转电机的输出轴竖直向上,底盘固定于第一旋转电机的输出轴,以使底盘绕水平面内转动,底盘与底板之间连接有滚轮。
12.可选的,第一驱动组件包括第二旋转电机、第一固定套筒及第一丝杆套筒,移动件包括第一丝杆;
13.第二旋转电机固定于行走机构上,第一固定套筒固定于行走机构,第一固定套筒沿竖直方向延伸,第一丝杆套筒位于第一固定套筒内,第一丝杆套筒连接于各第二旋转电机的输出轴,以带动第一丝杆套筒转动,第一丝杆螺接于第一丝杆套筒,第一丝杆沿第一固定套筒的延伸方向与第一固定套筒滑动配合,伸缩机构连接于第一丝杆。
14.可选的,第二驱动组件包括:第二固定套筒、第三旋转电机、第二丝杆套筒及第二丝杆;
15.第二固定套筒沿垂直于第一丝杆的方向连接于第一丝杆,第三旋转电机固定于第二固定套筒内,第三旋转电机的输出轴沿垂直于第一丝杆的方向延伸,第二丝杆套筒位于第二固定套筒内,第二丝杆套筒沿第二固定套筒的轴向延伸,第二丝杆套筒连接于第三旋转电机,以带动第二丝杆套筒转动,第二丝杆螺接于第二丝杆套筒,工作臂连接于第二丝杆,工作臂或第二丝杆与第二固定套筒沿第二固定套筒的延伸方向滑动配合,以带动工作臂沿第二固定套筒的延伸方向往复移动。
16.可选的,第二旋转电机、第一固定套筒及第一丝杆套筒均为多个且数量相同,多个第二旋转电机并排固定于行走机构上,第一丝杆套筒一一对应的连接于各第二旋转电机的输出轴,第一丝杆一一对应的螺接于各第一丝杆套筒,第二固定套筒同时连接于多个第一丝杆的末端。
17.可选的,清扫组件通过连接组件转动连接于工作臂。
18.可选的,连接组件包括:支座和第四旋转电机;
19.支座连接于工作臂,第四旋转电机固定于支座上,清扫组件连接于第四旋转电机的输出轴,以使清扫组件在竖直面内转动。
20.可选的,清扫组件包括清扫滚筒。
21.可选的,底板上固定有为机器人供电的电池箱以及控制行走机构、升降机构、伸缩机构和清扫组件的控制箱。
22.与现有技术相比,本实用新型的有益效果在于:本实用新型通过行走机构实现前进、后退、左转、右转的方向动作,通过第一驱动组件带动移动件沿竖直方向上下移动,从而调节水平臂的高度与光伏面板阵列中心线高度一致,通过第二驱动组件带动工作臂沿水平方向移动,当车身在起伏的地面移动时,保证清扫组件完全位于光伏面板上面,用移动件与工作臂形成的两垂直轴的分解运动代替传统的关节式机械臂,并配合电动驱动方式使其响应速度更快,能较好保持末端清扫组件的运动平稳性;且传统的关节式机械臂当清扫对象为跟踪式光伏阵列,其光伏面板宽度较小,清扫滚轮装置整体重量较轻,其机械臂水平臂展可加长,但水平工作距离还是有限;当清扫对象为固定式光伏阵列,其光伏面板宽度很大,需要的清扫滚轮很长,整体重量较重,关节式机械臂的水平伸缩就很小,本实用新型中的光伏清扫机器人通过将工作臂的运动分解为水平方向和竖直方向能够避免工作臂在水平方向调整时受到过多限制,从而使其能适应各种光伏面板的同时保证清扫组件完全位于光伏面板上面。
附图说明
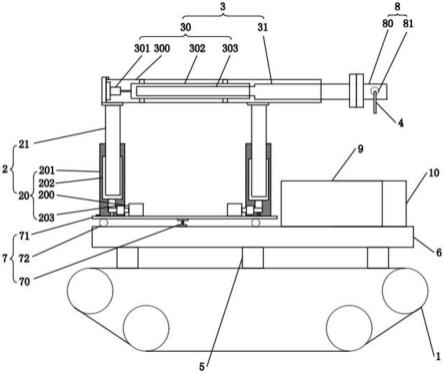
23.图1为本实用新型实施例提供的一种光伏清扫机器人定位结构示意图。
24.附图标记说明:
25.1-行走机构,2-升降机构,20-第一驱动组件,200-第二旋转电机,201-第一固定套筒,202-第一丝杆套筒,203-蜗轮蜗杆传动箱,21-移动件,3-伸缩机构,30-第二驱动组件,300-固定套筒,301-第三旋转电机,302-第二丝杆套筒,303-第二丝杆,31-工作臂,4-清扫组件,5-底盘支架,6-底板,7-转动机构,70-第一旋转电机,71-底盘,72-滚轮,8-连接组件,80-支座,81-第四旋转电机。
具体实施方式
26.下面结合附图,对本实用新型的一个具体实施方式进行详细描述,但应当理解本实用新型的保护范围并不受具体实施方式的限制。
27.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型的技术方案和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
28.太阳能光伏电池需要保持表面一定的清洁度,才能有较好的太阳能辐射获取。大型光伏发电厂遭遇雨雪沙尘后,电池面板表面会堆积灰尘、污渍等影响光照的杂物。需要对光伏电池表面进行清扫。
29.目前的光伏电厂光伏面板采用固定在光伏面板上的清扫装置进行清洗,固定式清扫装置需要在每个光伏面板阵列上都需要安装一个,当光伏阵列巨大时,需要的固定式清扫装置就多,清扫成本高,而且每个光伏面板阵列不需要每天清扫;采用移动式光伏清扫车内燃机动力和液压或气压驱动机械臂直接到达清扫位置进行清扫,此种方式较为方便成本也较低。
30.现有的移动式光伏清扫车的机械臂为关节式机械臂,关节式机械臂自重较大,对装载移动平台要求较高;工作时要求地面平整度较高,当地面不平,车身与光伏面板的位置发生变化时,关节式机械臂在重新定位运动过程中,其移动定位难度较大,而且液压、气压装置响应速度较慢,清扫装置运动不及时可能会碰撞光伏面板发生事故。此外,在野外长期工作环境下,液压系统及气动系统维护需要频繁定期维护,给运营维修人员带来极大不便。
31.为了解决上述技术问题,本实用新型实施例提供一种光伏清扫机器人,可以分别调节清扫装置的高度与水平距离,当车身在起伏的地面移动时,清扫装置可以良好在清扫光伏面板上工作,以下将结合附图对本发明的具体实施方式进行详细说明,其中,图1为本实用新型实施例提供的一种光伏清扫机器人的结构示意图。
32.如图1所示,本实用新型实施例提供的一种光伏清扫机器人,包括:行走机构1、升降机构2、伸缩机构3和清扫组件4,升降机构2包括第一驱动组件20和移动件21,伸缩机构3包括第二驱动组件30和工作臂31,第一驱动组件20及第二驱动组件30均为电驱动,第一驱动组件20连接于行走机构1,以带动第一驱动组件20在地面行走,移动件21连接于第一驱动组件20,以带动移动件21沿竖直方向上下移动,第二驱动组件30连接于移动件21,工作臂31连接于第二驱动组件30,以带动工作臂31沿垂直于移动件21移动方向进行移动,清扫组件4转动连接于工作臂31,清扫组件4用于对光伏板的板面进行清扫。
33.本实用新型通过行走机构实现前进、后退、左转、右转的方向动作,通过第一驱动
组件带动移动件沿竖直方向上下移动,从而调节水平臂的高度与光伏面板阵列中心线高度一致,通过第二驱动组件带动工作臂沿水平方向移动,当车身在起伏的地面移动时,保证清扫组件完全位于光伏面板上面,用移动件与工作臂形成的两垂直轴的分解运动代替传统的关节式机械臂,并配合电动驱动方式使其响应速度更快,能较好保持末端清扫组件的运动平稳性;且传统的关节式机械臂当清扫对象为跟踪式光伏阵列,其光伏面板宽度较小,清扫滚轮装置整体重量较轻,其机械臂水平臂展可加长,但水平工作距离还是有限;当清扫对象为固定式光伏阵列,其光伏面板宽度很大,需要的清扫滚轮很长,整体重量较重,关节式机械臂的水平伸缩就很小,本实用新型中的光伏清扫机器人通过将工作臂的运动分解为水平方向和竖直方向能够避免工作臂在水平方向调整时受到过多限制,从而使其能适应各种光伏面板的同时保证清扫组件完全位于光伏面板上面。
34.在进行光伏电池清扫时,清扫装置与行走车身成90度,清扫装置的重量通过较长清扫组件与车身固定,这样车身侧向会形成较大的力矩,会造成总体重心从车身向外移动,增加侧翻的几率。因此,在本实施例中,行走机构1为履带式行走机构,履带式行走机构上端连接有底板支架5,底盘支架5上端连接有底板6,底板6与升降机构2之间连接有转动机构7,转动机构7带动升降机构2在平行于底板6板面的平面内转动,通过控制两台驱动旋转电机的转向与转速,实现前进、后退、左转、右转的方向动作。
35.具体的,转动机构7包括:第一旋转电机70、底盘71和滚轮72,第一旋转电机70连接于底板6上,第一旋转电机70的输出轴竖直向上,底盘71固定于第一旋转电机70的输出轴,底盘71与底板6之间连接有滚轮72。
36.底盘下面固定滚轮放置于底板上,其通过旋转法兰盘固定在底板,与固定在底板上的第一旋转电机共轴连接,当清扫组件工作时,其由第一旋转电机带动底盘旋转与车身呈90度垂直,让清扫组件的重心向里面移动,保证整体重心在车身中心线左右,提高整个清扫机器人的稳定性。
37.可选的,第一驱动组件20包括第二旋转电机200、第一固定套筒201及第一丝杆套筒202,移动件21包括第一丝杆,第二旋转电机200固定于行走机构1上,第一固定套筒201固定于行走机构1,第一固定套筒201沿竖直方向延伸,第一丝杆套筒202位于第一固定套筒201内,第一丝杆套筒202连接于各第二旋转电机200的输出轴,以带动第一丝杆套筒202转动,第一丝杆螺接于第一丝杆套筒202,第一丝杆沿第一固定套筒201的延伸方向与第一固定套筒201滑动配合,伸缩机构3连接于第一丝杆,在本实施例中,第一固定套筒201起到限位作用,能够保证第一丝杆沿直线运动。
38.可选的,第二驱动组件30包括:第二固定套筒300、第三旋转电机301、第二丝杆套筒302及第二丝杆303,第二固定套筒300沿垂直于第一丝杆的方向连接于第一丝杆,第三旋转电机301固定于第二固定套筒300内,第三旋转电机301的输出轴沿垂直于第一丝杆的方向延伸,第二丝杆套筒302位于第二固定套筒300内,第二丝杆套筒302沿第二固定套筒300的轴向延伸,第二丝杆套筒302连接于第三旋转电机301,以带动第二丝杆套筒302转动,第二丝杆303螺接于第二丝杆套筒302,工作臂31连接于第二丝杆303,工作臂31或第二丝杆303与第二固定套筒300沿第二固定套筒300的延伸方向滑动配合,以带动工作臂31沿第二固定套筒300的延伸方向往复移动,在本实施例中,第二固定套筒302起到限位作用,能够保证工作臂31或第二丝杆303沿直线运动。
39.可选的,第二旋转电机200、第一固定套筒201及第一丝杆套筒202均为多个且数量相同,多个第二旋转电机200并排固定于行走机构1上,第一丝杆套筒202一一对应的连接于各第二旋转电机200的输出轴,第一丝杆一一对应的螺接于各第一丝杆套筒202,第二固定套筒300同时连接于多个第一丝杆的末端,在本实施例中,第二旋转电机200、第一固定套筒201及第一丝杆套筒202均为两个,多个第一丝杠能够进一步保证机器人的整体稳定性。
40.可选的,清扫组件4通过连接组件8转动连接于工作臂31。
41.可选的,连接组件8包括:支座80和第四旋转电机81;支座80连接于工作臂31,第四旋转电机81固定于支座80上,清扫组件4连接于第四旋转电机81的输出轴,以使清扫组件4在竖直面内转动,第四旋转电机用于调整清扫组件平行落在光伏面板上。
42.可选的,清扫组件4包括清扫滚筒,第四旋转电机驱动清扫滚筒,滚筒作用于光伏电池面板,进行清扫工作。
43.可选的,底板6上固定有为机器人供电的电池箱9以及控制行走机构1、升降机构2、伸缩机构3和清扫组件4的控制箱10。
44.在本实施例中,所有旋转电机均可连接减速器,如第二旋转电机200连接涡轮蜗杆传动箱203,本实用新型是对野外光伏电站光伏阵列电池面板清扫,提供一种符合不同光伏面板阵列面板清扫的移动机器人,针对电站光伏阵列安装高度不一致,地面起伏不平,面板阵列平面度不一致,面板空缺等特点,通过竖直方向和水平方向两个方向调整工作臂可以使其地面不平条件下移动时,清扫装置可以与面板保持良好接触并进行清扫工作,本实用新型提供一种光伏清扫机器人,可以分别调节清扫装置的高度与水平距离,采用双臂旋转支撑方式,可加长清扫机构的水平移动距离,能在水平臂末端加装重量大、长度大的固定式光伏阵列清扫滚筒装置。全体采用电力驱动,响应速度快,维护方便。当车身在起伏的地面移动时,清扫装置可以良好在清扫光伏面板上工作。
45.以上公开的仅为本实用新型的几个具体实施例,但是,本实用新型实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1