调整控制参数的调整装置、控制系统以及控制参数调整方法与流程
本发明涉及对控制马达的马达控制装置的控制参数进行调整的调整装置、包含调整装置的控制系统以及控制参数调整方法。
背景技术:
1、在机床、机器人或者工业机械等机械的驱动中使用的马达中,在进行满足预先设定的稳定条件(稳定余量等)的马达增益、滤波器系数等控制参数的优化时,需要多次执行如下的一系列调整过程:设定控制参数,使马达的控制装置进行动作来测定机械的频率特性,调整控制参数,使马达的控制装置进行动作来再次测定频率特性,确认是否满足稳定条件。
2、为了优化调整半导体制造装置、机床或工业用机器人中使用的马达控制装置的控制参数,在专利文献1中记载了用于确认控制参数的调整结果的控制参数灵敏度解析装置。
3、在专利文献1中记载了如下内容:控制参数灵敏度解析装置在由检测机械的动作量的检测单元、产生指令信号的指令器、接受指令信号来驱动电动机的控制器构成的电动机控制装置中,具有:开环频率响应特性测量单元,其取得不包含控制器的特性的开环频率响应特性;电动机控制装置的控制器的控制模型;运算单元,其根据测量出的开环频率响应特性和控制模型来计算闭环频率响应特性;灵敏度解析装置,其对控制器的控制参数与闭环频率响应特性的变化关系进行灵敏度解析。
4、在专利文献2中记载了对控制马达的伺服控制部(成为马达控制部)的至少一个滤波器系数和反馈增益(fg)中的至少一方(成为控制参数)进行调整的控制辅助装置。
5、在专利文献2中记载了如下内容:控制辅助装置使用调整前后的控制马达的伺服控制装置的至少一个滤波器系数和反馈增益中至少一方构成的第二信息和第一信息,计算滤波器系数和反馈增益中至少一方的调整前后的、滤波器和反馈增益的输入输出增益和相位延迟的频率特性中至少一方的频率特性,根据调整前后的至少一方的频率特性以及系数和反馈增益中至少一方的调整前的、测定出伺服控制装置的输入输出增益和输入输出的相位延迟的频率特性,求出滤波器系数和反馈增益中至少一方的调整后的伺服控制装置的输入输出增益和相位延迟的频率特性的推定值。
6、现有技术文献
7、专利文献
8、专利文献1:日本特开2005-275588号公报
9、专利文献2:国际公开第2021/251226号
技术实现思路
1、发明要解决的课题
2、在设定稳定余量作为马达控制装置的稳定条件时,若稳定余量(是指增益余量和相位余量)大,则稳定性增加,但响应性降低。另一方面,若稳定余量小,则稳定性降低,但响应性提高。
3、用户在设定马达控制装置的稳定余量时,有时想要根据在多个调整条件例如标准、重视稳定性、重视响应性、定制各条件下马达控制装置的频率特性等如何变化,来决定调整条件。
4、但是,按多个调整条件,反复进行调整马达增益、滤波器系数等控制参数来求出频率特性的过程,会花费大量的时间。
5、因此,期望能够通过一次测定频率特性来确认在多个调整条件下调整马达控制装置的控制参数的结果。
6、用于解决课题的手段
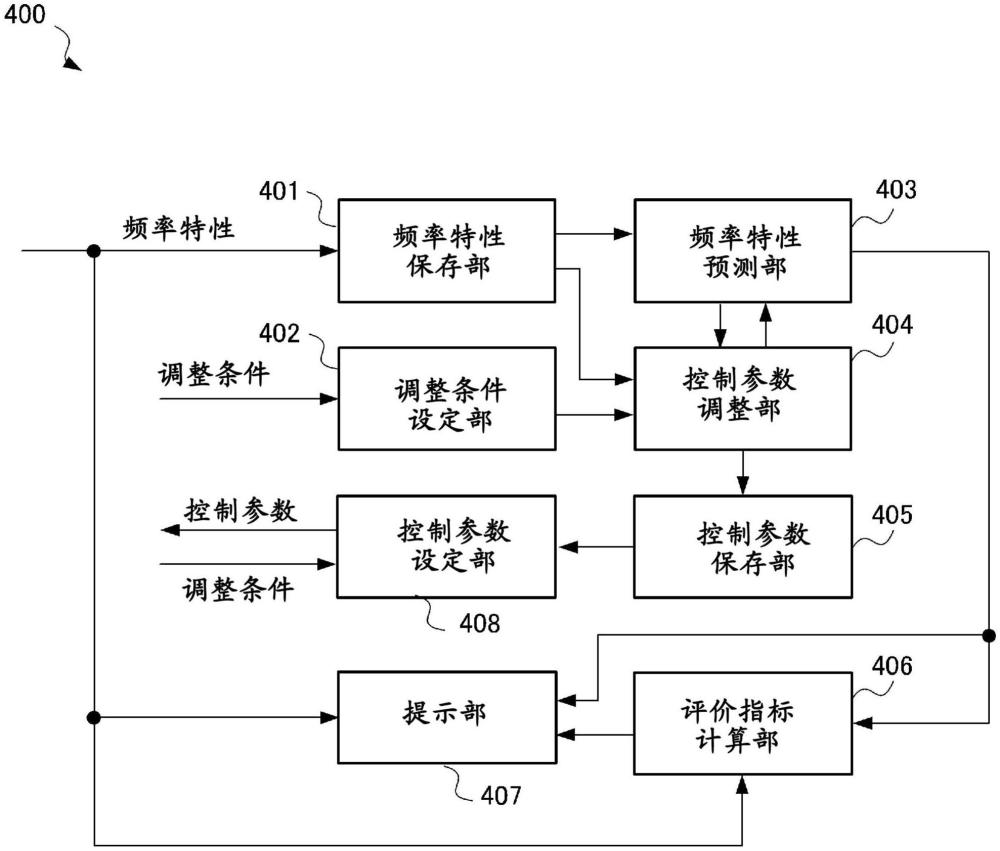
7、(1)本公开的第一方式是一种调整装置,其对控制马达的马达控制部的控制参数进行调整,其中,所述调整装置具有:
8、频率特性保存部,其保存机械的频率特性,该频率特性是使具有调整前的控制参数的所述马达控制部进行动作而由此测定出的;
9、调整条件设定部,其设定用于调整所述马达控制部的所述控制参数的多个调整条件;
10、频率特性预测部,其使用调整前和调整后的所述控制参数以及保存在所述频率特性保存部中的所述频率特性,来预测所述控制参数调整后的所述机械的频率特性;
11、控制参数调整部,其使用由所述调整条件设定部设定的多个调整条件中的一个和预测出的所述频率特性,来调整要输入到所述频率特性预测部的所述控制参数,以优化所述控制参数;
12、控制参数保存部,其保存针对所述多个调整条件优化后的多个所述控制参数;
13、评价指标计算部,其根据与优化后的控制参数对应的预测出的频率特性,计算该频率特性的评价指标;
14、提示部,其对多个调整条件的每个调整条件,提示与优化后的控制参数对应的、预测出的频率特性和所述评价指标中的至少一个;以及
15、控制参数设定部,其对所述马达控制部设定从保存在所述控制参数保存部中的多个所述控制参数中选择出的控制参数。
16、(2)本公开的第二方式是一种调整装置,其对控制马达的马达控制部的控制参数进行调整,其中,所述调整装置具有:
17、频率特性保存部,其保存机械的频率特性,该频率特性是使具有调整前的控制参数的所述马达控制部进行动作而由此测定出的;
18、调整条件设定部,其设定用于调整所述马达控制部的所述控制参数的多个调整条件;
19、频率特性预测部,其使用调整前和调整后的所述控制参数以及保存在所述频率特性保存部中的所述频率特性,来预测所述控制参数调整后的所述机械的频率特性;
20、控制参数调整部,其使用由所述调整条件设定部设定的多个调整条件中的一个和预测出的所述频率特性,来调整要输入到所述频率特性预测部的所述控制参数,以优化所述控制参数;
21、控制参数保存部,其保存针对所述多个调整条件优化后的多个所述控制参数;
22、时间响应预测部,其使用与优化后的控制参数对应的预测出的频率特性,来预测第一时间响应;
23、评价指标计算部,其根据预测出的所述第一时间响应来计算所述第一时间响应的评价指标;
24、提示部,其对多个调整条件的每个调整条件,提示所述第一时间响应和所述评价指标中的至少一个;以及
25、控制参数设定部,其对所述马达控制部设定从保存在所述控制参数保存部中的多个所述控制参数中选择出的控制参数。
26、(3)本公开的第三方式是一种控制系统,具有:
27、马达控制部,其控制马达;以及
28、上述(1)或(2)的调整装置。
29、(4)本公开的第四方式是一种控制参数调整方法,用于对控制马达的马达控制部的控制参数进行调整,其中,
30、计算机执行以下处理:
31、保存机械的频率特性,该频率特性是使具有调整前的控制参数的所述马达控制部进行动作而由此测定出的;
32、设定用于调整所述马达控制部的所述控制参数的多个调整条件;
33、使用调整前和调整后的所述控制参数以及保存的所述频率特性,来预测所述控制参数调整后的所述机械的频率特性;
34、使用设定的多个调整条件中的一个和预测出的所述频率特性,来调整所述控制参数,以优化所述控制参数;
35、保存针对所述多个调整条件优化后的多个所述控制参数;
36、根据与优化后的控制参数对应的预测出的频率特性,计算该频率特性的评价指标;
37、对多个调整条件的每个调整条件,提示与优化后的控制参数对应的、预测出的频率特性和所述评价指标中的至少一个;以及
38、对所述马达控制部设定从保存的多个所述控制参数中选择出的控制参数。
39、(5)本公开的第五方式是一种控制参数调整方法,用于对控制马达的马达控制部的控制参数进行调整,其中,
40、计算机执行以下处理:
41、保存机械的频率特性,该频率特性是使具有调整前的控制参数的所述马达控制部进行动作而由此测定出的;
42、设定用于调整所述马达控制部的所述控制参数的多个调整条件;
43、使用调整前和调整后的所述控制参数以及保存的所述频率特性,来预测所述控制参数调整后的所述机械的频率特性;
44、使用设定的多个调整条件中的一个和预测出的所述频率特性,来调整所述控制参数,以优化所述控制参数;
45、保存针对所述多个调整条件优化后的多个所述控制参数;
46、使用与优化后的控制参数对应的预测出的频率特性,来预测第一时间响应;
47、根据预测出的所述第一时间响应来计算所述第一时间响应的评价指标;
48、对多个调整条件的每个调整条件,提示所述第一时间响应和所述评价指标中的至少一个;以及
49、对所述马达控制部设定从保存的多个所述控制参数中选择出的控制参数。
50、发明效果
51、根据本公开的各方式,通过一次测定频率特性,能够求出在多个调整条件下调整了马达控制部的增益、滤波器系数等控制参数时的多个频率特性。结果,通过确认多个频率特性和/或多个频率特性的评价指标,可以简单地比较不同调整条件下调整后的频率特性和/或频率特性的评价指标,可以简单地选择想要应用的控制参数。另外,通过确认根据多个频率特性预测的多个时间响应和/或多个时间响应的评价指标,可以简单地比较不同调整条件下调整后的时间响应和/或时间响应的评价指标,可以简单地选择想要应用的控制参数。
- 还没有人留言评论。精彩留言会获得点赞!