一种永磁同步电机的无感转速控制方法、系统及其应用与流程
本发明涉及电机控制,尤其涉及一种永磁同步电机的无感转速控制方法、系统及其应用。
背景技术:
1、近年来,高速永磁同步电机凭借其自身的诸多优点,在现代工业与生活中应用越来越广泛。但由于安装机械传感器会使系统体积、重量和成本增加,同时,传感器易受周围环境的影响,比如:温湿度、震动等条件的干扰,降低了系统可靠性。因此,目前无位置传感器控制技术逐渐成为研究热点。
2、目前,常用的无传感器控制算法主要有:反电动势法、状态观测器法、模型参考自适应法等。这些方法各有优缺点,适用于不同的场景。基于模型的控制方案因其结构简单,灵活性高等优点而受关注。经典方法主要有:基于模型的自适应全阶观测器、模型参考自适应系统、滑模观测器、扩展卡尔曼滤波器。这些方法或多或少存在有对电机参数变化适应能力弱、存在高频抖振、相位滞后、计算量大等问题。在诸多电机无感控制方案中,基于同步技术的电机无感控制方案脱颖而出。基于锁相环和锁频环的方案效果是显著的,但是此方案对干扰的抑制能力是一个问题。为了解决此问题,一些方案被提出来。比如:将锁相环与基于自适应线性神经网络的自适应滤波器相结合的方案、采用sogi-fll速度估计来去除直流偏置的影响等。但是,这些方案由于在转速估计的系统中加入了一些影响系统动态过程的模块,例如滤波器等。就会导致动态响应时间较长,动态过程中出现估计退化、稳定性裕度低等问题,导致难以对电机在无传感器条件下的转速和位置的进行精确估计,不太适合实际应用,继而无法很好对电机进行精确控制。
技术实现思路
1、本发明的目的是为了能够实现对电机转速进行快速精确控制,而提出的一种永磁同步电机的无感转速控制方法、系统及其应用。
2、为了实现上述目的,本发明采用了如下技术方案:
3、本发明第一方面提供了一种永磁同步电机的无感转速控制方法,
4、所述控制方法包括:
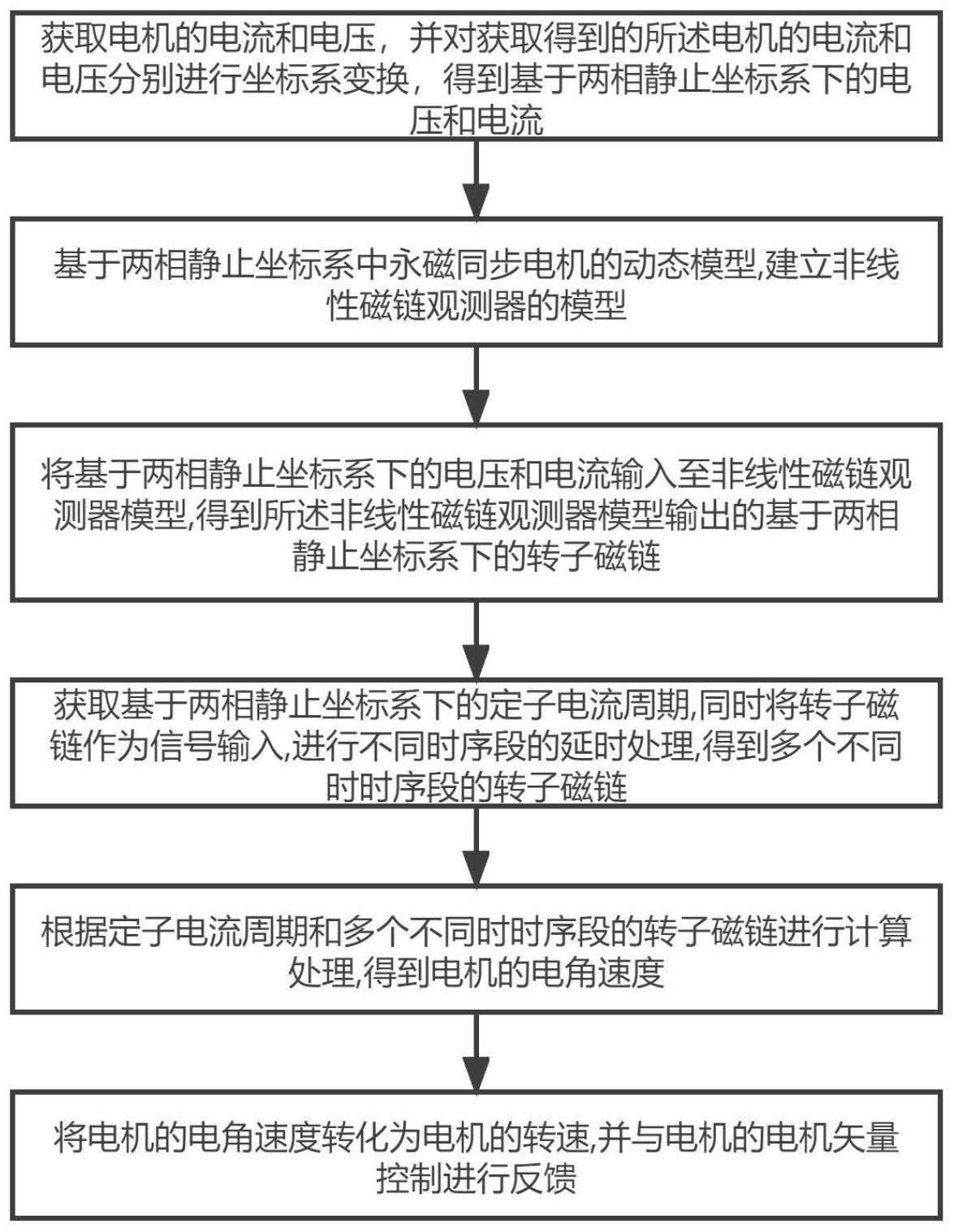
5、获取电机的电流和电压,并对获取得到的所述电机的电流和电压分别进行坐标系变换,得到基于两相静止坐标系下的电压和电流;
6、基于两相静止坐标系中永磁同步电机的动态模型,建立非线性磁链观测器的模型;
7、将基于两相静止坐标系下的电压和电流输入至非线性磁链观测器模型,得到所述非线性磁链观测器模型输出的基于两相静止坐标系下的转子磁链;
8、获取基于两相静止坐标系下的定子电流周期,同时将转子磁链作为信号输入,进行不同时序段的延时处理,得到多个不同时时序段的转子磁链;
9、根据定子电流周期和多个不同时时序段的转子磁链进行计算处理,得到电机的电角速度;
10、将电机的电角速度转化为电机的转速,并与电机的电机矢量控制进行反馈。
11、在一些可选的实施例中,对获取得到的所述电机的电流和电压分别进行坐标系变换包括:
12、通过park变换、clark变换中一种或多种组合,获得基于两相静止坐标系下的电压和电流。
13、在一些可选的实施例中,建立非线性磁链观测器模型的方法包括:
14、将两相静止坐标系定义为αβ,在αβ坐标系下,电机的动态模型为:
15、
16、
17、其中,iαβ=[iαiβ]t是定子电流,vαβ=[vαvβ]t是电动机端电压,rs为定子电阻,l是定子电感,ψm是永磁体磁链,te是电磁转矩,p是极对数;
18、建立非线性磁链观测器模型的方法还包括:
19、首先定义一个新的状态变量为:
20、
21、令变量y为:
22、y=-rsiαβ+vαβ 式4
23、将式1、式3和式4相结合,得下式:
24、
25、定义一个向量函数如下式:
26、η(x)=x-liαβ 式6
27、将式3和式6相结合,得到向量函数η(x)的欧几里得范数为:
28、
29、至此,建立的非线性磁链观测器模型为:
30、
31、其中,是观测器的状态变量,γ>0是观测器的增益,是与ψm之间距离的平方。
32、在一些可行的实施例中,建立非线性磁链观测器模型的方法还包括:
33、对磁链观测器输出的角度θ进行重构;
34、具体的,所述对磁链观测器输出的角度θ进行重构的方法包括:
35、从式3中推导出:
36、
37、继而定义得到:
38、
39、最终得到:
40、
41、其中,为磁链观测器输出的角度θ的估计值。
42、在一些可行的实施例中,得到所述非线性磁链观测器模型输出的基于两相静止坐标系下的转子磁链为:
43、
44、其中,|ψrα|为转子磁链在α轴上分量的幅值、|ψrβ|为转子磁链在β轴上分量的幅值、ω为电机的电角速度、为转子磁链在α轴上分量的相位、为转子磁链在β轴上分量的相位、λdc为转子磁链中存在的直流偏置。
45、在一些可行的实施例中,得到多个不同时时序段的转子磁链的方法包括:
46、将k来代替α和β,此时转子磁链为:
47、
48、此时,转子磁链经过三次不同时序段的延时处理后得到:
49、
50、在式14中,τ为不同时序段延时处理的延时时间参数,
51、其中,
52、
53、其中,tsk为α或者β轴的定子电流的周期。
54、在一些可行的实施例中,得到电机的电角速度的方法包括:
55、将式14中的ψrk1(t)和ψrk2(t)展开,得到下式:
56、
57、其中,
58、
59、γ1、γ2、γ3、γ4之间的关系可以表示成:
60、
61、根据式14-式17,利用基本的三角函数关系,得到下式:
62、
63、在式19的基础上,推导出:
64、
65、根据式18,式20可以表示为:
66、ψrk(t)-ψrk1(t)+ψrk2(t)-ψrk3(t)=2γ1[ψrk1(t)-ψrk2(t)] 式21
67、γ1满足下式:
68、
69、根据式17,获得电机电角速度为:
70、
71、在一些可行的实施例中,将电机的电角速度转化为电机的转速的方法包括:根据式23,将定义为是参数γ1的估计值,则估计的过程如下:
72、
73、则电机的转速e为:
74、
75、本发明第二方面提供了一种永磁同步电机的无感转速控制系统,采用第一方面中任一项所述的一种永磁同步电机的无感转速控制方法,所述控制系统还包括:
76、磁链观测器模块,所述磁链观测器模块用于构建生成转子磁链;
77、连续采样延时模块,所述连续采样延时模块用于对转子磁链进行延时处理,得到多个不同时时序段的转子磁链;
78、定子电流周期估计模块,所述定子电流周期估计模块用于监测所述连续采样延时模块中不同时序段延时处理的延时时间参数;
79、电机矢量控制模块,所述电机矢量控制模块用于根据计算得到的电机转速进行反馈控制电机。
80、本发明第三方面提供了一种永磁同步电机,采用第二方面中所述的一种永磁同步电机的无感转速控制系统。
81、本发明的有益效果为:
82、本发明在实施例中通过对电机的三相电流以及电压进行监测获取,经过转换得到基于两相坐标系下的电压与电流,同时根据基于两相坐标系下,进行构建非线性磁链观测器,而后将转换得到基于两相坐标系下的电压与电流作为磁链观测器的输入,获得基于两相坐标系的转子磁链,对获取的基于两相坐标系的转子磁链进行不同时序段的延时处理,得到多个不同时序端下的转子磁链,同时根据定子电流周期从多个转子磁链中提取出电机转速信息,得到电机转速后,与电机矢量控制相结合,形成对转速的闭环调节,使电机稳定运行。即不需要增加影响系统动态响应的过程或步骤,能够保证对电机转速监测的快速稳定且准确的效果。也即实现了能够实现对电机转速进行快速精确控制,能够使电机进行稳定运行。
- 还没有人留言评论。精彩留言会获得点赞!