一种不同功率缺额下分布式可控资源运行模式优化匹配与协调切换控制方法及装置
本发明涉及一种不同功率缺额下分布式可控资源运行模式优化匹配与协调切换控制方法及装置,属于智能电网。
背景技术:
1、随着全球能源危机和环境问题的日益突出,建立更加安全高效、可持续的能源开发利用模式已经成为未来能源系统的主要承载形式及重要发展方向。传统化石能源的短缺以及燃烧所带来的环境污染问题已经成为制约世界经济发展的主要瓶颈,风能、太阳能、储能等分布式发电技术的应用为解决上述问题提供了有效途径。目前,我国正大力推广ders(分布式能源资源)的利用,主要包括光伏发电、风力发电、蓄电池、燃料电池等。大量功率输出特性各异的ders并入配电网会产生一系列问题,如功率波动、电能质量下降等。因此,实现对运行于不同工作模式下ders的灵活管控和协调控制,对于提高配电网安全稳定经济运行具有重要意义。
2、配电网的优化运行需要通过对ders的多模态切换实现。多类型分布式可控资源的运行特性各异、工作模式复杂,如何在控制策略中加入对ders动态运行特性的描述以实现切换过程中的离散和连续控制,对于实现ders的多模态切换至关重要。一般,将由连续变量和离散事件相互作用影响所构成的动态系统视作混杂系统,配电网是一个典型的混杂系统。综上,传统的配电网能量管理系统的管理对象单一,结构简单,其控制手段无法实现对多类型ders的灵活管控。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种不同功率缺额下分布式可控资源运行模式优化匹配与协调切换控制方法及装置,能够实现对不同功率缺额下的多种分布式可控资源的灵活调控,智能程度高、准确性高。
2、为达到上述目的,本发明是采用下述技术方案实现的:
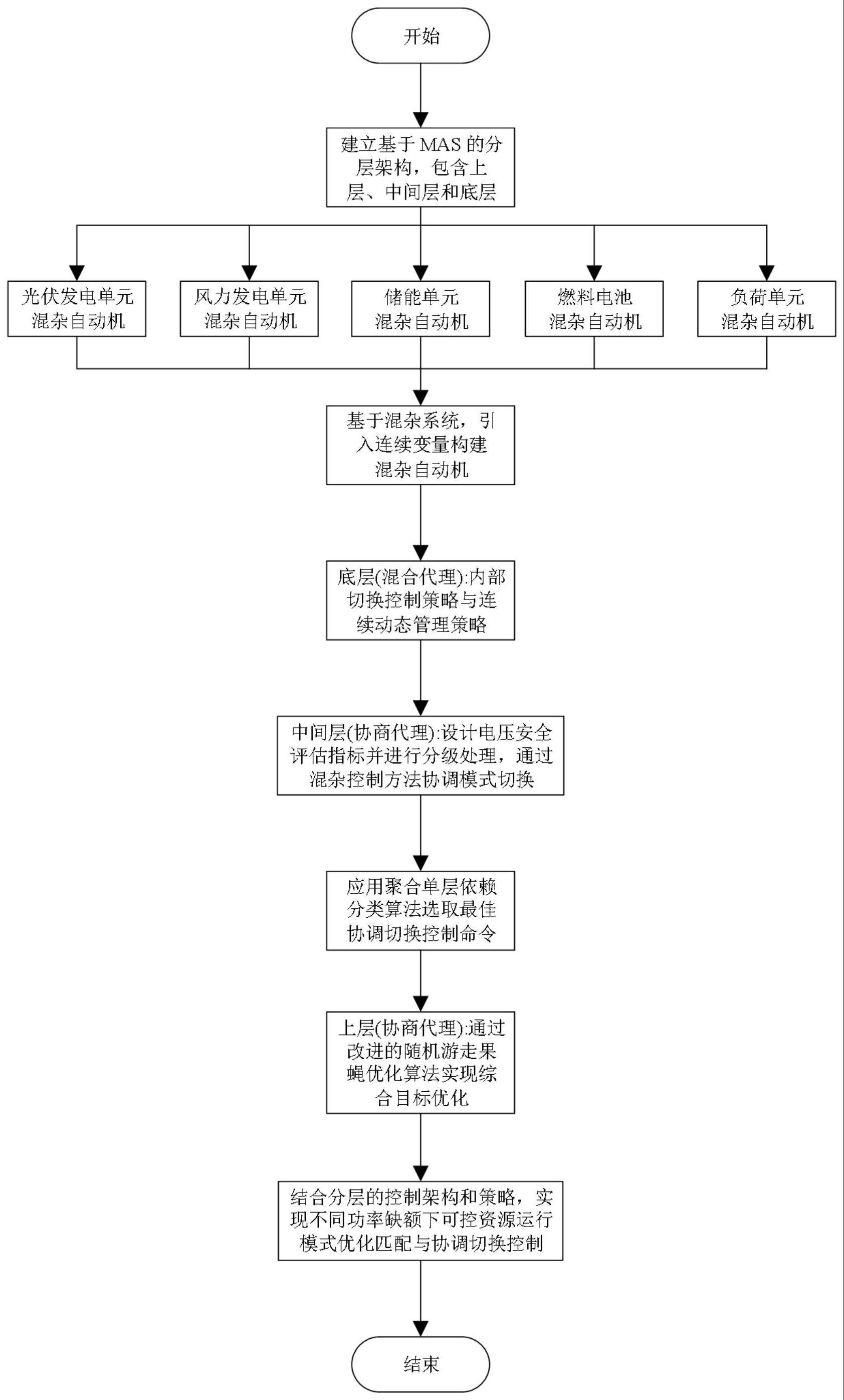
3、第一方面,本发明提供了一种不同功率缺额下分布式可控资源运行模式优化匹配与协调切换控制方法,包括以下步骤:
4、步骤一:针对配电网的协调控制目标,建立基于mas(multi-agent system,mas)的配电网分层架构,将配电网控制结构分为上层、中间层和底层;
5、步骤二:考虑到在控制过程中,既包含有切换不同分布式电源(distributedenergy resources,ders)及负荷单元运行模态的离散控制命令,又包含有执行端逆变器的连续控制指令,因此在有限自动机概念的基础上,加入连续变量,构建具有6元数组表示的混杂自动机模型;
6、步骤三:针对光伏发电单元、风力发电单元、储能单元、燃料电池以及负荷的运行特性,分别建立相应的混杂自动机模型;
7、步骤四:将底层的本地控制策略分为内部切换控制策略与连续动态管理策略,其中,内部切换控制策略以中间层的协调控制命令为基准,连续动态管理设计为基于spwm的双环控制方法;
8、步骤五:在中间层多智能体结构中设计协调控制策略,构建系统电压安全性评估指标并进行分级处理,根据系统电压安全评估结果,应用基于事件触发的混杂控制来协调ders以及负荷单元工作模式的切换;
9、步骤六:为尽量减少ders运行模态的切换次数并提高系统的智能性和控制命令执行的快速性和准确性,利用基于选择性模式的聚合单层依赖分类算法,将协调控制命令集合用作标签集,通过执行分类操作在控制命令集中选择最佳的协调切换控制命令;
10、步骤七:上层智能体针对不同功率缺额,考虑功率平衡、ders的输出功率和蓄电池容量约束,构造降低运行成本、减少污染物排放和提高电能质量的综合目标函数,利用改进的随机游走的果蝇优化算法,解决多目标优化问题,实现上层控制策略。
11、进一步的,步骤1中,为实现多模态切换,建立基于mas的分层结构,包括:
12、步骤1.1上层智能体——协商代理。通过优化过程实现能量管理,使系统获得最大的经济、环境和电能质量收益,优化模型基于处理模块中的实时数据设计。优化过程的时间尺度为每小时一次。
13、步骤1.2中间层智能体——协商代理。协调ders工作模式的切换以保证系统电压安全,切换控制的时间尺度为小时或分钟级别。
14、步骤1.3底层智能体——混合代理,包括反应层和协商层。反应层设置为“感知-动作”,拥有优先权,以快速响应紧急情况。协商层高度智能,能够控制或引导智能体的行为,协商层设置为“信念-愿望-意图”,高度智能,控制或计划智能体行为以实现其愿望或意图。
15、进一步的,步骤2考虑到在控制命令下发过程中,既含有离散值也含有连续值,故在有限自动机概念的基础上,加入连续变量,构建具有6元数组表示的混杂自动机模型。
16、自动机作为混杂系统的建模方法之一,具有直观性的优点。普通的自动机模型是用于处理离散事件,如果在其基础上加入连续动态特征,就会形成混杂自动机模型。混杂自动机主要由离散状态空间、使能状态、连续状态组成。在每个离散状态空间中,均有着相应的连续状态变化,当某一使能状态被满足时,混杂自动机会从一个离散状态空间迁移到另一个离散状态空间,相应的连续状态也会发生变迁。
17、典型的混杂自动机模型可以用一个6元数组表示:h=(d,l,f,s,f,i)。其中,d={δ1,δ2,…}表示一系列离散状态空间的集合;l表示一系列连续状态空间的集合;f={f1(δ1),f2(δ2),f3(δ3),…}表示每个离散状态空间下连续状态空间的变化规律;s={s1,s2,s3,…}表示离散状态空间与连续状态空间之间的映射;f={f1,f2,f3,…}表示状态空间转移的条件;i表示初始状态。
18、进一步的,步骤3,针对不同的ders构建混杂系统模型,包括:
19、步骤3.1构建光伏发电单元混杂自动机模型:
20、
21、式中,ppv为光伏发电单元的输出功率;pmppt为光伏发电单元工作在最大功率点模式下的输出功率;l为光照强度;m为光照强度阈值,由光伏电池的性能决定。针对光伏输出特性,将光伏发电单元设为两种工作模式:停运模式和mppt模式,将两种工作模式设置为光伏发电单元混杂自动机模型的离散状态;将光伏发电单元的功率输出值设置为连续状态;将光照强度的变化设置为转移条件。
22、步骤3.2构建风力发电单元混杂自动机模型:
23、
24、式中,pw为风力发电单元的输出功率;pe为风力发电单元的额定输出功率;v为实时风速;vi为切入风速;vr为额定风速;vo为切出风速。依据风力发电运行特性,将其工作模式分为三种:停运模式、mppt模式和pe模式。依据混杂自动机模型,将三种工作模式设置为风力发电单元混杂自动机模型的离散状态;将风力发电单元的功率输出值设置为连续状态;将风速变化设置为转移条件。
25、步骤3.3构建储能单元混杂自动机模型:
26、依据电池本身特性,将其分为五种工作模式:充电模式,放电模式,停运模式(三种)。其中,三种停运模式包括着正常停运,过充停运,过放停运。
27、根据混杂自动机模型,当soc≤socdown时,蓄电池从放电模式切换到过放停运模式,当有相关的切换命令时,会从过放停运模式再切换到充电模式。
28、当socup≤soc时,蓄电池会从充电模式切换到过充停运模式,当有相关的切换命令时,会从过充停运模式再切换到放电模式。
29、当socdown<soc<socup时,蓄电池会根据系统要求在放电模式、充电模式和正常停运模式之间相互切换。
30、步骤3.4构建燃料电池混杂自动机模型:
31、依据混杂自动机模型,设计燃料电池的两种工作模式:停运模式,额定输出模式。
32、步骤3.5构建负荷混杂自动机模型:
33、负荷分为可中断负荷和不可中断负荷两大类,供电优先级可中断负荷高于不可中断负荷。依据混杂自动机模型,设计负荷单元的两种工作模式:正常运行模式,负荷切除模式。
34、步骤3.6设置所有单元的混杂自动机模型的初始状态,激活离散状态空间,设置为逻辑“1”,其余的离散状态空间设置为逻辑“0”。由此可得
35、光伏发电单元:d={δ1,δ2}=[1,0];风力发电机单元:d={δ1,δ2,δ3}=[1,0,0];蓄电池单元:d={δ1,δ2,δ3,δ4,δ5}=[1,0,0,0,0];燃料电池单元:d={δ1,δ2}=[1,0];负荷单元:d={δ1,δ2}=[1,0]。
36、进一步的,步骤4将本地控制策略分为内部切换控制策略和连续动态管理策略,具体如下:
37、步骤4.1对光伏发电单元,内部切换控制命令如下:
38、
39、
40、对风力发电单元,内部切换控制命令如下:
41、
42、
43、
44、
45、
46、
47、
48、
49、蓄电池单元控制命令如下:
50、
51、
52、步骤4.2针对ders的逆变器设计了基于spwm的双环控制方法,其中外环设计为采用下垂控制的控制器,内环设计为dq旋转坐标系下的控制器。
53、进一步的,步骤5构建系统电压安全性评估指标并进行分级处理,根据系统电压安全评估结果,应用基于事件触发的混杂控制来协调ders以及负荷单元工作模式的切换,具体如下:
54、步骤5.1利用广域信号测量方法提取配电网系统第i条总线的电压序列,表示为之后,通过电压序列得到的第j时刻第i节点的瞬时电压的平均值表示如下:
55、
56、第j时刻第i节点的电压偏差值表示为:
57、
58、式中,为第j时刻第i节点的电压实际值。
59、由此,第j时刻第i节点的电压安全性评估指标可以表示为:
60、
61、步骤5.2基于t-s模糊神经网络的信息融合方法融合各个节点的电压安全评估性指标。
62、使用代替x=(x1,x2,…,xn)作为模糊神经网络的输入,模糊神经网络的输出则可以归一化为所要求的电压安全性评估指标。模糊神经网络的输出表示为:
63、
64、式中,为模糊神经网络的权重;θj为隶属度连乘积。经过信息融合后得到的各节点综合性的电压安全性评估指标记为u。
65、步骤5.3将评估指标u进行分级处理:
66、当0.9≥u或u≥1.1时,为电压崩溃状态,配电网系统停止运行。
67、当0.95>u≥0.9时,配电网系统对负荷供能不足,燃料电池工作或进行切负荷操作。
68、当0.98>u≥0.95时,配电网系统对负荷供能不足,蓄电池进行放电操作以平衡功率。
69、当1.02>u≥0.98时,系统电压处于正常波动范围。
70、当1.05>u≥1.02时,配电网系统的能量供应大于负荷需求,蓄电池进行充电操作以平衡功率。
71、当1.1>u≥1.05时,配电网系统的能量供应远大于负荷需求,燃料电池切换到停运模式或将可中断负荷恢复。
72、步骤5.4充分考虑触发持续时间、切换顺序和时间间隔,并将用作触发事件,u和soc用作触发条件。对具体的设计如下:
73、
74、c2:hs((δ12,δ22,δ23,δ33,δ42),(f12,f25,f26,f33,f42))
75、
76、
77、
78、
79、
80、
81、
82、
83、
84、
85、
86、
87、
88、式中,cn为标签集合,n∈[1,2,…,15];为触发持续时间;δt为切换时间间隔。利用上述协调控制命令,针对配电网中ders动作的变化,进行灵活调控。
89、进一步的,步骤6利用基于选择性模式的聚合单层依赖分类算法,将协调控制命令集合用作标签集,通过执行分类操作在控制命令集中选择最佳的协调切换控制命令,具体如下:
90、步骤6.1属性及属性值挖掘:采用基于选择性模式的聚合单层依赖分类算法来执行分类操作,使用配电网系统运行过程中u和soc的值作为连续型属性,使用蓄电池、燃料电池和负荷的工作模式作为离散型属性,对此进行属性挖掘;属性集合为:x={(u,a1),(soc,a2),(battery,a3),(fuel,a4),(load,a5)},a1~a5为五个属性对应的属性值。
91、步骤6.2处理连续属性的数据:u的样本空间(属性值)划分成七个连续的区间,并参考模糊控制将七个等级由低到高地定义为七个设定值:“vl”,“ml”,“l”,“z”,“h”,“mh”,“vh”。同理,soc的样本空间划分为五个连续的区间,并将五个等级从低到高定义为五个设定值:“vl”,“l”,“z”,“h”,“vh”;处理离散属性数据:对于蓄电池单元,设置样本空间为{0,1,2},其中,“0”表示充电模式,“1”表示放电模式,“2”表示停运模式;对于燃料电池单元,设置样本空间为{0,1},其中,“0”表示额定输出模式,“1”表示停运模式;对于负荷单元,设置样本空间为{0,1},“0”表示正常运行模式,“1”表示负荷切除模式。
92、步骤6.3假设数据集d有n个属性,训练实例表示为x=(a1,a2lan),其中ai(1≤i≤n)是实例x在第i个属性取值。训练实例的类别属于类别c={c1,c2lcm}中的一个,下面用c表示实例的类别。x的类别为c的概率p(c|x)可表示为:
93、
94、设集合f所包含属性集合为{a1,a2,l,ai},得出贝叶斯网络:
95、
96、将模式分类能力应用到贝叶斯网络,聚合所有模式对应的情况,得到基于选择性的贝叶斯概率预测公式:
97、
98、步骤6.4为减弱贝叶斯算法中选择性模式的属性与其它属性之间的依赖关系,采用基于选择性模式的聚合单层依赖分类算法,其最终概率预测公式为:
99、
100、式中,h={j|i+1≤j≤n∧f(aj)≥m},f(aj)是属性值包含aj的训练实例数目,用参数m限制,以达到进行条件概率估计所需的支持度。
101、步骤6.5基于选择性模式的聚合单层依赖分类算法,选取对应的属性后,根据配电网运行产生的数据挖掘属性值,同时,将协调控制命令集合作为标签集,通过执行分类操作,实现对最佳协调切换控制命令的选择。
102、进一步的,步骤7针对上层智能体建立综合目标函数,应用一种随机游走的果蝇优化算法实现目标优化,具体如下:
103、步骤7.1构建优化调度目标函数:
104、成本目标函数:
105、
106、式中:i:ders的个数;s:ders的工作模式;αis:当配电网系统处于工作模式时,αis=1,否则,αis=0;ri:第i个ders的燃料费用,对于可再生能源,ri=0;第i个ders在s模式下的有功输出;eis:消费特征函数;mi:第i个ders的维护成本,与成比例;ci:第i个ders的开机成本;βis:当第i个ders工作在s模式时,βis=1,否则,βis=0。
107、碳排放目标函数:
108、
109、式中:f2:配电网运行时实际的碳排放量;π1:火电机组单位有功出力碳排放强度;π2:燃气轮机单位有功出力碳排放强度;pin.t:单位时间段从主网购得电量;pout.t:单位时段t内燃气轮机发电功率;清洁能源碳排放为0。
110、电能质量目标函数:
111、
112、式中:σis为第i个ders在s模式下的电能质量系数。σis通过电压安全性评估指标确定。
113、步骤7.2构造约束条件:
114、功率平衡约束:
115、pl=ppv+pw+pf+(-1)npbat(14)
116、式中,pl为系统的负荷需求;ppv为光伏发电单元的输出功率;pw为风力发电单元的输出功率;pbat为蓄电池的输出/吸收的功率;n∈[0,1],蓄电池处于充电模式时,n=1,蓄电池处于放电模式时,n=0;pf为燃料电池的输出功率。
117、ders的输出功率约束:
118、
119、式中,pi为第i个ders的输出功率;为第i个ders的最小输出功率;为第i个ders的最大输出功率。
120、蓄电池容量约束:
121、socdown<soc<socup(16)
122、式中,soc为蓄电池的荷电状态;socdown为蓄电池的最低容量状态值;socup为蓄电池的最高容量状态值。
123、步骤7.3基于一种改进的果蝇优化算法,用于对优化调度的实现。
124、步骤7.4以权重系数的形式处理多目标优化问题,能量管理可以概括为求解如下满足约束条件的目标优化函数:
125、
126、式中,ω1、ω2、ω3代表各目标函数的权重系数,ω1+ω2+ω3=1。
127、第二方面,本发明提供一种不同功率缺额下分布式可控资源运行模式优化匹配与协调切换控制装置,所述装置包括:
128、架构建立模块:用于针对配电网的协调控制目标,建立基于mas的配电网分层架构,将配电网控制结构分为上层、中间层和底层;
129、模型构建模块:用于在有限自动机概念的基础上,加入连续变量,构建具有6元数组表示的混杂自动机模型;
130、模型建立模块:用于针对光伏发电单元、风力发电单元、储能单元、燃料电池以及负荷的运行特性,分别建立相应的混杂自动机模型;
131、管理策略模块:用于将底层的本地控制策略分为内部切换控制策略与连续动态管理策略,其中,内部切换控制策略以中间层的协调控制命令为基准,连续动态管理为基于spwm的双环控制方法;
132、协调控制模块:用于在中间层多智能体结构中设计协调控制策略,构建系统电压安全性评估指标并进行分级处理,根据系统电压安全评估结果,应用基于事件触发的混杂控制来协调ders以及负荷单元工作模式的切换;
133、分类操作模块:用于利用基于选择性模式的聚合单层依赖分类算法,将协调控制命令集合用作标签集,通过执行分类操作在控制命令集中选择最佳的协调切换控制命令;
134、多目标优化模块:用于上层智能体针对不同功率缺额,考虑功率平衡、ders的输出功率和蓄电池容量约束,构造降低运行成本、减少污染物排放和提高电能质量的综合目标函数,利用改进的随机游走的果蝇优化算法,解决多目标优化问题,实现上层控制策略。
135、第三方面,本发明提供一种不同功率缺额下分布式可控资源运行模式优化匹配与协调切换控制装置,其特征在于,包括处理器及存储介质;
136、所述存储介质用于存储指令;
137、所述处理器用于根据所述指令进行操作以执行根据第一方面所述方法的步骤。
138、与现有技术相比,本发明所达到的有益效果:
139、本发明构建基于mas的配电网分层协调架构,在不同的功率需求下,依据分层架构所制定的协调优化策略,实现对分布式可控资源运行模式的优化匹配与协调切换控制;
140、本发明的基于混杂系统以及自动机所构建的混杂自动机模型,能够与光伏、风电、蓄电池、燃料电池、负荷等运行特性相匹配。针对配电网运行过程所产生的庞杂的运行数据,机器学习算法能够有效处理,通过基于选择性模式的聚合单层依赖分类算法实现对ders运行模式的最佳协调切换控制。综合考虑系统的供需平衡约束、ders的运行约束,构造降低运行成本、减少污染物排放和提高电能质量的优化目标函数,并通过改进的随机游走果蝇算法求解,从而实现系统的安全经济优化运行。
- 还没有人留言评论。精彩留言会获得点赞!