本发明属于永磁同步电机伺服控制领域,具体涉及一种永磁同步电机伺服系统及永磁同步电机扰动优化抑制方法。
背景技术:
1、永磁同步电机因其具有效率高、结构简单、体积小、转矩输出比高等优点,常被作为跟踪控制系统的直接驱动机构。在电机稳定运行过程中,电机转子磁链谐波、齿槽转矩、逆变器死区效应等会引起周期性转矩波动,进而降低电机的跟踪精度。除了电机本身的力矩波动,外界摩擦、负载扰动等也会影响电机跟踪精度。摩擦作为一种非线性扰动,对速度平稳性影响显著,其死区非线性甚至会引起低速振荡进而降低指向精度。
2、针对复杂的非线性扰动,有学者提出改进的非线性pid控制,通过调整各项系数来提高扰动抑制能力,但其鲁棒性不高。另一种解决方法就是扰动补偿,其中基于扰动观测器的补偿算法无需描述被控对象的传递函数关系,不依赖于包含扰动的特定数学模型,也无需对扰动作用量进行直接测量,具有较强鲁棒性。而状态观测器作为一种通用的扰动观测器,相比于非线性观测器其参数易于整定,工程上更便于实现。
3、目前针对伺服系统的极限环问题,一般采用基于摩擦模型的方法进行分析,这类分析方法对摩擦进行非线性建模,但其精度严重依赖于摩擦的建模精度,难以在工程实践中快速有效地应用。与此同时,由于部分转矩波动如齿槽转矩具有与转速成固定关系的周期性,往往受限于状态观测器带宽,当电机转速提高时观测器并不能很好地补偿与转速相关的谐波分量。对于上述周期性波动,除了改变永磁同步电机本体设计结构方法外,迭代学习控制具有很好的学习和处理能力。有学者通过引入参数辨识策略,提出参数自适应迭代学习控制的转矩波动抑制策略,但参数辨识仅适用于稳态运行。选择常用的迭代学习控制方法,其中pd型迭代学习率能够获得更快的收敛速度,而pi型迭代学习率对转矩波动具有更好的抑制效果。在快速控制系统中,选用pd型迭代学习率获得更快的收敛速度。
技术实现思路
1、本发明的目的是克服现有技术的不足,提出一种永磁同步电机伺服系统及永磁同步电机扰动优化抑制方法。
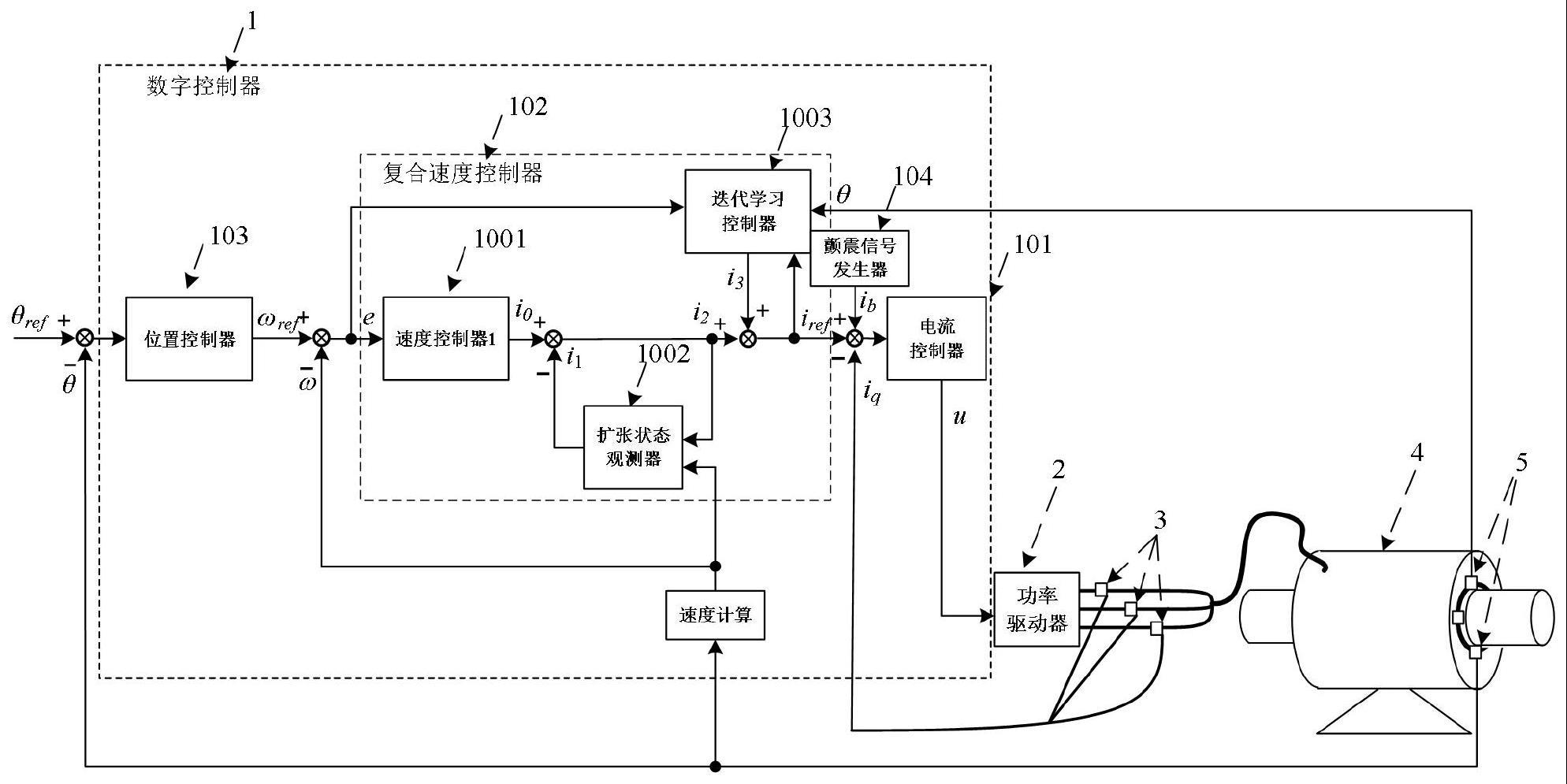
2、本发明采用的技术方案为:一种永磁同步电机伺服系统,包括:数字控制器1、功率驱动器2、电流传感器3、永磁同步电机4和角位置传感器5;数字控制器1由电流控制器101、复合速度控制器102、位置控制器103和颤震信号发生器104组成;复合速度控制器102由第一速度控制器1001、扩张状态观测器1002和迭代学习控制器1003组成。角位置传感器5安装于电机定子上,用来测量永磁同步电机4的转子相对于定子的位置信息,并将所述位置信息送至数字控制器1,数字控制器1将转子参考位置θref和反馈位置θ作差,送至位置控制器103输入端,位置控制器103完成电机转子位置闭环得到速度期望值ωref。数字控制器1通过位置信息计算电机定子的角速度ω,其与速度期望值ωref之差e(即e=ωref-ω)首先送至第一速度控制器1001完成速度闭环得到电流控制量i0;角速度ω和电流控制量i2同时送至扩张状态观测器1002进行计算得到扰动电流i1,扰动电流i1以负反馈形式加入电流控制量i0得到电流控制量i2;同时误差e、转子位置θ以及期望电流iref作为迭代学习控制器1003的输入,其输出i3作为正反馈加入电流控制量i2得到期望电流iref。颤震信号发生器104输出颤震电流ib与期望电流相加作为电流控制器101输入。电流传感器3安装于永磁同步电机三相线之上,用于测量永磁同步电机4三相电流,数字控制器1将所述电流传感器3的反馈电流进行坐标变换得到力矩电流iq,上述力矩电流iq作为负反馈信号加入电流控制器101输入端,其与期望电流iref送至电流控制器101经过闭环控制得到驱动电压u并送至功率驱动器2,即可完成永磁同步电机4的高精度伺服控制。
3、进一步地,所述第一速度控制器1001设计原则使得速度开环传递函数至少为i型系统,以抑制恒定的摩擦力矩和负载力矩。
4、进一步地,所述扩张状态观测器1002为线性结构,参数易于整定、不依赖于系统精确模型,能够对低频扰动具有较好的观测和抑制能力。所述扩张状态观测器1002模型为:
5、
6、
7、其中,为ω的观测信号,为扰动力矩的观测信号,ε为阻尼系数,ω0为观测带宽,kt为力矩系数,j为转动惯量。
8、进一步地,所述迭代学习控制器103具有学习、优化功能,能够对第一速度控制器101和扩张状态观测器102作用之后的周期性误差进行抑制。所述迭代学习控制器103速度优化算法为:
9、
10、其中,l(s)为学习函数,选用比例微分学习函数;q(s)为滤波函数,选用低通滤波函数;j表示迭代周期;k代表每个迭代周期中的采样点;e为迭代学习控制器1003的输入信号;α为调节因子,kp为学习函数比例系数,kd为学习函数微分系数,τ为一阶惯性环节的时间常数,s为拉普拉斯算子,i为迭代学习控制器1003的输出信号。
11、进一步地,所述转子位置信息θ为电机转子旋转一圈0°~360°;电机旋转一周即为一个迭代周期,每个周期采样点根据转子位置θ产生。
12、进一步地,所述颤震信号发生器104输出的颤震信号幅值需至少克服静摩擦的前提下尽可能小,其频率需高于速度带宽频段。颤震信号注入策略与速度大小负相关,保证颤震信号主要在极低速情况下起作用。
13、一种永磁同步电机扰动优化抑制方法,所述方法基于上述永磁同步电机伺服系统实现,其特征在于:永磁同步电机扰动优化抑制方法实现过程:
14、(1)电流传感器3安装于永磁同步电机三相线之上,角位置传感器5安装于电机定子上;
15、(2)设计空间矢量调制算法将电流控制器101的输出电压经过坐标变换和空间矢量调制得到三相pwm驱动电压送至功率驱动器驱动电机运转;
16、(3)设计电流控制器101,所述电流控制器101采用比例积分控制算法,其中ki为比例系数,bi为积分系数,使电流环带宽大于300hz,以保证永磁同步电机4力矩响应速度;
17、(4)设计第一速度控制器1001,所述电流控制器101采用比例积分控制算法,其参数kv和bv的整定方式采用pid控制器参数的整定方式,并将上述参数离散化后得到控制器参数;
18、(5)设计状态观测器1002,通过整定观测器带宽ω0使其能对电机扰动力矩进行观测,并相比第一速度控制器降低低频扰动抑制能力,将状态观测器1002得到的输出扰动电流i1作为负反馈加入第一速度控制器输出电流控制量i0;
19、(6)给定恒定的速度参考信号,使永磁同步电机在第一速度控制器1001和状态观测器1002的作用下匀速转动多个周期,直至速度误差稳定;之后将迭代控制器1003输出的电流优化控制量i3作为正反馈和电流控制量i2相加,送至电流控制器101的输入端,通过设计迭代控制器1003调节因子α和pd参数来优化电机跟踪误差信息;
20、(7)给定极低速参考信号,辨识系统克服静摩擦力需要的最小驱动电流,设置颤震信号发生器104输出ib幅值,通过整定系数kb来设置需要注入颤震信号的低速范围;
21、(8)设计位置控制器101,其参数kp和bp的整定方式采用pid控制器参数的整定方法。
22、本发明与现有技术相比的优点在于:
23、(1)本发明提出的基于扰动观测器的复合扰动抑制方法在无附加硬件条件,且不依赖于精确的扰动模型情况下,实现对扰动的观测和主动抑制,控制简单易于实现。
24、(2)本发明提出的基于扰动观测器的复合扰动抑制方法,改善了单一扰动观测器带宽受限抑制能力不足的问题,克服了电机极低速运行时的“极限环”,进一步抑制了电机快速旋转时的周期性扰动。