电机控制方法、装置、计算机可读存储介质和电子设备与流程
本技术涉及电机控制领域,具体而言,涉及一种电机控制方法、装置、计算机可读存储介质、处理器和电子设备。
背景技术:
1、在电机控制领域中虚拟信号注入方法能够避免繁琐的电流map标定过程,但是该方法易受电机电感参数变化的影响。目前针对虚拟信号注入法受电机参数变化问题主要有以下几种解决方案:通过测试获取电机不同工况下电机参数值或者通过在线参数辨识算法获取电机参数,上述方法都是通过直接或间接方法获取电机参数提高虚拟信号注入方法的性能。由此可知,目前主流方法都是通过获取电机参数达到解决问题的目的,但是直接测量法过程繁琐,需要对不同工况下电机参数进行测量。虚拟信号注入法的初衷是避免电流map的标定,现在为了提高其性能却要重新测试电机参数,此消彼长下工作量并没有得到削减;另外通过参数辨识获取电机参数的相关算法也有各自的缺陷,或者算法过于复杂,增加控制器的运算负担,或者辨识出的参数不准,或者一些参数辨识算法还停留在理论研究阶段。目前通过获取电机参数来提高虚拟信号注入法性能的方法依然存在缺陷。
2、因此,亟需一种能够解决虚拟信号注入法需要获取电机电感参数导致的工作量较大的问题的方法。
技术实现思路
1、本技术的主要目的在于提供一种电机控制方法、装置、计算机可读存储介质、处理器和电子设备,以至少解决现有技术中虚拟信号注入法容易受电机电感参数影响的问题。
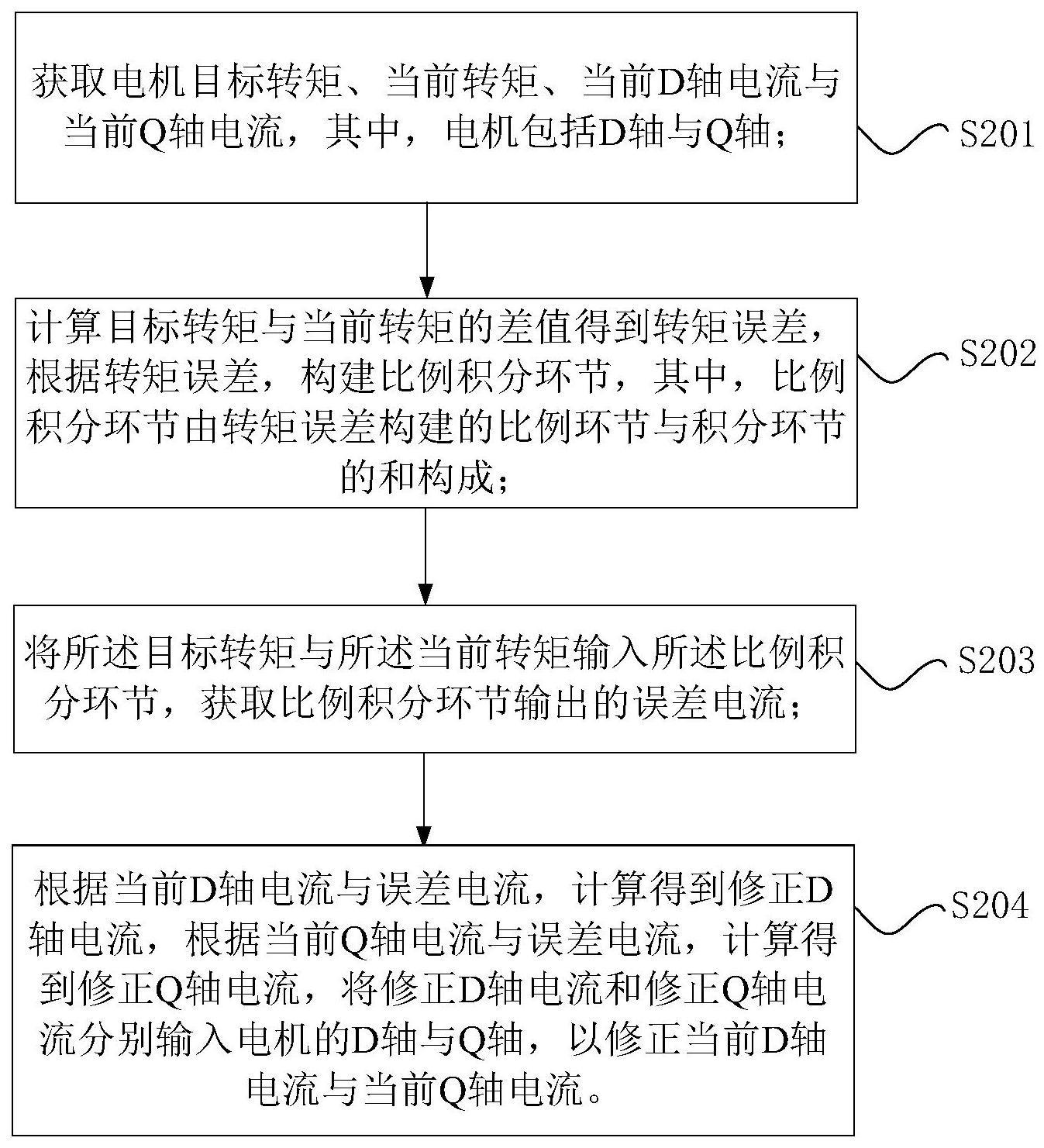
2、为了实现上述目的,根据本技术的一个方面,提供了一种电机控制方法,包括:获取电机目标转矩、当前转矩、当前d轴电流与当前q轴电流,其中,所述电机包括d轴与q轴;计算所述目标转矩与所述当前转矩的差值得到转矩误差,根据所述转矩误差,构建比例积分环节,其中,所述比例积分环节由所述转矩误差构建的比例环节与积分环节的和构成;将所述目标转矩与所述当前转矩输入所述比例积分环节,获取比例积分环节输出的误差电流;根据当前d轴电流与所述误差电流,计算得到修正d轴电流,根据当前q轴电流与所述误差电流,计算得到修正q轴电流,将所述修正d轴电流和所述修正q轴电流分别输入所述电机的d轴与q轴,以修正所述当前d轴电流与当前q轴电流。
3、可选地,根据所述转矩误差,构建比例积分环节,包括:计算所述转矩误差与比例常数的乘积,得到比例环节;计算所述转矩误差的积分与积分常数的乘积,得到积分环节;计算所述比例环节与所述积分环节的和,得到比例积分环节。
4、可选地,根据当前d轴电流与所述误差电流,计算得到修正d轴电流,包括:计算当前d轴电流与所述误差电流的和,得到修正d轴电流;根据当前q轴电流与所述误差电流,计算得到修正q轴电流,包括:计算当前q轴电流与所述误差电流的差,得到修正q轴电流。
5、可选地,获取当前d轴电流与当前q轴电流,包括:将一个常值电流注入所述电机的d轴与q轴,由虚拟信号注入法计算得到所述当前d轴电流与所述当前q轴电流。
6、可选地,将一个常值电流注入所述电机的d轴与q轴,由虚拟信号注入法计算得到所述当前d轴电流与所述当前q轴电流,包括:将一个常值电流注入所述电机的d轴与q轴,计算得到虚拟输出转矩;根据所述虚拟输出转矩,计算得到第一偏导数与第二偏导数,其中,所述第一偏导数为所述虚拟输出转矩对d轴电流的偏导数,所述第二偏导数为所述虚拟输出转矩对q轴电流的偏导数;根据所述第一偏导数与所述第二偏导数,计算得到第三偏导数,其中,所述第三偏导数为所述虚拟输出转矩对β角的偏导数;根据所述第二偏导数与所述第三偏导数,计算得到所述当前d轴电流与所述当前q轴电流。
7、可选地,将一个常值电流注入所述电机的d轴与q轴,计算得到虚拟输出转矩,包括:将所述常值电流注入所述电机的q轴,采用公式计算得到q轴对应的虚拟输出转矩,其中,teh表示所述电机的虚拟输出转矩,a表示所述常值电流,id表示所述电机的d轴的电流,iq表示所述电机的q轴的电流,ld表示所述电机的d轴的电感参数,lq表示所述电机的q轴的电感参数,np表示第一常数,ψf表示所述电机的电磁损耗;将所述常值电流注入所述电机的d轴,采用公式计算得到d轴对应的虚拟输出转矩。
8、可选地,根据所述虚拟输出转矩,计算得到第一偏导数与第二偏导数,包括:根据所述d轴对应的虚拟输出转矩,采用公式计算得到第一偏导数,其中,a表示所述常值电流,id表示所述电机的d轴的电流,iq表示所述电机的q轴的电流,表示将所述常值电流注入所述电机的d轴计算得到的所述电机的虚拟输出转矩,te(id,iq)表示所述电机的当前转矩,表示所述虚拟输出转矩对d轴电流的偏导数;根据所述q轴对应的虚拟输出转矩,采用公式计算得到第二偏导数,其中,表示将所述常值电流注入所述电机的q轴计算得到的所述电机的虚拟输出转矩,表示所述虚拟输出转矩对q轴电流的偏导数。
9、可选地,根据所述第一偏导数与所述第二偏导数,计算得到第三偏导数,包括:根据所述第一偏导数与所述第二偏导数,采用公式计算得到第三偏导数,其中,β表示电流矢量角,表示所述虚拟输出转矩对d轴电流的偏导数,表示所述虚拟输出转矩对q轴电流的偏导数,表示所述虚拟输出转矩对所述电流矢量角的偏导数。
10、可选地,根据所述第二偏导数与所述第三偏导数,计算得到所述当前d轴电流与所述当前q轴电流,包括:根据所述第二偏导数与所述第三偏导数,采用公式计算得到当前d轴电流与所述当前q轴电流,其中,te表示所述电机的当前转矩,表示所述电机的目标转矩,表示所述当前d轴电流,表示所述当前q轴电流。
11、根据本技术的另一方面,提供了一种电机控制装置,包括:第一获取单元,用于获取电机目标转矩、当前转矩、当前d轴电流与当前q轴电流,其中,所述电机包括d轴与q轴;构建单元,用于计算所述目标转矩与所述当前转矩的差值得到转矩误差,根据所述转矩误差,构建比例积分环节,其中,所述比例积分环节由所述转矩误差构建的比例环节与积分环节的和构成;第二获取单元,用于将所述目标转矩与所述当前转矩输入所述比例积分环节,获取比例积分环节输出的误差电流;修正单元,用于根据当前d轴电流与所述误差电流,计算得到修正d轴电流,根据当前q轴电流与所述误差电流,计算得到修正q轴电流,将所述修正d轴电流和所述修正q轴电流分别输入所述电机的d轴与q轴,以修正所述当前d轴电流与当前q轴电流。应用本技术的技术方案,获取电机目标转矩、当前转矩、当前d轴电流与当前q轴电流,其中,所述电机包括d轴与q轴;计算所述目标转矩与所述当前转矩的差值得到转矩误差,根据所述转矩误差,构建比例积分环节,其中,所述比例积分环节由所述转矩误差构建的比例环节与积分环节的和构成;将所述目标转矩与所述当前转矩输入所述比例积分环节,获取比例积分环节输出的误差电流;根据当前d轴电流与所述误差电流,计算得到修正d轴电流,根据当前q轴电流与所述误差电流,计算得到修正q轴电流,将所述修正d轴电流和所述修正q轴电流分别输入所述电机的d轴与q轴,以修正所述当前d轴电流与当前q轴电流。与现有技术中,需要通过获取电机的电感参数值来解决虚拟信号注入法受电机电感参数影响从而导致工作量较大的方法相比,本技术无需获取电机的电感参数,通过构建比例积分环节,将电机的目标转矩与当前转矩作为比例积分环节的输入,根据比例积分环节输出的误差电流来修正虚拟信号注入法计算得到的当前d轴电流与当前q轴电流,从而达到修正电机的电感参数变化带来的影响的目的,解决了传统的虚拟信号注入法中需要获取电机电感参数导致的工作量较大的问题。
- 还没有人留言评论。精彩留言会获得点赞!