一种伺服电机系统转矩脉动的抑制方法及抑制系统与流程
本发明涉及伺服系统,具体涉及一种伺服电机系统转矩脉动的抑制方法及抑制系统。
背景技术:
1、伺服电机传动系统一般采用位置环、速度环、电流环三环控制,精确控制电机的转速和定位。在负载出现波动时可以通过pi控制快速地调节输出转矩,确保转速的稳定。
2、但是,这种调节方式是在负载波动后再进行调节的,因此其调节必然存在一定的滞后性,无法准确地对当前的波动进行补偿,甚至会带来一定的副作用,产生额外的波动,尤其是当伺服电机传动系统的连接有柔性部分且多个伺服电机传动系统耦合在一起时(典型的如多轴机器人),快速地调节转矩可能产生共振,且转矩的快速波动会导致机械上产生明显的震动感,尤其在机械整体的末端震动被放大,导致无法精确定位;而改变速度环调节速度又会导致无法快速补偿负载转矩的波动,导致电机端出现转速波动。
3、现有技术中,通常还采用增加固定的扰动转矩补偿或者通过模型观测速度进行转矩补偿等方式,但是在转速和负载变化的场景下,固定频次的振动抑制适应性不好,而通过观测速度波动的方式则响应较慢,仍然依赖于实际转速发生波动之后再进行补偿。
技术实现思路
1、本发明为解决现有技术中伺服电机传动系统的转矩脉动抑制方案存在响应速度快、准确性高和适应性好不可兼得的技术问题,提供一种伺服电机系统转矩脉动的抑制方法,可以预识别出伺服电机在各个位置的转矩脉动,从而可以提供更快速准确的转矩补偿,并且实现方式简单,调试方便,对多轴机器人等特定类型的转矩脉动补偿效果好。
2、本发明采用的技术方案:
3、一种伺服电机系统转矩脉动的抑制方法,所述抑制方法包括以下步骤:
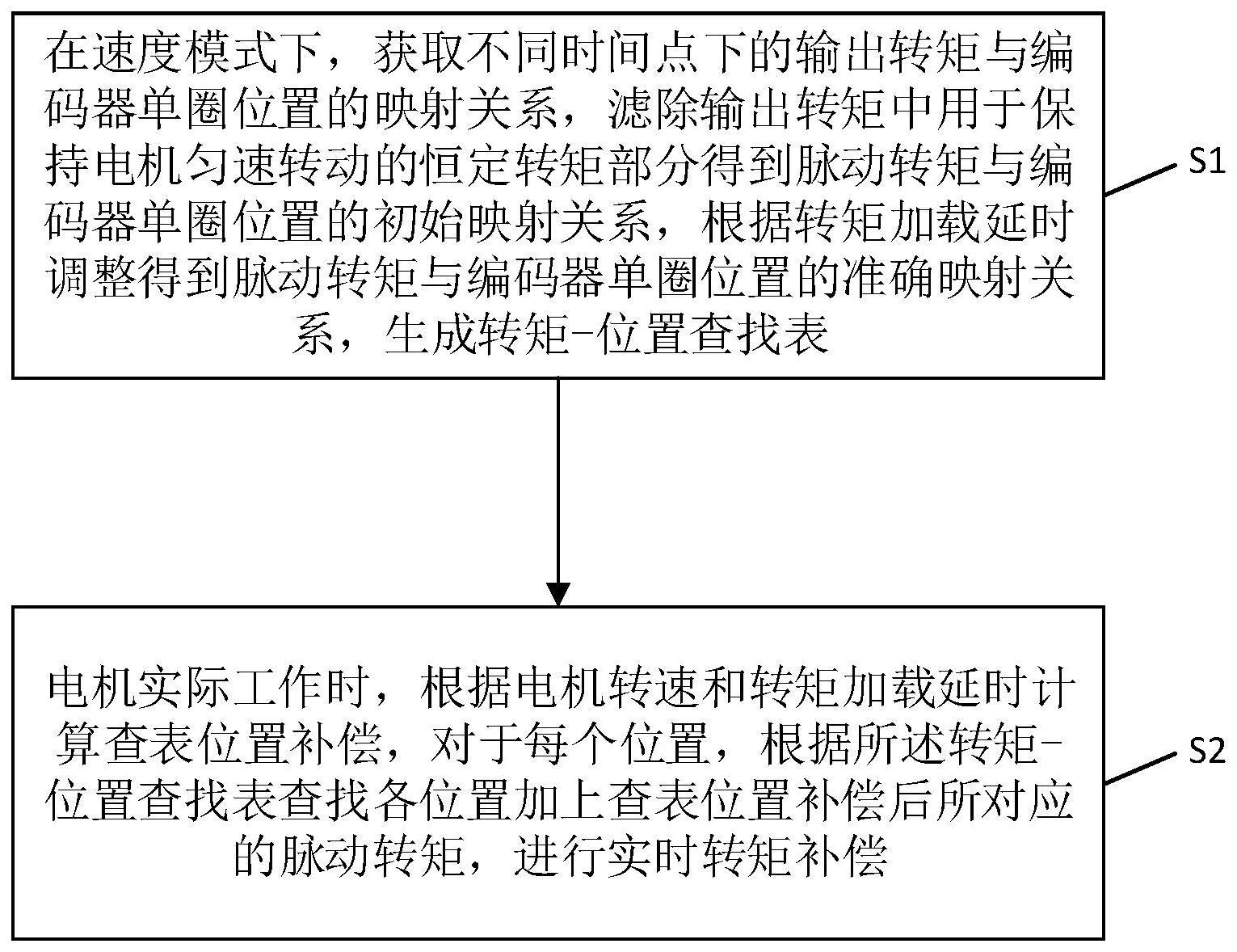
4、步骤s1:在速度模式下,获取不同时间点下的输出转矩与编码器单圈位置的映射关系,滤除输出转矩中用于保持电机匀速转动的恒定转矩部分得到脉动转矩与编码器单圈位置的初始映射关系,根据转矩加载延时调整得到脉动转矩与编码器单圈位置的准确映射关系,生成转矩-位置查找表;
5、步骤s2:电机实际工作时,根据电机转速和转矩加载延时计算查表位置补偿,对于每个位置,根据所述转矩-位置查找表查找各位置加上查表位置补偿后所对应的脉动转矩,进行实时转矩补偿。
6、可选地,所述步骤s1具体包括以下步骤:
7、步骤s11_a:在速度模式下,控制电机以一恒定速度正向或反向运行一圈以上的距离,以一定采样频率获取电机在运行过程中不同时间点下的位置反馈以及与该位置反馈对应的输出转矩,通过高通滤波器滤除输出转矩中用于保持伺服电机匀速运动的恒定转矩部分,得到不同时间点下的脉动转矩与编码器单圈位置的初始映射关系;
8、步骤s12_a:基于伺服特性计算在该恒定速度下的转矩加载时间,并得到编码器单圈位置的滞后量,对于每个编码器单圈位置,将上述脉动转矩与编码器单圈位置的初始映射关系中该编码器单圈位置对应的脉动转矩调整为该编码器单圈位置加上滞后量后所对应的脉动转矩,生成转矩-位置查找表。
9、或者,可选地,所述步骤s1具体包括以下步骤:
10、步骤s11_b:在速度模式下,控制电机以一恒定速度正向运行一圈以上的距离,以一定采样频率获取电机在正向运行过程中不同时间点下的位置反馈以及与该位置反馈对应的输出转矩,通过高通滤波器滤除输出转矩中用于保持伺服电机匀速运动的恒定转矩部分,得到不同时间点下的脉动转矩与编码器单圈位置的初始映射关系,并生成第一初始表格;
11、步骤s12_b:在速度模式下,控制电机以相同的恒定速度反向运行相同的距离,以一定采样频率获取电机在反向运行过程中不同时间点下的位置反馈以及与该位置反馈对应的输出转矩,通过高通滤波器滤除输出转矩中用于保持伺服电机匀速运动的恒定转矩部分,得到不同时间点下的脉动转矩与编码器单圈位置的初始映射关系,并生成第二初始表格;
12、步骤s13_b:基于伺服特性计算在该恒定速度下的转矩加载时间,并得到编码器单圈位置的滞后量,对于每个编码器单圈位置,将第一初始表格中该编码器单圈位置加上滞后量后所对应的脉动转矩和第二初始表格中该编码器单圈位置减去滞后量后所对应的脉动转矩取平均得到转矩-位置查找表。
13、再或者,可选地,所述步骤s1具体包括以下步骤:
14、步骤s11_c:在速度模式下,控制电机以一恒定速度正向运行一圈以上的距离,以一定采样频率获取电机在正向运行过程中不同时间点下的位置反馈以及与该位置反馈对应的输出转矩,通过高通滤波器滤除输出转矩中用于保持伺服电机匀速运动的恒定转矩部分,得到不同时间点下的脉动转矩与编码器单圈位置的初始映射关系,并生成第一初始表格;
15、步骤s12_c:在速度模式下,控制电机以相同的恒定速度反向运行相同的距离,以一定采样频率获取电机在反向运行过程中不同时间点下的位置反馈以及与该位置反馈对应的输出转矩,通过高通滤波器滤除输出转矩中用于保持伺服电机匀速运动的恒定转矩部分,得到不同时间点下的脉动转矩与编码器单圈位置的初始映射关系,并生成第二初始表格;
16、步骤s13_c:基于伺服特性计算在该恒定速度下的转矩加载时间,并得到编码器单圈位置的滞后量,对于每个编码器单圈位置,将第一初始表格中该编码器单圈位置加上滞后量后所对应的脉动转矩和第二初始表格中该编码器单圈位置减去滞后量后所对应的脉动转矩取平均得到一初始查找表;
17、步骤s14_c:在多个不同的机械位置或机械姿态下重复步骤s11_c-s13_c,共生成多张初始查找表,对这些初始查找表取平均得到转矩-位置查找表。
18、进一步地,所述步骤s2具体包括以下步骤:
19、步骤s21:控制电机在速度模式下以某一速度运行,当电机运行至各位置时,根据当前转速和转矩加载延时计算出对应的查表位置补偿,根据所述转矩-位置查找表查找当前位置加上查表位置补偿后所对应的脉动转矩,并给定补偿增益,实时调节该补偿增益直至转速波动最小,调节完成;
20、步骤s22:电机实际工作时,根据电机转速和转矩加载延时计算查表位置补偿,对于每个位置,根据所述转矩-位置查找表查找各位置加上查表位置补偿后所对应的脉动转矩,再乘以调节后的补偿增益,得到最终的补偿转矩进行实时转矩补偿。
21、本发明的另一方面,提供一种伺服电机系统转矩脉动的抑制系统,所述抑制系统包括控制模块、伺服驱动模块和电机,其中,
22、所述控制模块通过伺服驱动模块控制电机工作于速度模式,获取不同时间点下的输出转矩与编码器单圈位置的映射关系,滤除输出转矩中用于保持电机匀速转动的恒定转矩部分得到脉动转矩与编码器单圈位置的初始映射关系,根据转矩加载延时调整得到脉动转矩与编码器单圈位置的准确映射关系,生成转矩-位置查找表;
23、所述电机实际工作时,根据电机转速和转矩加载延时计算查表位置补偿,对于每个位置,根据所述转矩-位置查找表查找各位置加上查表位置补偿后所对应的脉动转矩,进行实时转矩补偿。
24、本发明的有益效果:本发明提供的一种伺服电机系统转矩脉动的抑制方法,采用针对负载波动预识别的方式,可以给系统尤其是在整体运行控制刚性较低的情况下提供更快速准确的转矩脉动补偿,同时通过实时的位置补偿计算和灵活的补偿系数给定可以更好地适应不同速度段运行下的转矩脉动补偿。
- 还没有人留言评论。精彩留言会获得点赞!