基于改进型自抗扰控制器的飞轮储能并网系统控制方法与流程
本发明涉及飞轮储能并网,基于改进型自抗扰控制器的飞轮储能并网系统控制方法。
背景技术:
1、近年来,飞轮储能系统已被逐步应用于针对电网的独立调频与多能源联合调频的领域。飞轮储能系统具有能量密度高、能量效率高、充放电可循环次数多等优点。因此,飞轮储能系统已在中国、美国、加拿大的可再生能源系统获得初步应用且具有进一步大规模应用的潜力。飞轮储能系统有多种已应用的拓扑结构,其中t型三电平背靠背型换流器是应用最广泛的拓扑结构。在实际工程应用中,功率指令的变化与充电、放电模式的切换会经常发生,但无论是参考指令的变化或充电、放电工况的切换都属于系统扰动。现有的pi控制器作为一种线性控制器,无法使系统具有更高的动态响应能力,而传统自抗扰控制器对高频测量噪声较为敏感,动态响应能力依然受限。因此,在动态响应方面亟需对传统控制策略与控制环路进行改进以增强系统动态响应能力,以在需要频繁充电、放电工况快速切换的飞轮储能系统中实现参考量的快速跟随,并快速响应电网的需求。
技术实现思路
1、本发明的目的是针对飞轮储能并网系统提供基于改进型自抗扰控制器的飞轮储能并网系统控制方法,能够在飞轮储能部分处于充电、放电工况频繁切换,功率指令变化的工况下能够迅速实现参考输出功率并处于稳定状态,具备优良的抗扰性和动态性能。
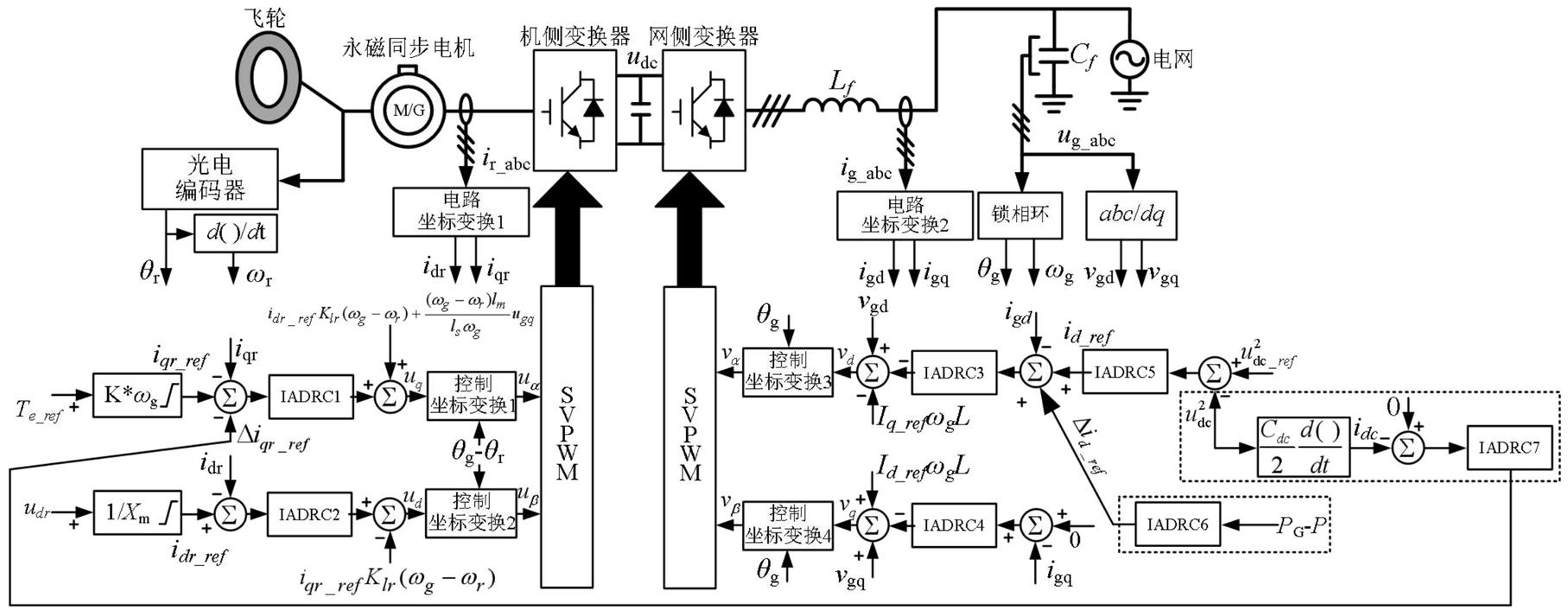
2、具体的,本发明提供基于改进型自抗扰控制器的飞轮储能并网系统控制方法,包含以下步骤:
3、a、构建改进型自抗扰控制器,包含改进型观测器ieso;所述改进型自抗扰控制器包含算法模型:,其中 k lx为所述改进型自抗扰控制器的增益, b lx为补偿因子, u为变量反馈,为变量指令, y为改进型自抗扰控制器算法模型的输出;为所述改进型观测器ieso的输出,且所述改进型观测器ieso包含如下关系:
4、
5、其中, l1, l2, l3, l4为改进型观测器ieso的比例系数,,,,为改进型观测器ieso的增益,用于将误差,,,成比例放大;
6、b、获取机侧转矩误差、机侧交流电压误差、直流支撑电容电压误差、网侧电流误差、网侧与机侧功率误差,并分别结合所述改进型自抗扰控制器算法模型计算获得机侧调制波q轴分量 u q、机侧调制波d轴分量 u d、网侧调制波d轴分量 v d与网侧调制波q轴分量 v q;
7、c、将机侧调制波q轴分量 u q、机侧调制波d轴分量 u d、网侧调制波d轴分量 v d与网侧调制波q轴分量 v q形成机侧变换器、网侧变换器的控制信号,以通过机侧端与网侧端的协同控制实现飞轮储能并网系统的快速动态响应调节。
8、进一步的,所述机侧转矩误差为转矩电流指令与转矩电流反馈 i qr的误差值:其中,所述转矩电流指令 ωg为飞轮储能并网系统中飞轮驱动电机输出轴的角速度,为转矩指令, k为修正系数。
9、进一步的,所述机侧交流电压误差为 u gq/ xm- idr,其中, u gq为机侧电压的无功值, xm为机侧电抗值, i dr为励磁电流反馈。
10、进一步的,所述网侧与机侧功率误差为其中,为网侧功率反馈, p为机侧功率反馈。
11、进一步的,所述直流支撑电容电压误差为,其中,为直流支撑电容电压指令的平方,为直流支撑电容电压的平方。
12、进一步的,所述网侧电流误差包含网侧有功电流误差与网侧无功电流误差;所述网侧无功电流误差为,其中,为网侧无功电流反馈;所述网侧有功电流误差为,其中为网侧有功电流指令修正值,为网侧有功电流反馈,为网侧有功电流指令。
13、进一步的,所述网侧有功电流指令、网侧有功电流指令的修正值基于改进型自抗扰控制器算法模型的计算方法分别为:
14、,
15、。
16、进一步的,基于直流支撑电容电压与改进型自抗扰控制器算法模型计算获得直流支撑电容的电流反馈值与机侧有功电流指令修正值,计算方法为:
17、,
18、,
19、式中,为直流支撑电容的电容值,a为直流支撑电容电流的指令设定常数值,可将a设为0,表示无电流波动。通过改进型自抗扰控制算法计算得出机侧q轴有功电流指令;其中,为直流支撑电容电压指令的平方,为直流支撑电容电压的平方。其中,直流支撑电容电流指令值由得出。
20、进一步的,机侧调制波q轴分量 u q、机侧调制波d轴分量 u d的计算方法如下:
21、,
22、;
23、其中,为励磁解耦项,为励磁电流指令,为解耦系数,与分别为飞轮储能并网系统中飞轮驱动电机的漏感与励磁电感, u gq为机侧电压的无功值;为转矩解耦项。
24、进一步的,网侧调制波d轴分量 v d与网侧调制波q轴分量 v q的计算方法如下:
25、,
26、,
27、其中, l为飞轮储能并网系统中飞轮驱动电机的电感,为网侧有功电压,为无功解耦项,为网侧无功电压。
28、进一步的,所述网侧电流误差包含网侧有功电流误差与网侧无功电流误差,其中,为网侧有功电流反馈,为网侧无功电流反馈;所述网侧有功电流误差通过改进型自抗扰控制算法计算得出的值减去无功解耦合项、并与网侧有功电压相加后得出网侧调制波的有功分量;网侧无功电流误差通过改进型自抗扰控制算法计算得出的值与有功解耦合项、网侧无功电压相加后得出网侧调制波的无功分量。
29、通过研究发现,飞轮储能并网系统动态响应速度慢的重要原因之一是由于机侧与网侧功率不平衡引起的,而功率不平衡直接体现在机侧与网侧的功率误差,间接体现在直流支撑电容电流波动上,如果平衡的话,电容电流应该是0。而在机侧与网侧功率不平衡时,动态调节最快的方法是同时改变机侧有功电流,网侧有功电流。本发明针对飞轮储能并网系统提供了一种快速动态响应的控制策略,通过使用改进型非线性自抗扰控制器代替传统控制策略中的线性pi控制器,添加新的机侧功率、网侧功率控制环节,协同调节电容电压、电容电流与机侧、网侧功率差以改变机侧有功电流,网侧有功电流,因此使得机侧与网侧功率快速平衡,加快系统动态响应速度,其在频繁充电、放电模式切换以及功率指令变化的情况下能够快速实现输出指令功率,进入稳定状态,具备优良的抗扰性和动态性能,有效地提高了飞轮储能并网系统的动态性能,能够及时、迅速地响应电网需求与储能装置的需求,并且所述方法的实现原理简单易行,具有实际的工程应用意义。
- 还没有人留言评论。精彩留言会获得点赞!