一种永磁同步电机无传感器控制系统及方法
本发明涉及电机控制领域,特别是涉及一种永磁同步电机无传感器控制系统及方法。
背景技术:
1、矢量控制拥有良好的动态性能和转矩响应能力以及较宽的调速范围,因此广泛应用于永磁同步电机(permanent magnetic synchronous motor,pmsm)的控制领域。但其控制性能严重依赖于电机的各种参数,因此通常需要采用高精度的编码器来获取电机的转速。由于编码器的引入降低了系统的稳定性,同时增加制造和维护的成本,因此对于无传感器控制的研究成为目前的一个热门领域。
2、高频信号注入法是一类基于电机凸极特性来获取转子位置信息的方法。由于其不依赖于电机的反电动势,高频信号注入法在低速甚至静止状态同样有良好的性能。因此高频信号注入法不仅可以用于转子初始位置检测,也可以用于pmsm的无传感器控制。传统的高频信号注入法采用锁相环来获取转子的位置信息,由于引入了低通和带通滤波器,对系统的性能产生不利影响。主要表现在:1)降低系统的带宽,影响系统的动态性能;2)引入了一定的相位时延,可能会造成电机的启动失败。
技术实现思路
1、本发明的目的是提供一种永磁同步电机无传感器控制系统及方法,可解决低通和带通滤波器带来的相位时延问题,实现对转子位置精确的跟踪。
2、为实现上述目的,本发明提供了如下方案:
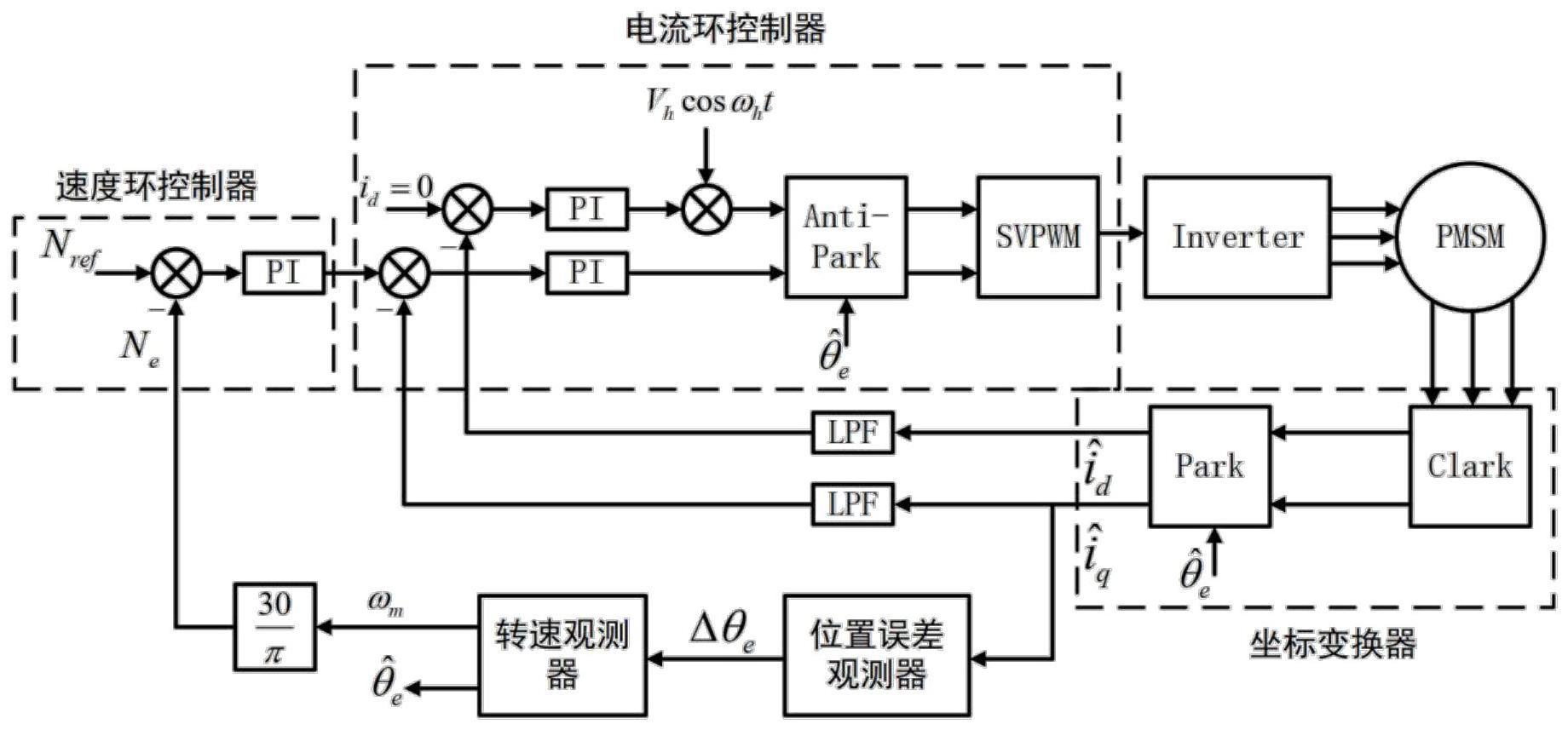
3、一种永磁同步电机无传感器控制系统,包括:速度环控制器、电流环控制器、逆变器、坐标变换器、位置误差观测器和转速观测器;
4、所述位置误差观测器为基于移动平均滤波器的幅值观测器;
5、速度环控制器、电流环控制器、逆变器、永磁同步电机、坐标变换器、位置误差观测器和转速观测器依次连接,转速观测器还分别与速度环控制器、电流环控制器和坐标变换器连接,形成闭环;
6、速度环控制器用于根据期望转速和实际转速的误差,获得期望电流值;
7、电流环控制器用于注入高频脉振信号,并利用所述期望电流值和估计的转子位置,输出pwm脉冲信号,作为逆变器的控制信号;
8、逆变器用于根据pwm脉冲信号对永磁同步电机进行调速控制;
9、坐标变换器用于根据估计的转子位置,将永磁同步电机调速控制后输出的三相静止坐标系下的三相交变信号转换为两相旋转坐标系下的电流信号;
10、位置误差观测器用于采用移动平均滤波器对两相旋转坐标系下的电流信号误差进行滤波,并根据滤波后的电流信号误差获得转子位置误差;
11、转速观测器用于根据转子位置误差,获得估计的转子位置和转子的实际转速,将转子的实际转速传输至速度环控制器,并将估计的转子位置分别传输至电流环控制器和坐标变换器,形成闭环控制。
12、可选地,在采用移动平均滤波器对两相旋转坐标系下的电流信号误差进行滤波时,需要满足以下两个条件:
13、
14、ωs=mωh
15、其中,tω为移动平均滤波器的窗口长度,ωh为高频脉振信号的频率,ωs为逆变器的开关频率,m为整数。
16、可选地,所述移动平均滤波器的时域传递函数为其中,gmaf(s)为时域传递函数,s为复参数;
17、所述移动平均滤波器离散化后的传递函数为其中,gmaf(z)为离散化后的传递函数,n为比值,n=tω/ts,ts为电流的采样周期,z为复参数;
18、所述移动平均滤波器的阻带中心频率为其中,ωn为阻带中心频率,n为正整数。
19、可选地,所述电流环控制器包括:转矩分量侧pi控制器、励磁分量侧pi控制器、反park变换模块和空间矢量脉宽调制模块;
20、转矩分量侧pi控制器分别与速度环控制器和反park变换模块连接,所述转矩分量侧pi控制器用于对期望电流值的转矩分量iq进行控制,输出q轴期望电压;
21、励磁分量侧pi控制器与反park变换模块连接,所述励磁分量侧pi控制器用于对期望电流值的励磁分量id进行控制,输出d轴期望电压,并将d轴期望电压叠加高频脉振电压信号后,输入反park变换模块;所述期望电流值的励磁分量id等于0;
22、反park变换模块与空间矢量脉宽调制模块连接,所述反park变换模块用于根据估计的转子位置,将q轴期望电压和叠加高频脉振电压信号后的d轴期望电压转换为两相静止坐标系下的电压分量;
23、空间矢量脉宽调制模块与逆变器连接,所述空间矢量脉宽调制模块用于根据两相静止坐标系下的电压分量,采用svpwm算法产生pwm脉冲信号。
24、可选地,所述位置误差观测器包括:电流信号误差计算模块、移动平均滤波器和积分器;
25、电流信号误差计算模块的输入端分别与坐标变换器和积分器连接,电流信号误差计算模块的输出端与移动平均滤波器连接;所述电流信号误差计算模块用于从坐标变换器获得两相旋转坐标系下的q轴电流信号,并从积分器获得观测高频电流幅值进而根据两相旋转坐标系下的q轴电流信号和观测高频电流幅值确定两相旋转坐标系下的电流信号误差;
26、移动平均滤波器与积分器连接,所述移动平均滤波器用于对两相旋转坐标系下的电流信号误差进行滤波,并通过积分器补偿得到观测高频电流幅值
27、可选地,所述两相旋转坐标系下的电流信号误差的计算公式为
28、e=hf(ωht)+hf(ωst)+hf(δiqh)
29、其中,
30、e为两相旋转坐标系下的电流信号误差,hf()为高频信号分量,t为时间,δiqh为两相旋转坐标系下的q轴电流信号和反馈信号之间的误差量,为基波电流的幅值,为高频脉振电压信号产生的感应电流幅值,为由逆变器开关管产生的高频噪声的幅值。
31、可选地,所述转速观测器为扩张状态观测器;
32、扩张状态观测器的表达式为
33、其中,为转子位置估计值的一阶导数,为电角速度估计值的一阶导数,为系统不确定部分估计值的一阶导数,j为永磁同步电机的转动惯量,p为极对数,tl为负载转矩,b为摩擦系数,ωe为电角速度,ωe=p·ωm,ωm为机械角速度,δθe为转子位置估计误差,te为电磁转矩,β1、β2和β3分别为第一、第二、第三参数,ξ为阻尼系数,ωb为中间变量,ω3db为期望的带宽。
34、可选地,还包括:第一低通滤波器和第二低通滤波器;
35、第一低通滤波器分别与坐标变换器和电流环控制器连接,所述第一低通滤波器用于对两相旋转坐标系下的d轴电流信号进行滤波,向电流环控制器输入d轴的电流基波信号;
36、第二低通滤波器分别与坐标变换器和电流环控制器连接,所述第二低通滤波器用于对两相旋转坐标系下的q轴电流信号进行滤波,向电流环控制器输入q轴的电流基波信号。
37、一种永磁同步电机无传感器控制方法,包括:
38、根据期望转速和实际转速的误差,获得期望电流值;
39、向电流环控制器中注入高频脉振信号,并结合所述期望电流值和估计的转子位置,输出pwm脉冲信号;
40、根据pwm脉冲信号对永磁同步电机进行调速控制;
41、根据估计的转子位置,将永磁同步电机调速控制后输出的三相静止坐标系下的三相交变信号转换为两相旋转坐标系下的电流信号;
42、采用移动平均滤波器对两相旋转坐标系下的电流信号误差进行滤波,并根据滤波后的电流信号误差获得转子位置误差;
43、根据转子位置误差,获得估计的转子位置和转子的实际转速,形成闭环控制。
44、可选地,在采用移动平均滤波器对两相旋转坐标系下的电流信号误差进行滤波时,需要满足以下两个条件:
45、
46、ωs=mωh
47、其中,tω为移动平均滤波器的窗口长度,ωh为高频脉振信号的频率,ωs为逆变器的开关频率,m为整数。
48、根据本发明提供的具体实施例,本发明公开了以下技术效果:
49、本发明公开一种永磁同步电机无传感器控制系统及方法,位置误差观测器为基于移动平均滤波器的幅值观测器,移动平均滤波器在多个频率区间内都呈带阻特性,而需要滤除的高频信号只分布在几个特定的频率范围内,所以通过移动平均滤波器能够将噪声进行有效的滤除,解决了低通和带通滤波器带来的相位时延问题,实现对转子位置精确的跟踪。
- 还没有人留言评论。精彩留言会获得点赞!