双馈风电机组故障穿越后有功恢复自适应整定方法及系统
本公开属于风电,尤其涉及一种双馈风电机组故障穿越后有功恢复自适应整定方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本公开相关的背景技术信息,不必然构成在先技术。
2、随着风电在电力系统中占比越来越高,其故障穿越及主动支撑能力对系统的稳定性变得越来越重要。在电网电压发生跌落时,目前,现有的风电并网标准要求风电机组优先向电网中注入无功电流以支撑电网电压。由于风电机组的变流器电流容量有限,为了避免电流越限,风机的有功电流通常会降低,造成有功功率的跌落。在电压恢复后,风电机组需将其有功功率恢复至故障前的值。然而,对于双馈风电机组来说,为了避免过大的机械载荷,双馈风电机组的有功功率速率不宜过快,该恢复过程通常需要几秒钟的时间。
3、然而,由于风电机组的有功恢复过程会对电力系统的频率产生影响,有功恢复过程也不宜过慢,否则会造成系统频率降低过多,影响系统的频率稳定性。因此,现有的风电并网标准对风电机组在电网电压恢复后的有功恢复速率做出了要求,其中,国家标准gb/t19963.1-2021中对有功功率恢复速率的要求是每秒钟至少恢复额定功率的20%。
4、上述国家标准中对风电机组有功功率恢复速率的要求是最低要求,实际应用中期望风电机组的有功功率能够尽快恢复。一般情况下目前通过仿真的手段确定风电机组载荷允许的有功恢复速率上限,即遍历所有的风电机组运行工况及故障场景,仿真分析不同恢复速率下的载荷情况,寻找每个工况和场景下载荷不越限时的恢复速率,然后对于所有工况及场景的恢复速率取最小值,以保证在所有工况和场景下都能保证载荷安全。但是,发明人发现,这种方法存在以下两个缺点:
5、(1)基于仿真的方法遍历所有运行工况及故障场景,实施复杂度较高,耗时耗力。
6、(2)不同工况及场景下允许的恢复速率是不一样的,目前的方法不能自适应的调整恢复速率。
技术实现思路
1、本公开为了解决上述问题,提供了一种双馈风电机组故障穿越后有功恢复自适应整定方法及系统,所述方案能够根据故障前风机的运行状态以及故障造成的转矩跌落程度自适应调整有功恢复速率,相比于传统固定恢复速率,可以加快有功功率恢复过程,减小有功恢复期间造成的能量缺额。
2、根据本公开实施例的第一个方面,提供了一种双馈风电机组故障穿越后有功恢复自适应整定方法,包括:
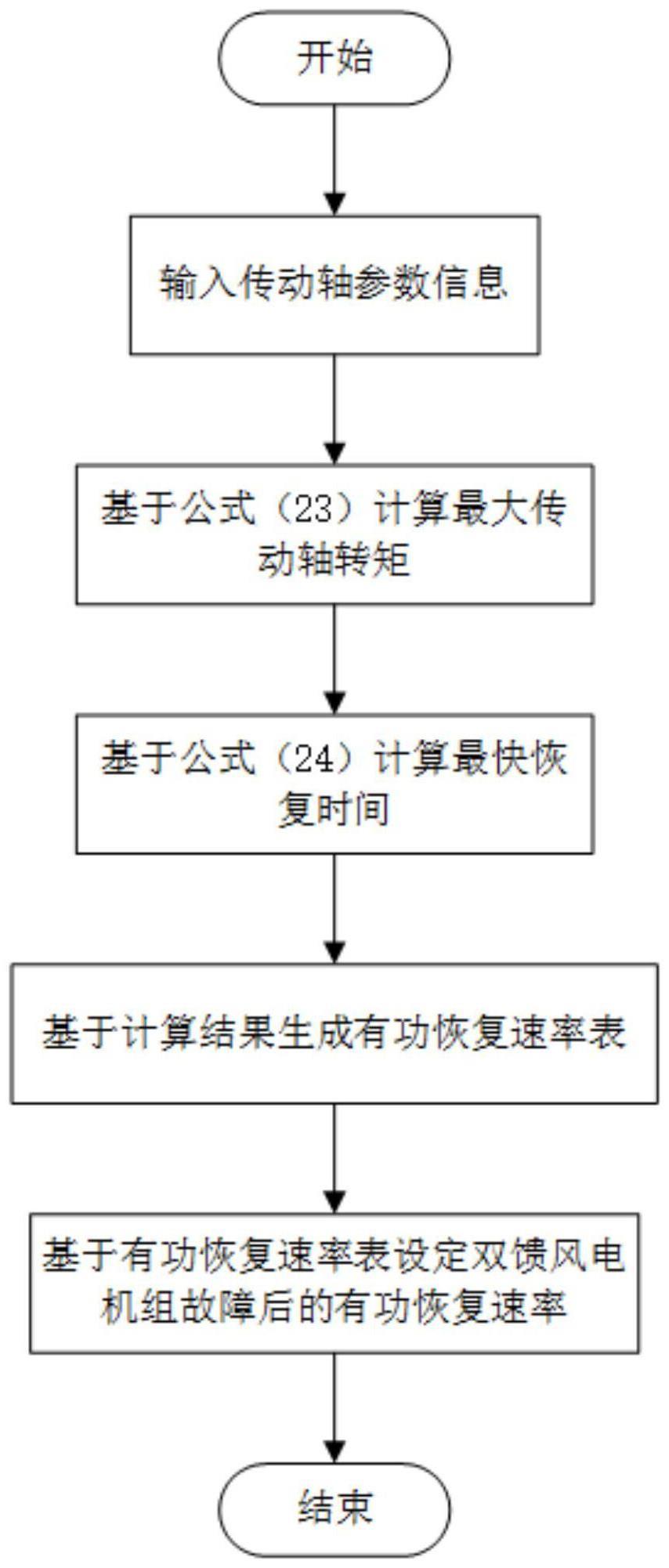
3、获取双馈风机的传动轴相关参数信息;
4、利用预先构建的双馈风机传动轴双质量块模型,获得风轮机和发电机之间的传动轴转矩表达式,其中,所述传动轴转矩表达式忽略风轮机转矩变化带来的影响,并将所述传动轴表示为一个不含零点的二阶系统;
5、基于获得的传动轴转矩表达式,计算当前参数信息对应的最大传动轴转矩表达式;其中,故障穿越过程中,所述传动轴转矩由稳态分量和暂态分量叠加构成,通过将发电机转矩分解为阶跃跌落和斜坡恢复两部分进行稳态分量和暂态分量的计算;
6、基于获得的相关参数信息、所述最大传动轴转矩表达式以及预设的传动轴转矩的极限设计值,计算斜坡恢复的最快恢复时间;
7、基于获得的相关参数信息及计算得到的斜坡恢复的最快恢复时间,生成有功恢复速率表;
8、基于所述有功恢复速率表设定双馈风电机组故障后的有功恢复速率。
9、进一步的,所述传动轴转矩表达式,具体表示如下:
10、
11、其中,kg为风轮机转动惯量与风轮机和发电机转动惯量之和的比值;s为传递函数微分算子,jt和jg分别是风轮机和发电机的转动惯量,k是传动轴等效弹性系数,d是传动轴等效阻尼,tg为发电机转矩。
12、进一步的,所述最大传动轴转矩表达式,具体表示如下:
13、
14、其中,
15、
16、其中,t0为故障前转矩,δt为转矩阶跃跌落程度,t2为双馈风机的传动轴转矩从故障发生到恢复至故障前的时间,trec为斜坡恢复时间。
17、进一步的,基于获得的相关参数信息、所述最大传动轴转矩表达式以及预设的传动轴转矩的极限设计值,计算斜坡恢复的最快恢复时间,具体为:以最大传动轴转矩表达式等于所述传动轴转矩的极限设计值,基于获得的相关参数信息,获得当前相关参数信息下对应的最快恢复时间。
18、进一步的,所述基于获得的相关参数信息及计算得到的斜坡恢复的最快恢复时间,生成有功恢复速率表,具体为:基于获得的斜坡恢复的最快恢复时间,计算得到当前相关参数信息对应的有功恢复速率;并基于不同的传动轴相关参数信息及其对应的有功恢复速率,构建有功恢复速率表。
19、进一步的,所述斜坡恢复的最快恢复时间与转动轴故障前转矩、转矩跌落程度以及故障持续时间具有函数关系。
20、进一步的,所述传动轴相关参数信息包括风轮机转动惯量、发电机转动惯量、风轮机角速度、发电机角速度、风轮机角度、发电机角度、传动轴等效弹性系数以及传动轴等效阻尼。
21、根据本公开实施例的第二个方面,提供了一种双馈风电机组故障穿越后有功恢复自适应整定系统,包括:
22、数据获取单元,其用于获取双馈风机的传动轴相关参数信息;
23、传动轴转矩表达式构建单元,其用于利用预先构建的双馈风机传动轴双质量块模型,获得风轮机和发电机之间的传动轴转矩表达式,其中,所述传动轴转矩表达式忽略风轮机转矩变化带来的影响,并将所述传动轴表示为一个不含零点的二阶系统;
24、最大传动轴转矩表达式构建单元,其用于基于获得的传动轴转矩表达式,计算当前参数信息对应的最大传动轴转矩表达式;其中,故障穿越过程中,所述传动轴转矩由稳态分量和暂态分量叠加构成,通过将发电机转矩分解为阶跃跌落和斜坡恢复两部分进行稳态分量和暂态分量的计算;
25、最快恢复时间计算单元,其用于基于所述最大传动轴转矩表达式以及预设的传动轴转矩的极限设计值,计算斜坡恢复的最快恢复时间;
26、有功恢复速率表生成单元,其用于基于获得的相关参数信息及计算得到的斜坡恢复的最快恢复时间,生成有功恢复速率表;
27、自适应整定单元,其用于基于所述有功恢复速率表设定双馈风电机组故障后的有功恢复速率。
28、根据本公开实施例的第三个方面,提供了一种电子设备,包括存储器、处理器及存储在存储器上运行的计算机程序,所述处理器执行所述程序时实现所述的一种双馈风电机组故障穿越后有功恢复自适应整定方法。
29、根据本公开实施例的第四个方面,提供了一种非暂态计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现所述的一种双馈风电机组故障穿越后有功恢复自适应整定方法。
30、与现有技术相比,本公开的有益效果是:
31、(1)本公开提供了一种双馈风电机组故障穿越后有功恢复自适应整定方法及系统,所述方案采用基于载荷特性的解析计算结果,提出的自适应的有功恢复速率整定方法,能够根据故障前风机的运行状态以及故障造成的转矩跌落程度自适应调整有功恢复速率,相比于传统固定恢复速率,可以加快有功功率恢复过程,减小有功恢复期间造成的能量缺额。
32、(2)本公开所述方案采用基于解析计算的方式评估双馈风机在故障穿越及有功恢复期间的载荷特性,结果更准确可靠,对双馈风机传动轴的设计及恢复速率的选取具有指导意义。
33、本公开附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本公开的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!