电机摆动控制方法及装置、雷达扫描组件和可读存储介质与流程
本技术涉及激光雷达,具体而言,涉及一种电机摆动控制方法及装置、雷达扫描组件和可读存储介质。
背景技术:
1、随着科学技术的不断发展,激光雷达技术在各大行业的应用越发广泛,其中车辆自动驾驶技术便是当今激光雷达技术的一个重要应用方向。对激光雷达来说,雷达扫描组件是确保激光雷达能够实现高精度且超稳定的点云扫描功能的重要器件,而在雷达扫描器件的实际应用过程中,雷达振镜电机是否能够实现锯齿波摆动功能,便是影响雷达扫描器件的激光扫描功能的重要因素。
2、目前,驱动雷达振镜电机执行锯齿波摆动动作的现有方案通常是采用高性能、高主频且带浮点运算器的高规格控制芯片在数字控制技术的基础上实现的。这种现有方案对控制芯片性能存在极高要求,方案实现成本较高,同时存在芯片货源寻觅困难问题。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种电机摆动控制方法及装置、雷达扫描组件和可读存储介质,能够在利用软件算法实现雷达振镜电机的锯齿波摆动功能的同时,有效降低控制芯片的性能要求,从而有效降低振镜电机摆动功能的实现成本及芯片供货风险。
2、为了实现上述目的,本技术实施例采用的技术方案如下:
3、第一方面,本技术提供一种电机摆动控制方法,应用于与雷达振镜电机通信连接的控制芯片,所述方法包括:
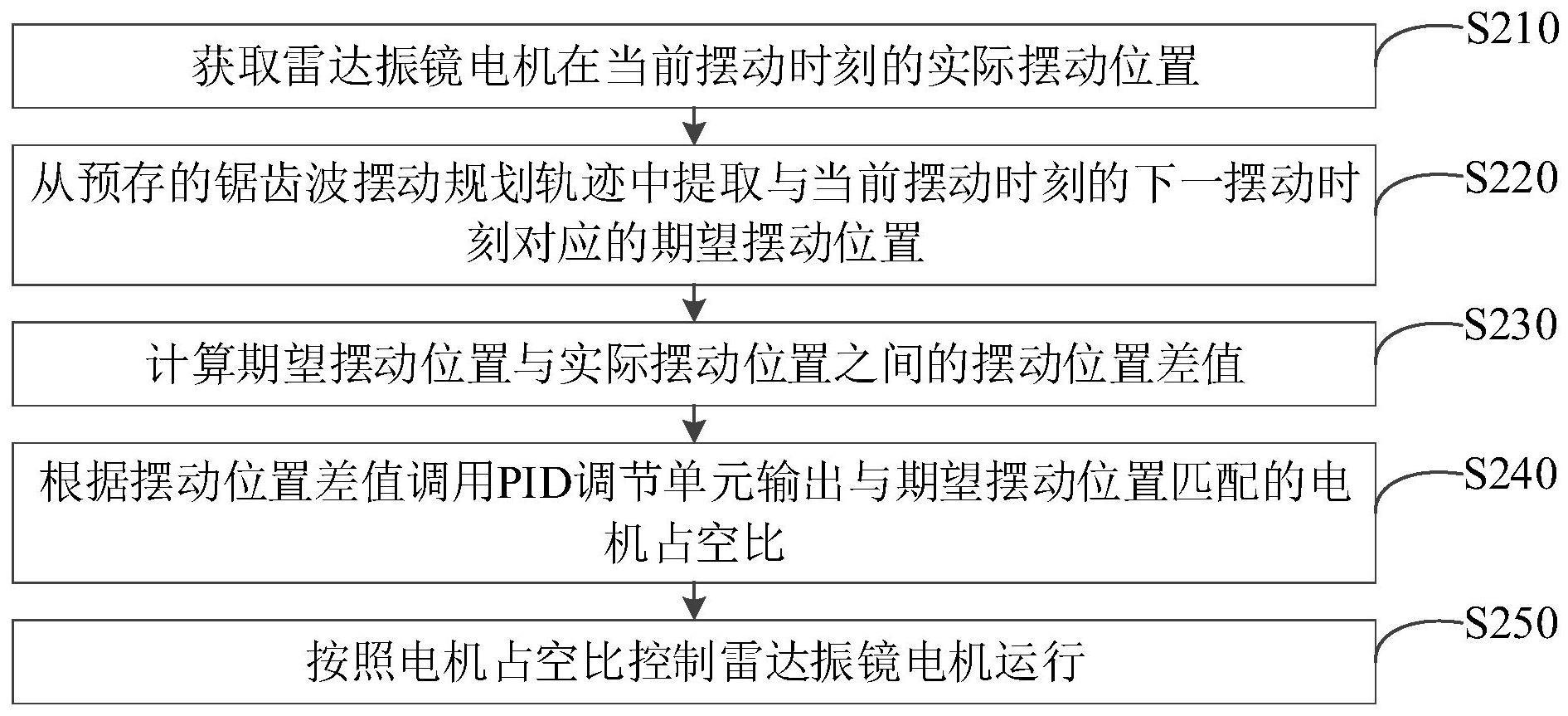
4、获取所述雷达振镜电机在当前摆动时刻的实际摆动位置;
5、从预存的锯齿波摆动规划轨迹中提取与当前摆动时刻的下一摆动时刻对应的期望摆动位置;
6、计算所述期望摆动位置与所述实际摆动位置之间的摆动位置差值;
7、根据所述摆动位置差值调用pid调节单元输出与所述期望摆动位置匹配的电机占空比;
8、按照所述电机占空比控制所述雷达振镜电机运行。
9、在可选的实施方式中,所述根据所述摆动位置差值调用pid调节单元输出与所述期望摆动位置匹配的电机占空比的步骤,包括:
10、根据所述摆动位置差值确定所述雷达振镜电机在所述下一摆动时刻所处的目标摆动时期;
11、获取与所述目标摆动时期匹配的pid控制参数调整策略;
12、按照所述pid控制参数调整策略确定所述pid调节单元在所述下一摆动时刻对应的目标pid控制参数;
13、将所述摆动位置差值输入到所述pid调节单元处,并按照所述目标pid控制参数配置所述pid调节单元,使所述pid调节单元输出所述电机占空比。
14、在可选的实施方式中,所述根据所述摆动位置差值确定所述雷达振镜电机在所述下一摆动时刻所处的目标摆动时期的步骤,包括:
15、检测所述摆动位置差值是否为正数;
16、若检测到所述摆动位置差值为正数,则确认所述目标摆动时期为正向摆动时期;
17、若检测到所述摆动位置差值不为正数,则确认所述目标摆动时期为反向摆动周期。
18、在可选的实施方式中,在所述目标摆动时期为正向摆动时期的情况下,所述按照所述pid控制参数调整策略确定所述pid调节单元在所述下一摆动时刻对应的目标pid控制参数的步骤,包括:
19、将所述摆动位置差值与所述雷达振镜电机在所述正向摆动时期内的匀速摆动递增间隔距离进行比对;
20、在所述摆动位置差值大于所述匀速摆动递增间隔距离的情况下,调高所述pid调节单元当前的p控制参数,并维持所述pid调节单元当前的i控制参数和d控制参数不变,得到所述目标pid控制参数;
21、在所述摆动位置差值等于所述匀速摆动递增间隔距离的情况下,将所述pid调节单元在所述雷达振镜电机正向匀速摆动时对应的默认pid控制参数作为所述目标pid控制参数;
22、在所述摆动位置差值小于所述匀速摆动递增间隔距离的情况下,将所述pid调节单元当前的i控制参数置为零,并维持所述pid调节单元当前的p控制参数和d控制参数不变,得到所述目标pid控制参数。
23、在可选的实施方式中,在所述目标摆动时期为反向摆动时期的情况下,所述按照所述pid控制参数调整策略确定所述pid调节单元在所述下一摆动时刻对应的目标pid控制参数的步骤,包括:
24、将所述摆动位置差值的绝对值与所述雷达振镜电机在所述反向摆动时期内的匀速摆动递减间隔距离进行比对;
25、在所述摆动位置差值的绝对值大于所述匀速摆动递减间隔距离的情况下,将所述pid调节单元当前的i控制参数置为零,并维持所述pid调节单元当前的p控制参数和d控制参数不变,得到所述目标pid控制参数;
26、在所述摆动位置差值的绝对值等于所述匀速摆动递减间隔距离的情况下,将所述pid调节单元在所述雷达振镜电机反向匀速摆动时对应的默认pid控制参数作为所述目标pid控制参数;
27、在所述摆动位置差值的绝对值小于所述匀速摆动递减间隔距离的情况下,调高所述pid调节单元当前的p控制参数,并维持所述pid调节单元当前的i控制参数和d控制参数不变,得到所述目标pid控制参数。
28、在可选的实施方式中,所述方法还包括:
29、获取针对所述雷达振镜电机的锯齿波摆动需求参数,并按照所述锯齿波摆动需求参数针对所述雷达振镜电机规划得到对应的锯齿波摆动规划轨迹。
30、第二方面,本技术提供一种电机摆动控制装置,应用于与雷达振镜电机通信连接的控制芯片,所述装置包括:
31、实际位置获取模块,用于获取所述雷达振镜电机在当前摆动时刻的实际摆动位置;
32、期望位置提取模块,用于从预存的锯齿波摆动规划轨迹中提取与当前摆动时刻的下一摆动时刻对应的期望摆动位置;
33、位置差值计算模块,用于计算所述期望摆动位置与所述实际摆动位置之间的摆动位置差值;
34、控制参数输出模块,用于根据所述摆动位置差值调用pid调节单元输出与所述期望摆动位置匹配的电机占空比;
35、电机运行控制模块,用于按照所述电机占空比控制所述雷达振镜电机运行。
36、在可选的实施方式中,所述装置还包括:
37、摆动轨迹规划模块,用于获取针对所述雷达振镜电机的锯齿波摆动需求参数,并按照所述锯齿波摆动需求参数针对所述雷达振镜电机规划得到对应的锯齿波摆动规划轨迹。
38、第三方面,本技术提供一种雷达扫描组件,所述雷达扫描组件包括相互通信连接的控制芯片及雷达振镜电机;
39、所述控制芯片存储有pid调节单元及计算机程序,并可执行所述计算机程序,以调用所述pid调节单元实现前述实施方式中任意一项所述的电机摆动控制方法。
40、第四方面,本技术提供一种可读存储介质,其上存储有计算机程序,所述计算机程序被与雷达振镜电机通信连接的控制芯片执行时,实现前述实施方式中任意一项所述的电机摆动控制方法。
41、在此情况下,本技术实施例的有益效果可以包括以下内容:
42、本技术通过获取雷达振镜电机在当前摆动时刻的实际摆动位置,并从预存的锯齿波摆动规划轨迹中提取与当前摆动时刻的下一摆动时刻对应的期望摆动位置,而后计算期望摆动位置与实际摆动位置之间的摆动位置差值,并根据摆动位置差值调用pid调节单元输出与期望摆动位置匹配的电机占空比,接着按照电机占空比控制雷达振镜电机运行,使雷达振镜电机能够按照锯齿波摆动规划轨迹进行锯齿波摆动,从而在利用软件算法实现雷达振镜电机的锯齿波摆动功能的同时,有效降低控制芯片的性能要求,以有效降低振镜电机摆动功能的实现成本及芯片供货风险。
43、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!