基于消隙策略的双电机模型预测位置控制装置和方法
本发明涉及定日镜多伺服驱动系统,特别涉及一种基于消隙策略的双电机模型预测位置控制装置和方法。
背景技术:
1、随着社会生产力发展,人们生活水平不断提高,我们对能源的需求不断增加。目前大部分使用的是化石能源,但是化石能源的过度使用,已经造成了日益严重的环境污染、气候变化、自然灾害增加等不良影响。人类也逐渐意识到不可再生的化石能源逐渐枯竭所带来的能源危机。所以可再生能源的开发利用是目前全球发展的重点之一。
2、在众多可再生能源中,太阳能由于具有储量大、分布广无地域限制、使用安全无害、可长久开发使用等诸多优点,成为未来社会的理想能源之一,在未来的能源战略中占有重要的地位。
3、定日镜作为塔式太阳能光热发电站的重要组成部分,其作用是通过调节俯仰角和方向角,将太阳光集中反射到集热塔顶部的吸热器上,加热管道中的熔融盐,熔融盐再跟汽轮机组中的热工质进行换热生产高温蒸汽,驱动汽轮机组发电。因此精确跟踪太阳光的照射角度成为定日镜的首要任务,其运动精度直接影响太阳能的采集,从而影响发电站的太阳能利用率进而影响发电效率,这对定日镜的运动控制精度提出了较高要求。
4、相比于单伺服驱动,多伺服驱动系统可由多台小功率电机驱动以提高控制精度,且可以通过施加偏置力矩来锁定负载以实现精确的位置控制。另外,定日镜的重量和惯量一般都较大,同时受风力的影响也较大,具有大惯量、大扰动的特点,采用多伺服系统驱动可以输出高转矩,提高系统的整体驱动能力和过载能力。
5、然而,由于多伺服驱动系统常采用齿轮传动方式,会产生齿隙现象。齿隙现象是指齿轮传动环节中由间隙引起的位置误差所产生的非线性现象,该现象主要发生在驱动电机换向时刻。由于齿隙的存在,当系统驱动力矩转换方向时会出现空回现象,即驱动力矩无法传递到从动部分,导致从动部分暂时不可控,引起齿隙输入端与输出端之间的偏差从而增大系统的输出误差,对多伺服驱动系统的控制精度造成了巨大的负面影响,不利于定日镜角度的精确控制。
6、因此,为了尽可能减小定日镜多伺服驱动系统中传动齿隙的影响,实现定日镜角度的精确控制,可以对双电机系统从速度或位置两方面进行调节或控制。
7、基于此缺陷,本发明提出了一种基于消隙策略的双电机模型预测位置控制装置和方法,对双电机系统从位置控制方面减小甚至消除定日镜多伺服驱动系统中传动齿隙的影响,以实现定日镜角度的精确控制。
技术实现思路
1、本发明的目的是提供一种基于消隙策略的双电机模型预测位置控制装置和方法,对双电机系统从位置控制方面减小定日镜多伺服驱动系统中传动齿隙的影响以实现定日镜角度的精确控制。
2、为实现上述目的,本发明提供如下技术方案:
3、本发明在第一方面提供了一种基于消隙策略的双电机模型预测位置控制装置,基于带有齿隙环节的双电机系统,所述装置是基于消隙策略的双电机系统模型预测速度控制,包括基于消隙策略的双电机系统动力学模型和模型预测位置控制器;
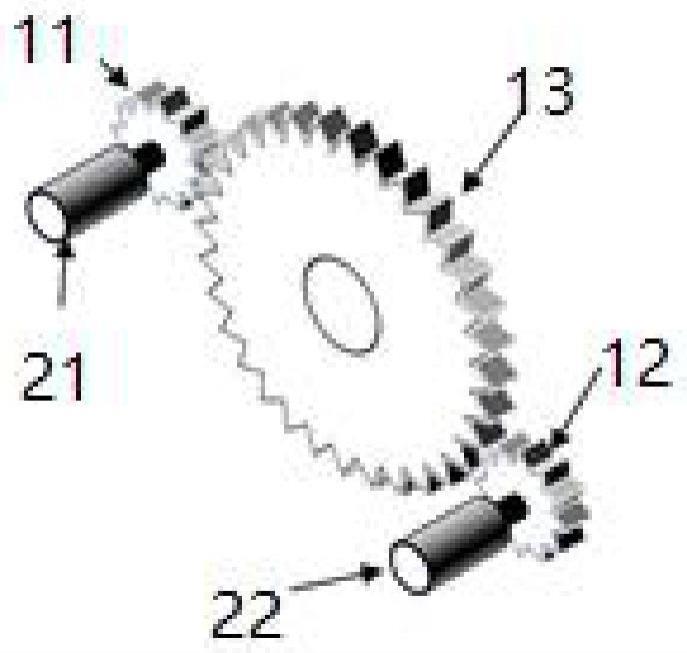
4、所述基于齿隙死区模型的双电机系统动力学模型是基于驱动电机一和驱动电机二驱动负载运动,驱动电机一、驱动电机二与负载之间分别通过驱动齿轮一、驱动齿轮二、负载齿轮实现力矩传递;
5、所述模型预测位置控制器包括负载位置估计、状态预测模型、滚动优化和扩张状态观测器,参考位置作为模型预测位置控制器的输入,经过滚动优化,得到负载所需总力矩,经过消隙策略进行力矩分配得到驱动电机一和驱动电机二所需的力矩tm1和tm2,对负载的实际位置进行估计反馈给模型预测位置控制器进行闭环控制。
6、本发明在第一方面提供了一种优选方案,所述消隙策略利用双电机消隙原理:在起动和换向的过程中通过两个驱动齿轮在负载齿轮上增加方向相反的偏置力矩tm1和tm2,一驱动齿轮提供动力矩,另一驱动齿轮提供阻力矩;在启动与换向结束后停止施加偏置力矩,由两个驱动齿轮共同提供动力矩来带动负载齿轮运动。
7、本发明在第一方面提供了一种优选方案,所述消隙策略为:当负载力矩为0,参考力矩为0时,两台驱动电机分别提供给负载大小相等、方向相反的偏置力矩抱紧负载,使负载不会在齿隙中自由转动;当负载需要正向转动时,参考力矩正向增大,tm1逐渐增大,tm2逐渐减小,合力矩逐渐增加,负载开始正向转动,此时两驱动电机齿轮仍然紧贴电机,实现无齿隙传动;当参考力矩继续增大,超过t1时,负载所需力矩完全由电机一提供,此时电机二将随负载齿轮转动,不提供动力;此后通过电机力矩和负载力矩作用使驱动齿轮和负载齿轮保持接触;当参考力矩继续增大,超过t2时,电机一保持恒定力矩t2,电机二力矩开始增加;当参考力矩超过t3后,两电机平均分配所需力矩。
8、本发明在第一方面提供了一种优选方案,所述基于消隙策略的双电机系统动力学模型,其建立是在消隙策略下,齿隙在任何时刻都被消除,相邻齿轮总是处于紧密贴合状态,双电机系统视为一个整体,在任何时刻三个齿轮的速度都相同,位置只相差一个初始情况的齿隙宽度,以此对双电机系统整体进行动力学建模。
9、本发明在第一方面提供了一种优选方案,所述状态预测模型采用带有一拍滞后补偿的控制流程:在第k时刻,输入上一时刻计算得到的最优输入并读取当前时刻系统状态xk,接着使用双电机系统模型和当前时刻状态xk预测下一时刻系统状态然后使用预测得到的计算k+1时刻的最优输入并在k+2时刻作用于双电机系统。
10、本发明在第二方面提供了一种基于消隙策略的双电机系统模型预测位置控制方法,包括如下步骤:
11、(1)在当前控制周期下,给定参考位置输入,获取两个驱动电机的转子位置;
12、(2)根据两个驱动电机的转子位置获得负载估计位置;
13、(3)通过扩张状态观测器计算系统外部扰动;
14、(4)根据当前时刻的输入力矩和负载估计位置通过预测模型获得负载预测位置,并将外部扰动参与到预测模型预测负载位置的过程,对扰动因素造成的影响进行补偿;
15、(5)将预测输出作为系统当前状态进行优化问题求解,得到下一时刻双电机系统最优输入力矩,实现一拍滞后补偿;
16、(6)获得两台驱动电机的最优输入力矩,并作用于下一控制周期。
17、与现有技术相比,上述技术方案具有以下有益技术效果:
18、(1)本发明对定日镜多伺服驱动系统在位置控制方面,提出了改进变偏置力矩分配方式的消隙策略,并建立了基于消隙策略的双电机系统模型,结合该模型设计了基于消隙策略的模型预测位置控制器与控制系统,利用扩张状态观测器估计外部扰动对预测误差进行补偿。本发明设计的控制器可以消除定日镜多伺服系统中传动齿隙的影响,实现响应速度快、定位精度高的位置控制效果。
19、(2)本发明采用变偏置力矩分配的消隙策略,既消除了齿隙的影响,又解决了电机效率和受力不均的问题,降低了消隙作用对系统其他性能的影响,能够在某种程度上同时兼顾系统消隙与同步的复合要求。
20、(3)本发明采用模型预测控制进行控制器设计,与传统的pid控制方案相比,可以兼顾快速性与超调的控制性能,同时实现快速与无超调;并拥有良好的动态响应特性,兼顾稳态响应与动态响应性能。由于本控制器的应用场景为齿轮传动,为减少齿轮磨损,希望跟踪响应不发生突变,同时又希望响应迅速,因此期望跟踪曲线呈现起步、终止慢,中间快的趋势(如图10示)。pid是基于误差的控制方案,在追求稳态响应的同时无法兼顾上述动态响应要求;而模型预测控制通过带约束优化问题求解中的约束环节可以实现此目的,因此模型预测控制更符合齿轮传动的应用场景。
21、(4)本发明设计了带有消隙策略的控制器,对齿隙大小不敏感,与传统控制器相比增加了控制系统的鲁棒性。传统的控制策略是基于齿隙宽度进行补偿控制,所以需要获取齿隙宽度。而齿隙宽度不准会对控制器性能产生显著影响。齿隙宽度可基于传感器获得,但传感器安装、维修不方便、传感器尺寸不合适等都会导致机械结构的不协调甚至破坏。基于观测器获取齿隙宽度的方法又存在观测器跟踪效果不好等诸多问题。因此基于齿轮间隙宽度的补偿策略在实际应用中不好进行,本发明通过带有消隙策略的控制器良好地解决了这一问题。
- 还没有人留言评论。精彩留言会获得点赞!