用于操作电驱动单元的方法、数据处理设备和电驱动单元与流程
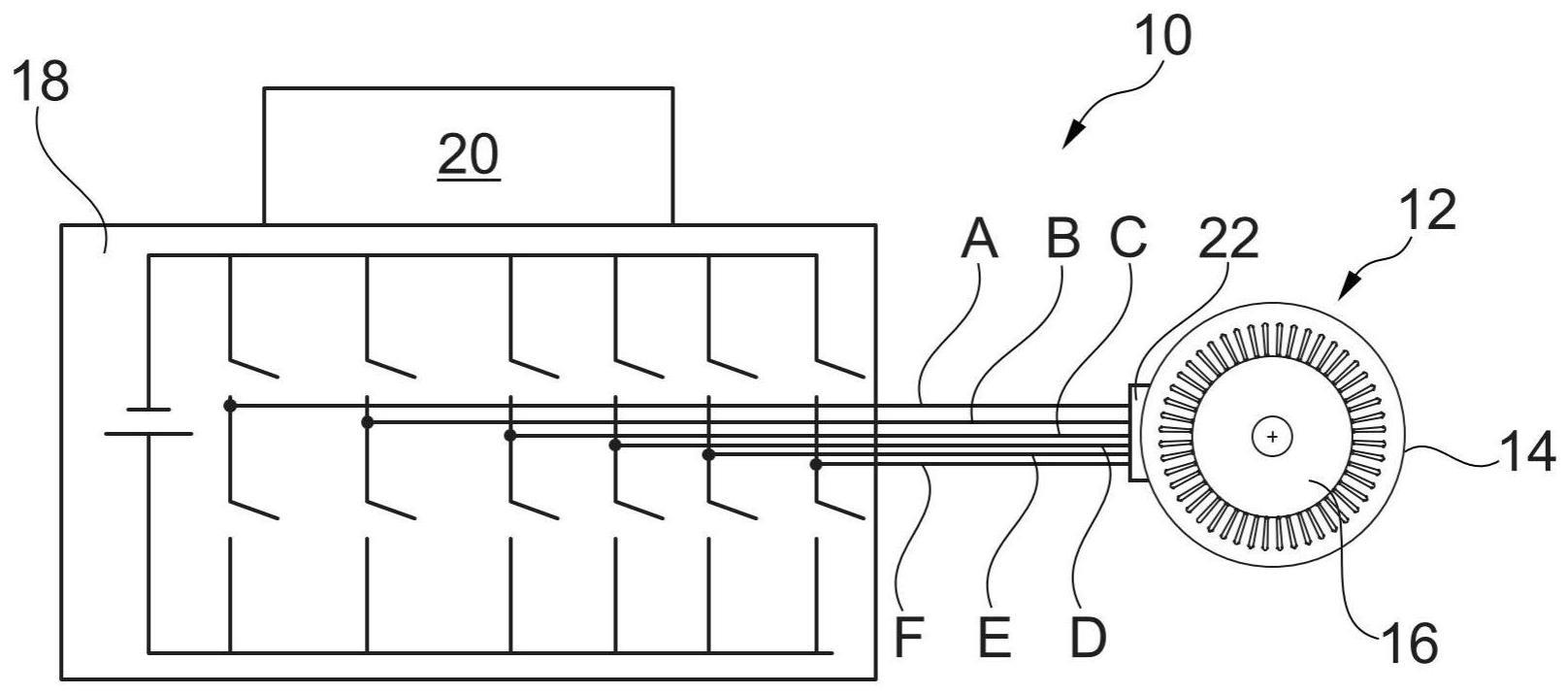
本公开涉及一种用于操作电驱动单元的方法。电驱动单元包括具有定子和转子的电机。定子包括相绕组集。此外,电驱动单元包括逆变器,用于通过选择性地向相绕组提供ac信号来控制电机的运行。逆变器电耦合到相绕组。附加地,本公开涉及一种包括用于执行这种方法的部件的数据处理设备,以及一种包括这种数据处理设备的电驱动单元。
背景技术:
1、上述类型的电驱动单元例如用于电动交通工具中,诸如电池电动交通工具或混合电动交通工具。这些交通工具可以是陆地交通工具、空中交通工具或水上交通工具。
2、逆变器用于将由电池单元提供的直流电(dc)转换成供给电机的交流电(ac)。
3、在这种电驱动单元中,除了用于驱动电机的期望信号效应之外,还可能出现不期望的信号效应。不期望的信号效应可能例如由逆变器内的开关事件引起。
4、如果电机以高速或高加速度和减速度运行,则电驱动单元的用户,即装备有电驱动单元的交通工具的用户,可能会特别注意到这种不期望的信号效应。这可能是与动态和主动驱动风格相关的情况。不期望的信号效应可能附加地引发干扰。不期望的信号效应和对应的干扰可能会损害驾驶体验。
技术实现思路
1、因此,本公开的目的是关于不期望的信号效应和对应的电磁干扰来改进电驱动单元。
2、通过本公开的独立权利要求的主题至少部分地解决或减轻了该问题,其中在从属权利要求中并入了进一步的示例。
3、根据第一方面,提供了一种用于操作电驱动单元的方法。电驱动单元包括具有定子和转子的电机。定子包括相绕组集。此外,电驱动单元包括逆变器,用于通过向相绕组提供ac信号来控制电机的运行。逆变器电耦合到相绕组。该方法包括:
4、-为第一子集的相绕组的每个相绕组触发ac驱动信号,使得转子经由第一子集的相绕组旋转,
5、-触发对于第二子集的相绕组的至少一个相绕组的噪声补偿措施,以补偿不期望的信号效应,其中第一子集的相绕组和第二子集的相绕组是无重叠的。
6、在本文中,相绕组应被理解为定子的绕组扇区。这种绕组扇区可以单独或者与其他扇区一起归属于电机的某一相。因此,相绕组或绕组扇区也可以被指定为相绕组的或可替代的夹(hairpin)的线绞束。在一个纯粹说明性示例中,电机可以是五相电机。对应的定子可以包括总共五个绕组扇区,即定子包括五个相绕组。因此,五相中的每一相包括一个单相绕组或绕组扇区。在这种情况下,只有三个相绕组或绕组扇区可以属于第一子集的相绕组,并且可以用于旋转转子。剩余的两个相绕组或绕组扇区可以属于第二子集,并且可以用于补偿不期望的信号效应。因此,电机像三相电机一样运行,而不会损害运行。在另一个纯粹说明性示例中,电机也还可以是五相电机。然而,现在对应的定子可以包括总共十个绕组扇区,即定子包括十个相绕组。因此,两个相绕组或绕组扇区归属于五相中的每一相。在这种情况下,五个相绕组可以属于第一子集的相绕组,而剩余五个相绕组可以属于第二子集的相绕组。在该示例中,电机可以作为五相电机运行,然而每相仅使用一个相绕组或绕组扇区,而不是使用两个相绕组或绕组扇区。剩余的相绕组或绕组扇区用于补偿不希望的信号效应。因此,更一般地说,定子的第二子集的相绕组用于补偿不期望的信号效应的事实可能具有以下结果:要么更少的相用于旋转转子,要么每相的更少的相绕组或相绕组扇区用于旋转转子。不期望的信号效应也可以归类为噪声。这种不期望的信号效应或噪声的示例是所谓的高频尖峰,其由例如使用正弦脉宽调制控制的逆变器的开关事件引起。这些高频尖峰是逆变器实际所期望的正弦输出信号中包含的高次谐波。特别是在高频地开关逆变器时,会在高频带生成明显的噪声。通过触发噪声补偿措施,不期望的信号效应被完全地或部分地补偿。这意味着不期望的信号效应被消除或者至少被衰减。换句话说,使用适当的补偿措施,可以定制由逆变器提供的信号的频率内容。因此,消除或至少减少了对驾驶体验的负面效应。由于噪声补偿措施,电驱动单元周围的电子组件(所谓的受害者)的运行也得到了改善,即更少受到噪声的影响。这适用于使用有线信号连接和无线信号连接的电子组件。在后一种情况下,由天线发射的信号质量得到增强。总之,改善了用户的无线连接体验。附加地,交通工具的信号完整性得以保持。
7、在根据本公开的方法中,触发的ac驱动信号在电机中生成扭矩。与之相反,触发的噪声补偿措施的信号不会在电机中生成扭矩,或者至少不旨在生成转矩。
8、不期望的信号效应可以是不期望的电磁干扰效应。
9、电机可以是同步电机。对于这种机器,转子轴的旋转与电源电流的频率同步,因为在定子中产生了旋转磁场。电源电流由逆变器提供。在这种情况下,基波电流谐波与运行速度和电机拓扑相关。附加地,逆变器的开关操作会造成电流纹波,其将调制基波电流。具有高电压梯度的开关事件可能生成电流,造成电机的绕组线绞之间的绕组电容。附加地,开关操作可能会引起电压纹波,其将感应电流馈送到逆变器附近的电缆和电路中的杂散电容。如果不加以控制,这种效应将造成差模发射。在这种情况下,差模发射将被理解为在受影响的电路中感应电流的电磁发射,其中该电流与电路中的期望电流相反。使用根据本公开的方法,用于例如定制的电压信号或定制的电流信号的噪声补偿措施能够抑制规定带宽的电流的至少一些频谱分量,并且因此减轻或消除上述效应。
10、电驱动单元例如是交通工具的电驱动单元。因此,电驱动单元可以被指定为交通工具电驱动单元。注意,根据本公开的方法和对应的驱动单元可以应用于陆地交通工具、空中交通工具和水上交通工具。
11、在一个示例中,当执行根据本公开的方法时,电驱动单元的电机以电动马达模式运行。
12、在另一个示例中,执行根据本公开的方法,同时电驱动单元以发电机模式运行。根据本公开的方法可以实时的执行。
13、另外要注意的是,电驱动单元的电机可以包括多于一个的定子和/或多于一个的转子。
14、在另一个示例中,定子的相绕组是所谓的集中绕组。集中绕组的特征在于相绕组或绕组扇区的所有匝具有相同的磁轴。
15、在另一个示例中,第二子集的相绕组包括至少两个相绕组或绕组扇区。这提供了以对称方式布置第二子集的相绕组的可能性。
16、注意,根据本公开的方法当然只能应用于不需要使用所有相绕组来旋转转子的运行情况。换句话说,如果电驱动单元在部分负荷下运行,则可以应用根据本公开的方法。这适用于大多数运行情况。
17、也可以在电驱动单元在满负荷下运行的情况下应用根据本发明的方法。在这种情况下,使用了大多数电驱动单元至少暂时地在超负荷模式下运行的能力。因此,即使在满负荷情况下,也可以使用本方法的噪声补偿措施。
18、在一个示例中,触发对于第二子集的至少一个相绕组的噪声补偿措施包括触发对于至少一个相绕组的零电流和/或零电压。因此,第二子集的相绕组或绕组扇区没有被提供电流和/或电压。这对于第一子集的相绕组中不期望的信号效应具有衰减作用。如上面已经解释的,这可能引起少于电机的总相数被用于旋转转子的事实。五相电机可以例如被用作三相电机。
19、在一个示例中,电机可以使用少于所有可用相来运行,例如,仅使用五相电机的三相或四相。在这种情况下,可以应用所谓的矢量控制策略。此外,控制策略可以包括保持磁动势恒定。这意味着磁动势从使用所有可用相的情况到使用少于所有相的情况不会发生改变。换句话说,即使使用数量减少的相绕组,磁动势也保持恒定。因此,必须调整剩余的相电流。如上所述的磁动势可以是空气间隙中的圆周旋转磁动势。当然,在使用少于所有可用相的情况下,磁动势必须不能失真。当调整剩余相电流时,附带条件可以是剩余相的相应电流矢量具有相同的幅度。总之,电机可以使用少于所有可用相的相来运行。
20、在另一个示例中,触发对于第二子集的至少一个相绕组的噪声补偿措施包括触发对于至少一个相绕组的非零补偿信号。因为补偿信号与不期望的信号效应之和小于不期望的信号效应,所以非零补偿信号的提供引起不期望的信号效应的消除或衰减。
21、在这个示例中,触发的非零补偿信号可能与第一子集的相绕组的相绕组的ac驱动信号不一致。因此,可以抑制不期望的信号效应,诸如电流纹波。
22、在一个示例中,第二子集的相绕组分布在定子上。在一个示例中,第二子集的相绕组可以均匀地分布或者以平衡的方式分布。这可以以几何意义、电学意义、磁学意义和力学意义中的至少一种来理解。在所有情况下,在定子上分布第二子集的相绕组引起电机的平稳运行。
23、在一个示例中,该方法还包括接收至少一个电信号参数,该电信号参数表征至少一个相绕组的随时间的不期望的信号效应。电信号参数例如是电流或电压。电信号参数还可以与频率、相移的幅度中的至少一个相关。因此,不期望的信号效应可以通过电信号参数来描述。因此,可以触发适当的和特定的噪声补偿措施。
24、电信号参数可以由对应的传感器单元提供。
25、可替代地,电信号参数可以由不期望的信号效应的模型提供。基于该模型,可以以高效的方式导出电信号参数。
26、在一个示例中,电流传感器和/或电压传感器被布置在每个相绕组中或者相绕组和逆变器之间的对应连接中。相应地,可以计算电压和/或电流,并专门为每个相绕组提供电压和/或电流。
27、注意,表征不期望的信号的电信号参数可以通过从期望的信号和不期望的信号的和信号中减去期望的信号来导出。
28、在一个示例中,该方法还包括分析至少一个电信号参数并导出表征预测的不期望的信号效应的电信号参数预测。电信号参数预测例如是电流或电压。电信号参数预测还可以与频率、相移的幅度中的至少一个相关。可替代地或附加地,电信号参数预测可以与占空比或定时相关。换句话说,提供了关于不期望的信号效应的预测。这有助于有效且高效地补偿这种不期望的信号效应。
29、在一个示例中,分析至少一个电信号参数包括应用机器学习技术和/或应用人工智能。这可以例如包括使用自回归集成移动平均算法和/或遗传算法。机器学习技术和人工智能是导出电信号参数预测的有效且高效的方式。因此,可以触发特定的补偿措施。
30、在一个示例中,该方法还包括触发作为电信号参数预测的函数的非零补偿信号。因此,补偿信号适应于预测。这引起非常有效的补偿结果。
31、在一个示例中,该方法还包括触发作为预测的不期望的信号效应的逆的非零补偿信号。该逆也可以称为计数器信号。该信号能够抑制规定带宽的电流的至少一些频谱分量。因此,不期望的信号效应被中和或消除。
32、在一个示例中,该方法还可以包括触发将随机元素集成到用于第一子集的相绕组的至少一个相绕组的ac驱动信号中。随机元素是信号元素。与ac驱动信号相比,随机元素可能较小。从文献中已知,这种随机元素能够降低信号中的噪声。这是由于随机元素减少了干扰效应和周期信号的谐波。随机元素可以由某个间隔和与之相关的信号参数来定义。例如,信号的定时可以在+/-0.01秒的间隔内随机化。
33、在一个示例中,随机元素可以包括随机调制信号。这意味着随机元素通过调制集成到ac驱动信号中。这是集成随机元素的简单而有效的方法。
34、可替代地或附加地,随机化脉冲位置调制、随机化脉冲宽度调制和异步开关方案中的至少一种可以用于集成随机元素。
35、在一个示例中,该方法还可以包括触发将耦合元素集成到第一子集的相绕组的至少一个相绕组的ac驱动信号中,以实现至少一对相绕组之间的电感或电容电磁耦合。耦合元素也是信号元素。该信号元素被特别设计成使得至少一对相绕组被电感或电容耦合。因此,可能会故意产生电磁干扰。如果这种电磁干扰适合于不期望的信号效应,则它在补偿这种不期望的效应方面是非常有效的。
36、该方法可以至少部分地由计算机实施,并且可以在软件或硬件中实施,或者在软件和硬件中实施。此外,该方法可以由在提供数据处理功能的部件上运行的计算机程序指令来执行。数据处理部件可以是合适的计算部件,诸如电子控制模块,诸如交通工具控制系统或嵌入式系统,其也可以是分布式计算机系统。数据处理部件或计算机可以分别包括一个或多个处理器、存储器、数据接口等。还应当理解,该方法也可以由云计算服务和/或边缘计算资源来执行。
37、根据第二方面,提供了一种数据处理设备,包括用于执行本公开的方法的部件。这种数据处理设备能够触发噪声补偿措施来补偿不期望的信号效应。因此,不期望的信号效应被消除或衰减。因此,消除或至少减少了对驾驶体验的负面效应。
38、在一个示例中,还提供了一种计算机程序。该计算机程序包括指令,当该程序由计算机运行时,该指令使得计算机执行根据本公开的方法。
39、此外,在另一个示例中,可以提供包括指令的计算机可读存储介质,当由计算机运行时,该指令使得计算机执行根据本公开的方法。
40、根据第三方面,提供了一种电驱动单元,包括具有定子和转子的电机。定子包括相绕组集。此外,电驱动单元包括逆变器,用于通过选择性地向相绕组提供ac信号来控制电机的运行。逆变器电耦合到相绕组。此外,电驱动单元包括根据本公开的数据处理设备。数据处理设备通信地耦合到逆变器。因此,在这种电驱动单元中,可以有效且高效地消除或衰减不期望的信号效应。因此,消除或至少减少了对驾驶体验的负面效应。换句话说,这种电驱动单元运行相对平稳。
41、如前面已经提到的,定子的相绕组可以是集中绕组。
42、在一个示例中,定子包括至少三相,其中至少一个相绕组或绕组扇区归属于每个相。当然,多于一个的相绕组或绕组扇区也可以归属于每个相。
43、在一个示例中,转子可以包括相绕组集。换句话说,转子不包括永磁体。众所周知,这种马达在运行时噪音很大。然而,由于本公开中概述的补偿措施,这种马达可以以平稳的方式运行。
44、应该注意的是,不管所涉及的方面如何,上述示例可以彼此组合。
45、参考下文描述的示例,本公开的这些和其他方面将变得显而易见并得到阐述。
- 还没有人留言评论。精彩留言会获得点赞!