一种带死区时间补偿的永磁同步电机四段无差拍控制方法与流程
本发明涉及无差拍电机控制,更具体地,涉及一种带死区时间补偿的永磁同步电机四段无差拍控制方法、系统、电子设备及存储介质。
背景技术:
1、永磁同步电动机的固有优势,永磁同步电机的应用和研究越来越广泛和深入,永磁同步电机的控制策略越来越丰富。在各种控制策略中,无差拍控制策略具有简单、动态响应快、无超调等优点,受到学者们的青睐。但是,传统的矢量控制方法计算成本大,并且总谐波失真(thd)高。同时,传统的控制策略的优化方向主要集中在稳态性能上,但对开关频率的优化很少。
技术实现思路
1、本发明针对现有技术中存在的技术问题,提供一种带死区时间补偿的永磁同步电机四段无差拍控制方法,其解决了计算资料耗费较大、开关频率优化不佳等问题。
2、根据本发明的第一方面,提供了一种带死区时间补偿的永磁同步电机四段无差拍控制方法,包括:
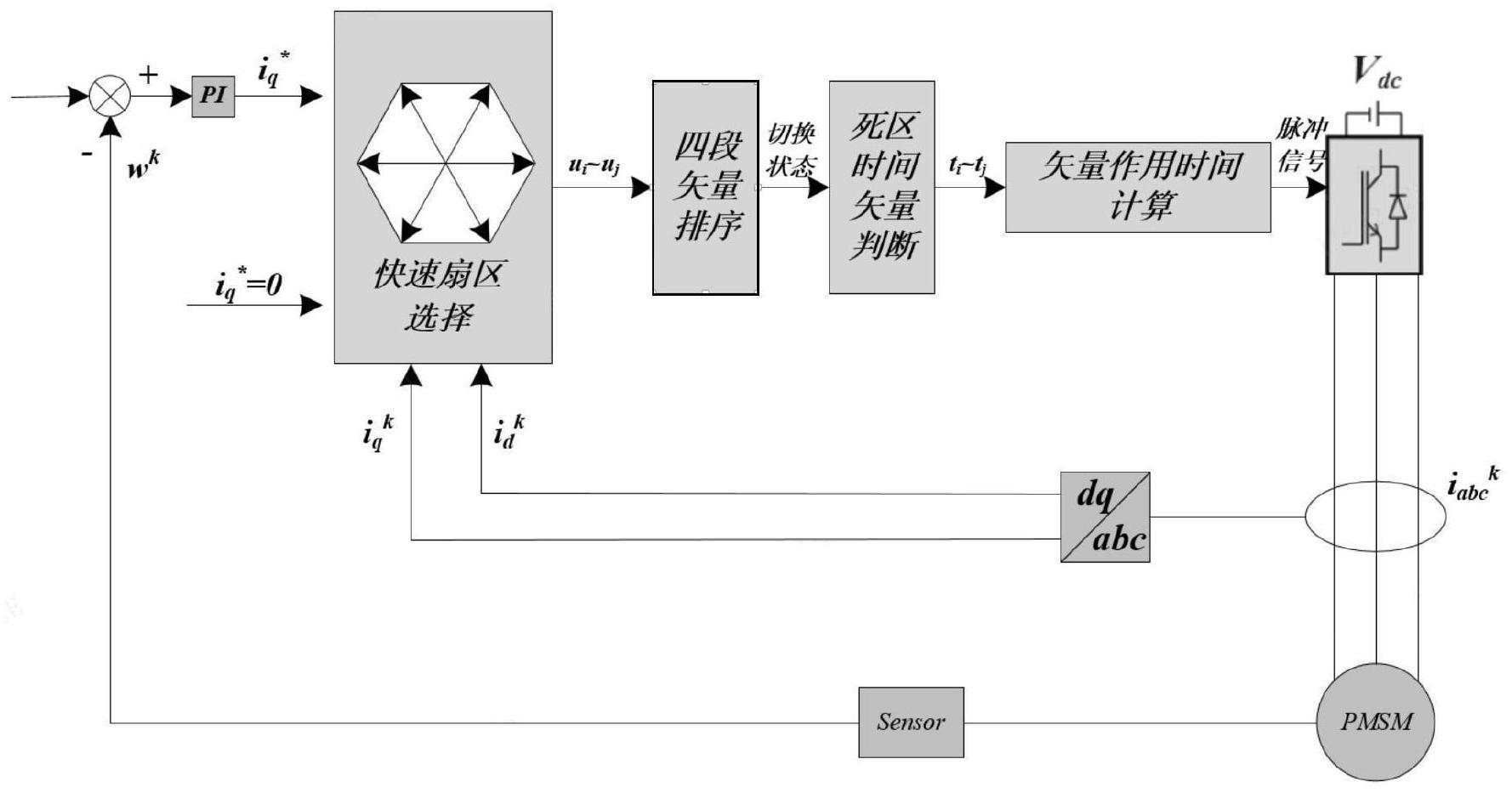
3、根据获取的电机三相电压矢量选择对应的扇区;将当前扇区的控制周期分为四段并进行排序,其中第一段与第四段采用零矢量,第二段和第三段采用当前扇区的两个非零矢量;相邻段之间具有死区;
4、根据死区效应判断电机逆变器中出现死区的桥臂,根据所述桥臂的电流流向得到死区矢量;
5、基于无差拍原理计算当前扇区控制周期内的零矢量总动作时间和两个非零矢量动作时间;基于最小脉动理论、根据电流矢量和死区矢量计算零矢量总动作时间中第一段零矢量动作时间与第四段零矢量动作时间;采用当前扇区的各段动作时间对死区时间进行补偿,以生成逆变器的脉冲控制信号。
6、在上述技术方案的基础上,本发明还可以作出如下改进。
7、可选的,所述根据获取的电机三相电压矢量选择对应的扇区;包括:
8、采样电机逆变器的三相电流,将三相电流进行clark-park变换,转换为基于dq坐标系的电压矢量,基于空间矢量图、根据所述电压矢量判断当前所属的扇区。
9、可选的,所述将当前扇区的控制周期分为四段并进行排序,其中第一段与第四段采用零矢量,第二段和第三段采用当前扇区的两个非零矢量;相邻段之间具有死区;包括:
10、当前扇区的控制周期内包含零矢量和两个非零矢量,其中,两个非零矢量包括所述电压矢量在dq坐标系的分量:矢量ui和矢量uj;
11、将所述零矢量分为第一零矢量和第二零矢量;
12、将当前扇区的控制周期分为四段,第一段放置第一零矢量、第二段放置矢量ui、第三段放置矢量uj、第四段放置第二零矢量;
13、第一段与第二段之间为第一个死区d1,第二段与第三段之间为第二个死区d2,第三段与第四段之间为第三个死区d3。
14、可选的,所述根据死区效应判断电机逆变器中出现死区的桥臂,根据所述桥臂的电流流向得到死区矢量;包括:
15、根据死区效应判断电机逆变器中出现死区的桥臂;
16、根据所述桥臂的电流流向判断所述桥臂的等效开关状态;
17、保持其他相的开关状态不变,根据当前桥臂的等效开关状态,来获得当前桥臂所在相的等效电压矢量,根据所述等效电压矢量得到三个死区矢量id1、id2和id3。
18、可选的,所述基于无差拍原理计算当前扇区控制周期内的零矢量总动作时间和两个非零矢量动作时间,包括:
19、基于无差拍原理,根据电压与电流的对应关系,当前扇区的控制周期内,矢量ui和矢量uj对应的非零矢量动作时间满足以下关系:
20、ti=((id*-id(k)-a)(sqj-sqz)+(iq*-iq(k)-b)(sdz-sdj)+ts(sqzsdj-sqjsdz))/c
21、tj=((id*-id(k)-a)(sqz-sqi)+(iq*-iq(k)-b)(sdi-sdz)+ts(sqisdz-sqzsdi))/c
22、tz=ts-3td-ti-tj,
23、a=(sdd1+sdd2+sdd3)td
24、b=(sqd1+sqd2+sqd3)td
25、c=sqzsdj+sqisdz+sqjsdi-sqisdj-sqjsdz-sqzsdi
26、其中,ti为有效电压矢量ui的动作时间,tj为无效电压矢量uj的动作时间,id*为dq坐标系中d轴参考电流,iq*为dq坐标系中q轴参考电流,id(k)为在初始时刻k的d轴电流,iq(k)为在初始时刻k的q轴电流,sdi为d轴有效电压矢量ui对应的电流斜率,sdj为d轴无效电压矢量uj对应的电流斜率,sdz是d轴零矢量对应的电流斜率,sqi是q轴有效电压矢量ui对应的电流斜率,sqj是q轴无效电压矢量uj对应的电流斜率,sqz为q轴零矢量对应的电流斜率,sdd1为第一个死区d1的d轴电流斜率,sdd2为第二个死区d2的d轴电流斜率,sdd3为第三个死区d3的d轴电流斜率,sqd1为第一个死区d1的q轴电流斜率,sqd2为第二个死区d2的q轴电流斜率,sqd3为第三个死区d3的q轴电流斜率,ts为控制周期时间,tz为零矢量的总动作时间,td为单个死区时间,死区时间td设有初始值。
27、可选的,所述基于最小脉动理论、分别计算第一段与第四段的零矢量动作时间;包括:
28、根据最小脉动理论,当前扇区的控制周期符合下式:
29、(irip)2=(m0+md1+mi+md2+mj+md3+m0*)/ts
30、
31、
32、
33、
34、
35、
36、
37、其中,irip为纹波电流,mo为第一零矢量沿动作时间的电流累积值,md1为第一个死区时间的电流累积值,mi为第一非零矢量沿动作时间的电流累积值,md2为第二个死区时间的电流累积值,mj为第二非零矢量沿动作时间的电流累积值,md3为第三个死区时间的电流累积值,mo*为第二零矢量沿动作时间的电流累积值,ts为控制周期时间,td为单个死区时间,id1为第一个死区矢量,id2为第二个死区矢量,id3为第三个死区矢量,,,,s0为零矢量电流斜率,s1为第一个非零矢量的电流斜率,s2为第二个非零矢量的电流斜率,sd1为第一个死区的电流斜率,sd2为第二个死区的电流斜率,sd3为第三个死区的电流斜率,t1为第一个非零矢量的动作时间,t2为第二个非零矢量的动作时间;
38、根据最小电流纹波原理,令(irip)2等于0,得到第一零矢量的动作时间tx如下式:
39、
40、然后根据下式计算第二零矢量的动作时间tx*:
41、tx*=tz-tx。
42、可选的,所述采用当前扇区的四段动作时间对死区时间进行补偿,以生成逆变器的脉冲控制信号,包括:
43、采用计算得到的当前扇区的第一零矢量动作时间、第一个非零矢量动作时间、第二个非零矢量动作时间和第二零矢量动作时间更新三个死区时间的初始值,生成脉冲控制信号控制逆变器的各开关状态。
44、根据本发明的第二方面,提供一种带死区时间补偿的永磁同步电机四段无差拍控制系统,包括:
45、扇区选择及分段模块,用于根据获取的电机三相电压矢量选择对应的扇区;还用于将当前扇区的控制周期分为四段并进行排序,其中第一段与第四段采用零矢量,第二段和第三段采用当前扇区的两个非零矢量;相邻段之间具有死区;
46、死区矢量获取模块,用于根据死区效应判断电机逆变器中出现死区的桥臂,还用于根据所述桥臂的电流流向得到死区矢量;
47、信号生成模块,用于基于无差拍原理计算当前扇区控制周期内的零矢量总动作时间和两个非零矢量动作时间;还用于基于最小脉动理论、根据电流矢量和死区矢量计算零矢量总动作时间中第一段零矢量动作时间与第四段零矢量动作时间;还用于采用当前扇区的各段动作时间对死区时间进行补偿,以生成逆变器的脉冲控制信号。
48、根据本发明的第三方面,提供了一种电子设备,包括存储器、处理器,所述处理器用于执行存储器中存储的计算机管理类程序时实现前述带死区时间补偿的永磁同步电机四段无差拍控制方法的步骤。
49、根据本发明的第四方面,提供了一种计算机可读存储介质,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现前述带死区时间补偿的永磁同步电机四段无差拍控制方法的步骤。
50、本发明提供的一种带死区时间补偿的永磁同步电机四段无差拍控制方法、系统、电子设备及存储介质,与传统的无差拍控制方法相比,由于死区时间矢量判断的死区时间补偿部分,使其具有低总谐波失真的优点,并且由于所提出的方法的四段结构,其具有开关频率低的优点。本发明的方案在稳态性能方面具有明显的优势且耗费算力相对较小。
- 还没有人留言评论。精彩留言会获得点赞!