基于水波优化算法的PV并网逆变器控制方法
本发明涉及电力电子,更具体地,涉及一种基于水波优化算法的pv并网逆变器控制方法。
背景技术:
1、随着传统能源的日益枯竭,清洁可持续的新能源走上世界舞台。我国积极响应“双碳”战略,追求低排放、低能耗、低污染的新经济发展。太阳能作为清洁能源之一,其发电的能量转换过程简单,是直接从光能到电能的转换,因而使用需求庞大,应用场所颇多。太阳能发电形式为直流电,而商用、民用电能形式大多为交流电,将直流电转换为交流电的逆变器市场需求急速增长。对于逆变器来说,控制环节的控制参数紧密影响着其输出波形,波形的好坏展示着输出的电能质量好坏。为了让输出电流并入电网,需要并网电流更好地跟随电网相位、满足并网需求,需严格遵循注入电网电流thd要求。群体智能优化算法具有较好的鲁棒性、灵活性等特点,将其应用于控制环节的参数整定具有显著作用,但有些算法存在易陷入局部最优的缺点。水波优化算法具有强大的全局搜索能力,精度较高,不易陷入局部最优,对于多目标决策问题具有良好的表现。由此,使用合适的算法应用于pv并网逆变器控制环节来保证并网电流满足并网要求,得到高质量输出电能是本领域技术人员关心的问题。
技术实现思路
1、为解决pv并网逆变器控制参数整定困难的问题,针对并网需求,本发明提供了一种基于水波优化算法的pv并网逆变器控制方法,涉及电力电子技术领域。其目的在于通过引进水波优化算法对pv并网逆变器控制部分进行参数整定,由于pv并网系统具有高功率因数、静态功率误差小、并网电流畸变率低的需求,采用水波优化算法对该pv系统控制部分的pid控制器进行参数整定和寻优的方式,与现有技术相比较,充分利用了算法的全局搜索能力、收敛速度和寻优精度。再将水波优化算法应用到pq双闭环控制系统中进行逆变器控制环节的控制参数整定,提出一种水波优化算法的pq双闭环pid控制参数整定方法,最后将其运用到pv并网三相逆变器参数整定模型上,抑制了并网电流谐波,保证了电能的高质量输出,这对pv并网三相逆变器控制参数整定问题具有重大意义。
2、技术方案包括以下步骤:
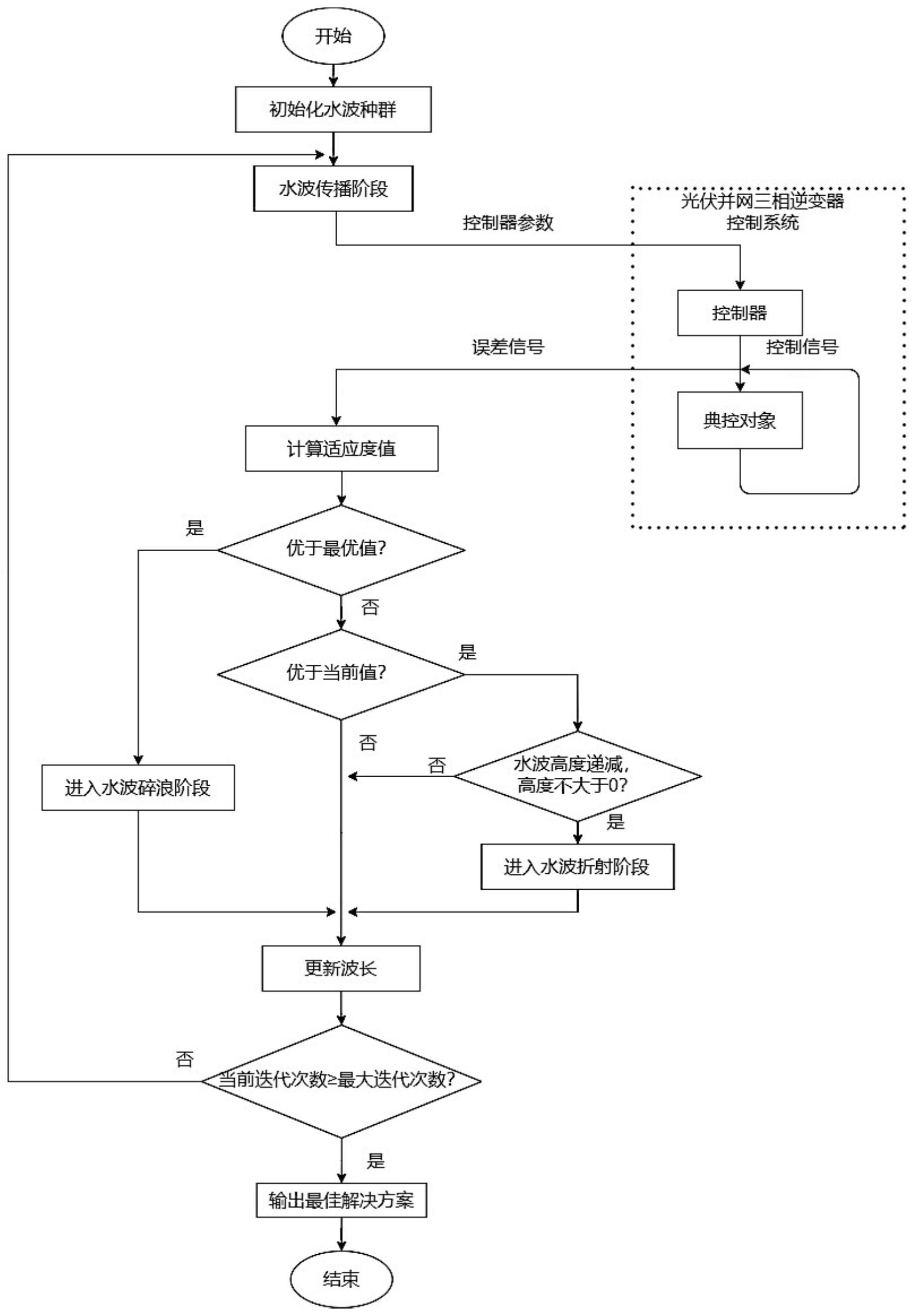
3、s1:初始化水波种群,随机生成n个水波的初始位置设置问题求解维数d和最大迭代次数m;
4、s2:设计水波优化算法的最佳水波位置和适应度值的计算方法,利用水波优化算法的三种形式对水波位置和波长进行更新;
5、s3:建立pv并网三相逆变器控制结构模型,所述模型中逆变器控制结构选择功率-电流双闭环控制结构,该部分均采用基于pi控制的双闭环控制结构;
6、s4:根据s2求得的最优解,将其传递给pv并网三相逆变器整定模型。
7、优选地,所述s2具体包括:
8、s21:由初始位置确定最优水波位置和最优适应度值fb;
9、s22:每一次迭代中每个水波根据当前适应度值确定搜索方式,搜索方式包括传播、先传播后碎浪和先传播后折射;
10、s23:通过s22对水波首先进行传播操作,计算水波传播后对应位置的适应度值fnew与最优适应度值fb以及上一组产生的水波最优位置对应的适应度值进行比较,若fnew不优于任何值,则直接更新波长,若fnew优于当前值但不是最优值,则进入水波折射阶段,若fnew为最优值,则进入水波碎浪阶段,用适应度值较好的水波位置替换适应度值较差的水波位置,得到一组较优的水波位置记录当前最优解;
11、s24:判断是否满足终止条件,若算法迭代次数达到最大迭代次数m,则算法结束,输出当前最优解,否则转到s22继续进行迭代。
12、优选地,所述s22和s23中水波传播的数学表达式为:
13、将每一个水波想象成一个独立的个体,那么水波将拥有3个属性,位置x、波长以及波高h,在每一次迭代过程中,每个水波都会通过传播的形式来对空间进行搜索同时水波的高度h会减少1,水波位置更新公式为:
14、
15、式中,为原始水波的位置,为更新后水波的新位置,rand(-1,1)为(-1,1)的均匀分布随机数,ub、lb分别为搜索空间的上界和下界,λ为该水波的波长;
16、波长的值随着迭代而进行变化,波长更新公式为:
17、
18、式中,α为波长的衰减系数,ξ为一个正整数以保证分母不为0,fmax、fmin分别为适应度函数值的最大值和最小值;
19、每次传播后,若当前的水波优于传播前的水波,则传播大该位置,否则波浪的高度h会减小1,波浪高度更新公式为:
20、
21、式中,分别为水波传播前后的适应度值。
22、优选地,所述s22和s23中水波折射的数学表达式为:
23、在一个水波进行传播之后,该水波有可能进行折射。每次传播,水波的高度h会减少1,当h减少到0时,该水波将发生折射,同时其高度和波长也会改变,折射运算公式为:
24、
25、式中,为当前位置找到的最优解,n(μ,σ)为以当前水波和最优水波中点为均值、当前水波和最优水波距离为方差的高斯正态分布;
26、在折射后水波的高度将会重新初始化为最大高度h=hmax,折射后使用公式重新计算水波波长λ。
27、优选地,所述s22和s23中水波碎浪的数学表达式为:
28、在水波进行传播之后,到达了一个优于当前最优水波的位置,则该水波将会进行碎浪,并将当前最优水波传播到碎浪产生的位置,如果碎浪得到的结果优于当前最优水波,则改变当前最优水波到碎浪的位置,碎浪位置的产生公式为:
29、
30、式中,β为破碎波系数,是一个常数;k为一个随机数,每次碎浪将会随机选择k个维度来进行改变。
31、优选地,所述pi控制由比例调节和积分调节两部分组合而成,比例调节根据偏差的大小成比例的调节输出,积分调节根据偏差进行积分累计来调节输出,直至消除稳态误差,pi控制器的输出关系表达式为:
32、u(t)=kpe(t)+ki∫e(t)dt
33、pi控制器的传递函数表达式为:
34、
35、上式中,偏差信号e(t)为pi控制器的输入量,u(t)为pi控制器的输出量,kp和ki为pi控制器的比例调节参数和积分调节参数。
36、优选地,所述s3中为解决多目标决策,采用均匀加权法;
37、当逆变器采用pi控制时,将三相abc静止坐标系下的交流量进行park变换到两相dq同步旋转坐标系下,此时两相dq静止坐标系下控制量为直流,分别选取双闭环中功率环和电流环对应电流的积分绝对误差iae,加权之后作为逆变器控制参数整定的目标函数,iae的表达式为:
38、
39、式中,t为系统时间,|e(t)|为误差绝对值;
40、总谐波畸变率表达式为:
41、
42、式中,vhn为n次谐波,vho1为基波有效值,thd为除基波外所有谐波有效值的平方和开方后除以基波有效值,总谐波畸变率thd越小交流量谐波含量越低,总谐波失真越小。
43、优选地,所述pi控制中对于pi控制器参数整定,分别选取双闭环中功率环和电流环对应电流的iae,加权之后作为参考整定的目标函数,则目标函数公式为:
44、
45、上式中,a、b为权重系数,均为常系数,并满足a+b=1,em(t)、en(t)分别为功率外环和电流内环输入pi控制器的误差。
46、本发明建立pv并网三相逆变器控制结构模型,所述模型中逆变器控制结构选择pq双闭环控制结构,该部分均采用基于pi控制的控制结构,将水波优化算法应用于该控制结构。
47、通过本发明引进一种基于水波优化算法对pv并网三相逆变器控制环节进行控制参数整定,预设参数少,且只需较短时间即可得到符合要求的结果,算法能够快速进行寻优,寻优结果能够保证并网电流满足总谐波畸变率低于5%的并网要求,保证了电能的高质量输出,稳定效果好。并网有功功率接近pv阵列输出功率500kw,系统从开机到稳定经过短暂的暂态后能够快速调整,使得功率因数接近为1,并网效果良好。这对pv并网三相逆变器控制参数整定问题具有重大意义。
- 还没有人留言评论。精彩留言会获得点赞!