磁偏角异常检测方法、装置、设备和可读存储介质与流程
本技术涉及伺服领域,更具体地说,涉及磁偏角异常检测方法、装置、设备和可读存储介质。
背景技术:
1、工业机器人控制器、各种数控设备和自动化产线的根本在于各种伺服电机的实时运动控制,大多由伺服驱动器和伺服电机等设备单元构成。目前最流行最先进的伺服驱动算法是通过磁场定向控制(field-orientedcontrol,foc)的矢量控制算法实现对交流永磁同步电机输出转矩的线性控制,从而进一步实现电机速度和位置的精确控制。
2、foc方法是通过控制线圈(定子或动子)的合成电流矢量的角度和幅值来控制电机的输出转矩。合成矢量的角度取决于转子和定子的相对位置,因此在伺服驱动器和伺服电机都会安装编码器间接获得所需的位置信息,而编码器有磁偏角会影响伺服的运动控制。
3、磁偏角是固定的,出厂都会需要一次整定来确定磁偏角。但是如果由于安装或者运行过程中产生冲击会致编码器偏转,相对值编码器的零点是每次上电时的当前位置,因此每次运行前都需要确保编码器磁偏角正常,没有发生偏转。磁偏角的准确度直接影响到foc伺服控制的效率,还有可能导致伺服失控。因此,伺服电机或直线电机的磁偏角的运动控制前检测是否正常尤为重要。
4、目前较常用的测量磁偏角的方法为使用亥姆霍兹线圈,分别测量磁通量在x、y、z三个方向的分量,利用各分量与磁偏角的关系式求得磁偏角,这种方法操作复杂,难度较高且效率低下。
5、基于上述情况,本技术提出一种较为简单的磁偏角异常检测方案,以在伺服电机或直线电机的磁偏角的运动控制前检测磁偏角是否异常。
技术实现思路
1、有鉴于此,本技术提供了一种磁偏角异常检测方法、装置、设备和可读存储介质,根据位置偏差分析值实现电机编码器磁偏角检测,进行完整、快速的伺服运动前安全检测。
2、一种磁偏角异常检测方法,包括:
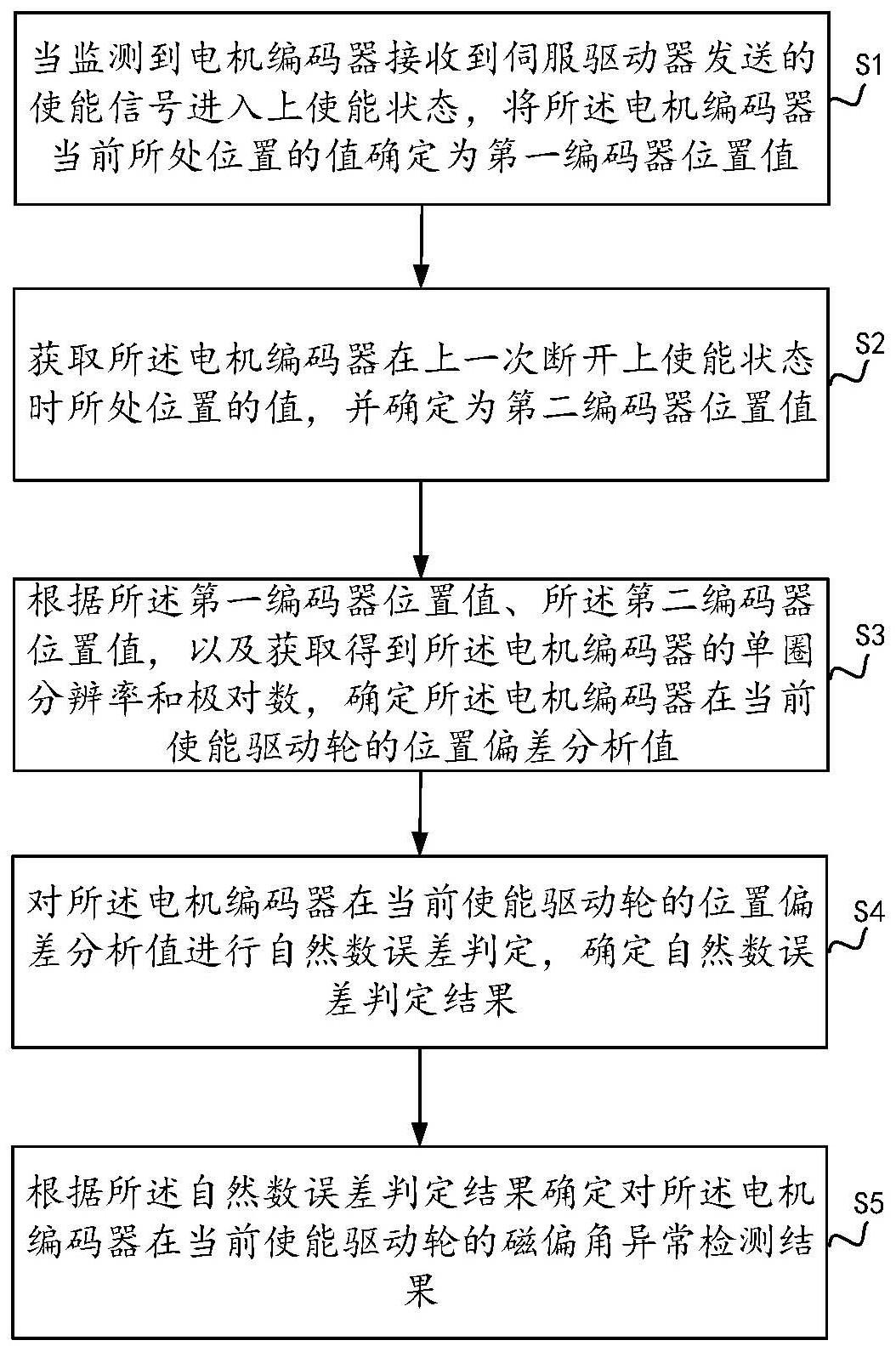
3、当监测到电机编码器接收到伺服驱动器发送的使能信号进入上使能状态,将所述电机编码器当前所处位置的值确定为第一编码器位置值;
4、获取所述电机编码器在上一次断开上使能状态时所处位置的值,并确定为第二编码器位置值;
5、根据所述第一编码器位置值、所述第二编码器位置值,以及获取得到所述电机编码器的单圈分辨率和极对数,确定所述电机编码器在当前使能驱动轮的位置偏差分析值;
6、对所述电机编码器在当前使能驱动轮的位置偏差分析值进行自然数误差判定,确定自然数误差判定结果,所述自然数误差判定为判定所述位置偏差分析值是否为自然数或与最接近的自然数的差值处于允许误差范围内;
7、根据所述自然数误差判定结果确定对所述电机编码器在当前使能驱动轮的磁偏角异常检测结果。
8、可选的,根据所述第一编码器位置值、所述第二编码器位置值,以及获取得到所述电机编码器的单圈分辨率和极对数,确定所述电机编码器在当前使能驱动轮的位置偏差分析值,包括:
9、将所述第一编码器位置值与所述第二编码器位置值之间的差值确定为所述电机编码器在当前使能驱动轮的位置角偏差值;
10、基于所述位置角偏差值,以及获取得到所述电机编码器的单圈分辨率以及极对数,计算得到所述电机编码器在当前使能驱动轮的位置偏差分析值。
11、可选的,计算得到所述电机编码器在当前使能驱动轮的位置偏差分析值的计算公式为:
12、;
13、其中,为电机编码器在当前使能驱动轮的位置偏差分析值,为电机编码器在当前使能驱动轮的位置角偏差值, m和 n分别为电机编码器的单圈分辨率以及极对数。
14、可选的,根据所述自然数误差判定结果确定对所述电机编码器在当前使能驱动轮的磁偏角异常检测结果,包括:
15、若所述电机编码器在当前使能驱动轮的位置偏差分析值为自然数或与最接近的自然数的差值处于允许误差范围内,则确定所述电机编码器在当前使能驱动轮未发生磁偏角异常;
16、若所述电机编码器在当前使能驱动轮的位置偏差分析值不为自然数且与最接近的自然数的差值超过允许误差范围内,则确定所述电机编码器在当前使能驱动轮发生磁偏角异常。
17、可选的,还包括:
18、在确定所述电机编码器在当前使能驱动轮发生磁偏角异常的情况下,停止伺服运动,并通过所述伺服驱动器的外观数字显示面板显示报警代码。
19、可选的,还包括:
20、通过自整定纠正磁偏角,并在纠正完成后复位消除所述外观数字显示面板显示的所述报警代码。
21、可选的,还包括:
22、在所述电机编码器第一次接收到所述伺服驱动器发送的使能信号进入上使能状态的情况下,将所述伺服驱动器上电时所述电机编码器所处位置的值确定为所述第二编码器位置值。
23、一种磁偏角异常检测装置,包括:
24、第一位置单元,用于当监测到电机编码器接收到伺服驱动器发送的使能信号进入上使能状态,将所述电机编码器当前所处位置的值确定为第一编码器位置值;
25、第二位置单元,用于获取所述电机编码器在上一次断开上使能状态时所处位置的值,并确定为第二编码器位置值;
26、偏差分析单元,用于根据所述第一编码器位置值、所述第二编码器位置值,以及获取得到所述电机编码器的单圈分辨率和极对数,确定所述电机编码器在当前使能驱动轮的位置偏差分析值;
27、自然数判定单元,用于对所述电机编码器在当前使能驱动轮的位置偏差分析值进行自然数误差判定,确定自然数误差判定结果,所述自然数误差判定为判定所述位置偏差分析值是否为自然数或与最接近的自然数的差值处于允许误差范围内;
28、结果确定单元,用于根据所述自然数误差判定结果确定对所述电机编码器在当前使能驱动轮的磁偏角异常检测结果。
29、一种磁偏角异常检测设备,包括存储器和处理器;
30、所述存储器,用于存储程序;
31、所述处理器,用于执行所述程序,实现如上述任一项所述的磁偏角异常检测方法的各个步骤。
32、一种可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现如上述的任一项所述的磁偏角异常检测方法的各个步骤。
33、从上述的技术方案可以看出,本技术实施例提供的一种磁偏角异常检测方法、装置、设备和可读存储介质,当监测到电机编码器接收到伺服驱动器发送的使能信号进入上使能状态,通过将所述电机编码器当前所处位置的值确定为第一编码器位置值,同时获取所述电机编码器在上一次断开上使能状态时所处位置的值,并确定为第二编码器位置值。根据所述第一编码器位置值、所述第二编码器位置值,以及获取得到所述电机编码器的单圈分辨率和极对数,确定所述电机编码器在当前使能驱动轮的位置偏差分析值。之后,通过对所述电机编码器在当前使能驱动轮的位置偏差分析值进行自然数误差判定,确定自然数误差判定结果,所述自然数误差判定为判定所述位置偏差分析值是否为自然数或与最接近的自然数的差值处于允许误差范围内。最后根据所述自然数误差判定结果确定对所述电机编码器在当前使能驱动轮的磁偏角异常检测结果。
34、本技术确定电机编码器上使能开始以及上一次上使能结束时候的所处位置的值,并通过二者的差值确定所述电机编码器在当前使能驱动轮的位置偏差分析值,在电机编码器磁偏角正常情况下,位置偏差分析值会非常等于或非常接近自然数,因此可以通过自然数误差判定后确定对电机编码器磁偏角的异常检测结果。本技术能够进行简单高效地判断,提高了磁偏角检测方法的灵活性、完整性、严密性和诊断效率,保障了伺服运动控制前的安全性。同时本技术在每一次伺服驱动器发送的使能信号使电机编码器进入上使能状态前都可以对磁偏角进行一次检测,可实现伺服运行过程中持续性的对伺服驱动器和伺服电机进行完整、快速的磁偏角异常检测。
- 还没有人留言评论。精彩留言会获得点赞!