弱电网下抑制直驱风电场次同步振荡的控制方法及装置
本发明涉及直驱风机。
背景技术:
1、随着世界范围内的能源消耗与日俱增,推动光伏、风电等分布式发电并网,构建多元化、清洁化的电网供电体系已成为首要任务。目前电力系统以集中供电为主,如果出现意外,将导致大规模的电力供应中断。目前,风力发电发展迅速,然而大规模风电通过远距离传输接入交流电网,会降低受端电网的连接强度,增加系统失稳的风险,近几年,我国发生多起直驱风电场接入弱交流电网发生次同步振荡问题,需采取相应的技术措施来防范次同步振荡的风险。
2、自抗扰控制(automatic disturbance rejection control,adrc)是在pid控制的基础上改进而来的一种控制方法,其核心思想是pi误差反馈,在adrc的设计上,不需要考虑控制系统的数学模型。在此基础上,又提出一种线性化的自抗扰控制技术——线性自抗扰技术(linear active disturbance rejection control,ladrc),使控制器的参数调整得到了很大程度的简化。采用ladrc控制时,参数的选择较为容易,它能保证控制器的稳定运行。与现有的许多其他控制方式相比,该方法易于实现,具有较好的实用价值。
3、然而,研究表明,ladrc控制器虽然能有效抑制直驱风电场接入弱交流电网产生此同步振荡,但是现有的ladrc控制器稳定性较弱,采用该ladrc控制器进行直驱风电场次同步振荡抑制时,系统整体的抗干扰能力较差。
4、因此,如何提供一种抗干扰能力强的弱电网下抑制直驱风电场次同步振荡的控制方法及装置,成为本领域亟待解决的技术问题。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种弱电网下抑制直驱风电场次同步振荡的控制方法及装置,该方法改进了自抗扰控制器并应用于网侧换流器,在传统的ladrc基础上进行改进,使系统整体具有更好的动态响应性能和抗干扰能力,且能有效抑制次同步振荡的产生。
2、基于同一发明构思,本发明具有四个独立的技术方案:
3、1、一种弱电网下抑制直驱风电场次同步振荡的控制方法,包括:
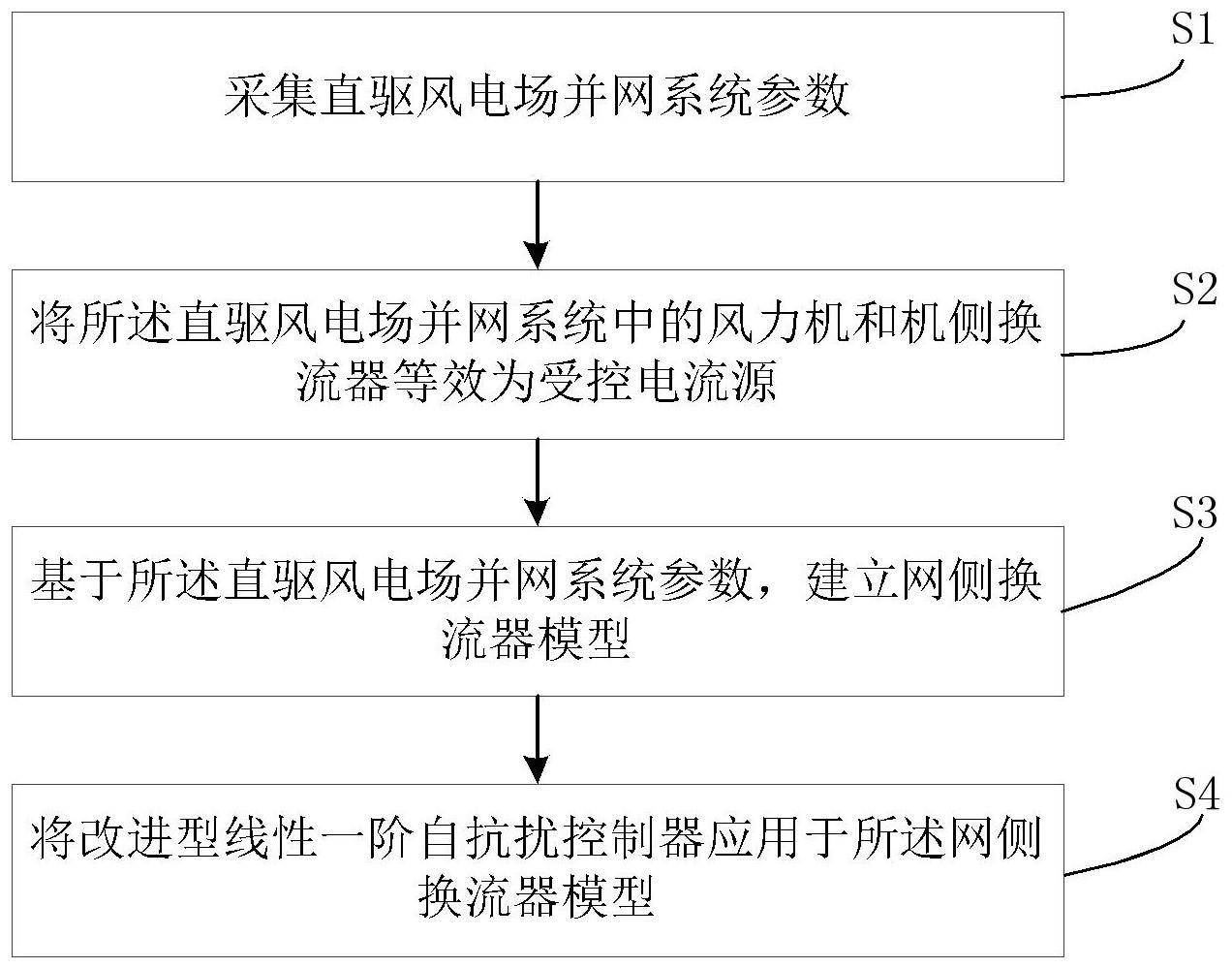
4、采集直驱风电场并网系统参数;
5、将所述直驱风电场并网系统中的风力机和机侧换流器等效为受控电流源;
6、基于所述直驱风电场并网系统参数,建立网侧换流器模型;
7、将改进型线性一阶自抗扰控制器应用于所述网侧换流器模型;
8、其中,所述改进型线性一阶自抗扰控制器表示如下:
9、;
10、其中,z1、z2为扰动估计值,、为扰动估计值的微分量,b0为误差因子,β1、β2为可调参数,u为扰动补偿量,为误差反馈率,kp为自抗扰控制器带宽,y为系统输出,为忽略微分项的不完全误差,,e1为误差信号,为系统输出的微分量,v为给定信号。
11、进一步地,所述直驱风电场并网系统包括所述风力机、所述机侧换流器、所述网侧换流器以及弱交流电网。
12、进一步地,所述网侧换流器模型表示如下:
13、;
14、其中,ω为系统同步角速度,l为交流侧的滤波电感,rg为网侧换流器交流侧的等效电阻,ucd、ucq分别为网侧换流器输出电压的d轴和q轴分量,igd、igq分别为网侧换流器交流侧电流的d轴和q轴分量,ugd、ugq分别为风机并网点电网电压的d轴和q轴分量,ig为风机并网点电流,c为网侧换流器直流侧电容,idc为所述受控电流源提供的流经网侧换流器直流侧电容的电流,udc为网侧换流器直流侧电容的电压值。
15、进一步地,所述改进型线性一阶自抗扰控制器通过如下步骤得到:
16、对线性扩张状态观测器进行改进,改进后的线性扩张状态观测器表示如下:
17、;
18、;
19、;
20、其中,为误差信号的微分量,为状态变量;
21、基于所述改进后的线性扩张状态观测器估计系统误差,并通过线性状态误差反馈控制器补偿得到补偿后输出,表示如下:
22、;
23、其中,e为理想误差;
24、将所述理想误差中的微分项忽略,得到不完全误差,用所述不完全误差代替所述补偿后输出中的所述理想误差,得到改进型线性一阶自抗扰控制器。
25、进一步地,所述理想误差表示如下:
26、。
27、进一步地,将改进型线性一阶自抗扰控制器应用于所述网侧换流器模型时,采用电压外环和电流内环双闭环控制,其中,d轴电流内环控制方程表示如下:
28、;
29、其中,为d轴电流参考值,、为观测器状态变量,、为观测器状态变量的微分量,为误差因子,为忽略观测器的估计误差,为电流内环控制器的扰动补偿环节;
30、电压外环控制方程表示如下:
31、;
32、其中,为直流侧电容电压参考值,、为观测器状态变量,、为观测器状态变量的微分量,为误差因子,为忽略观测器的估计误差,为电压外环控制器的扰动补偿环节。
33、2、一种弱电网下抑制直驱风电场次同步振荡的控制装置,包括:
34、参数采集模块,用于采集直驱风电场并网系统参数;
35、等效电源模块,用于将所述直驱风电场并网系统中的风力机和机侧换流器等效为受控电流源;
36、网侧环流模型建立模块,用于基于所述直驱风电场并网系统参数,建立网侧换流器模型;
37、控制模块,用于将改进型线性一阶自抗扰控制器应用于所述网侧换流器模型;
38、所述控制模块中,所述改进型线性一阶自抗扰控制器表示如下:
39、;
40、其中,z1、z2为扰动估计值,、为扰动估计值的微分量,b0为误差因子,β1、β2为可调参数,u为扰动补偿量,为误差反馈率,kp为自抗扰控制器带宽,y为系统输出,为忽略微分项的不完全误差,,e1为误差信号,为系统输出的微分量,v为给定信号。
41、3、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述方法。
42、4、一种电子设备,包括处理器和存储装置,所述存储装置中存有多条指令,所述处理器用于读取所述存储装置中的多条指令并执行上述方法。
43、本发明提供的弱电网下抑制直驱风电场次同步振荡的控制方法及装置,至少包括如下有益效果:
44、(1)该方法在传统的ladrc基础上进行改进,改进了自抗扰控制器并应用于网侧换流器,使系统整体具有更好的动态响应性能和抗干扰能力,且能有效抑制次同步振荡的产生;
45、(2)利用受控电流源代替不参与次同步振荡的风力机和机侧换流器部分,使得方法更加简洁方便;
46、(3)相较于传统ladrc,扰动量对系统输出影响减少,在中低频段下,改进型ladrc扰动的增益始终小于传统ladrc,系统带宽增加,抗干扰能力强;与pi控制器对比,能明显抑制直驱风电场接入弱交流电网产生次同步振荡,且在不同工况下,改进型ladrc都能有效抑制次同步振荡。
- 还没有人留言评论。精彩留言会获得点赞!