一种基于超局部模型的表贴式永磁同步电机直接速度预测控制方法及系统
本发明涉及电机驱动控制,具体而言,尤其涉及一种基于超局部模型的表贴式永磁同步电机直接速度预测控制方法及系统。
背景技术:
1、永磁同步电机(permanent magnet synchronous motor,pmsm)因其具有可靠性高、结构简单、体积小、调速范围广等诸多优点被应用于航空航天、车床、船舶等领域。模型预测直接速度控制(model predict direct speed control,mpdsc)可以控制多目标参数,将电流和转速同时预测,并且具有较好的动态响应。
2、模型预测直接速度控制依赖电机参数,然而永磁同步电机驱动系统运行过程中随着环境温度变化、线圈绕组磁饱和以及永磁体的磁通密度变化等因素都会引起电机定子电感、永磁体磁链、转动惯量等参数发生变化。因此,永磁同步电机参数摄动对模型预测直接速度控制具有较大影响。
技术实现思路
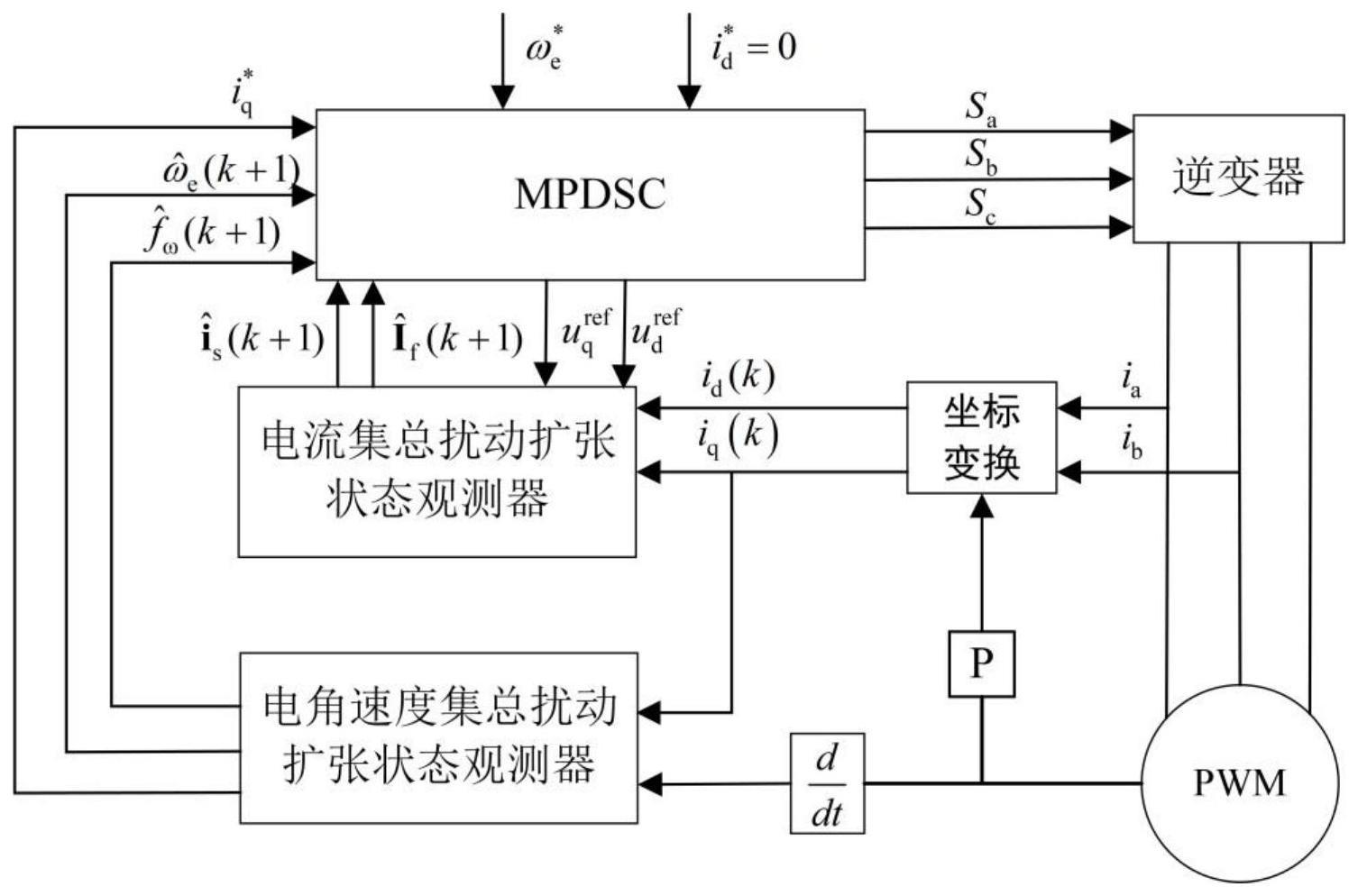
1、根据上述提出的技术问题,提供一种基于超局部模型的表贴式永磁同步电机直接速度预测控制方法。本发明方法在电机数学模型基础上建立电流和转速的超局部模型,利用扩张状态观测器对电流和转速的集总扰动进行观测。结合一步延时补偿和无差拍的控制方法,利用观测器输出k+1时刻的电流观测值、转速观测值、电流集总扰动观测值和转速集总扰动观测值。利用直接速度预测控制的代价函数选择最小预测偏差值对应的最优电压矢量和开关状态,经逆变器实现对永磁同步电机的控制。
2、本发明采用的技术手段如下:
3、一种基于超局部模型的表贴式永磁同步电机直接速度预测控制方法,包括:
4、s1、建立表贴式永磁同步电机的超局部数学模型;
5、s2、建立电流扩张状态观测器;
6、s3、建立转速扩张状态观测器;
7、s4、将步骤s2建立的电流扩张状态观测器的输出值和步骤s3建立转速的扩张状态观测器的输出值输入至直接速度预测模型,通过代价函数获得最小预测偏差errmin对应的最优电压矢量usref和sa、sb、sc开关状态,经逆变器实现对永磁同步电机的控制。
8、进一步地,所述步骤s1具体包括:
9、s11、建立表贴式永磁同步电机在dq轴旋转坐标系下的数学模型,如下:
10、
11、
12、
13、
14、其中,r表示电机电阻,l表示d、q轴电感,ψ表示永磁体磁链,ωe表示电角速度,id、iq分别表示d、q轴电流,ud、uq分别表示d、q轴电压,te表示电磁转矩,tl表示负载转矩,p表示电机极对数,j表示电机转动惯量,b表示阻尼系数;
15、s12、根据步骤s11建立的模型,建立超局部模型,如下:
16、
17、
18、
19、其中,bc表示待设计的电压系数,bω表示待设计的电流系数;ifd、ifq、fω分别表示集总扰动,包括永磁同步电机的已建模部分和扰动部分;
20、s13、利用欧拉法对步骤s12建立的超局部模型进行离散化,得到电流预测方程和转速预测方程如下:
21、
22、
23、
24、其中,ts是电流采样时间,tspeed是转速采样时间;
25、s14、考虑硬件及数字控制方式的影响,对转速预测方程进行一拍延时补偿,如下:
26、
27、
28、
29、s15、利用步骤s13中得到的转速预测方程,得到q轴参考电流,如下:
30、
31、s16、为了使转速能更好跟踪给定转速,令ωe(k+1)=ωe*,得到q轴参考电流,如下:
32、
33、进一步地,所述步骤s2中,所述电流扩张状态观测器使用d、q轴电流id、iq和d、q轴电压ud、uq作为输入,输出d、q轴电流估计值和电流集总扰动观测值
34、进一步地,所述步骤s2具体包括:
35、s21、建立电流集总扰动的扩张状态观测器数学模型,如下:
36、
37、
38、
39、其中,ec表示表示电流观测误差,ec=[ed,eq]t,ed表示d轴电流观测误差,eq表示q轴电流观测误差;表示电流观测值,表示d轴电流观测值,表示q轴电流观测值;表示电流扰动观测值,表示d轴电流扰动观测值,表示q轴电流扰动观测值;us表示输入电压,us=[ud,uq]t;
40、s22、根据步骤s21建立的电流集总扰动的扩张状态观测器数学模型,得到电流实际扰动与估测扰动的传递函数,如下:
41、
42、其中,s表示传递函数中的自变量;β1iβ2i分别表示电流集总扰动的扩张状态观测器的增益系数。
43、s23、二阶低通滤波器的传递函数,如下:
44、
45、其中,ξ表示阻尼系数,设置为0.707,ωf表示带宽;
46、s24、按照步骤s23中的二阶低通滤波器的传递函数对电流实际扰动与估测扰动的传递函数进行参数整定,得到β1=2ωfξ,β2=ωf2;
47、s25、按照步骤s15中得到的q轴参考电流采用前向欧拉离散法得到离散化状态空间方程,如下:
48、
49、
50、
51、s26、为了弥补数字控制系统中的一拍延迟问题,将k+1时刻得到的电流观测值和电流集总扰动观测值代替is(k+1)和如下:
52、
53、
54、进一步地,所述步骤s3中,所述转速扩张状态观测器使用q轴电流、转速参考值ωe*和转速实际值ωe作为输入,输出q轴电流参考值iq*、转速观测值和转速集总扰动观测值
55、进一步地,所述步骤s3具体包括:
56、s31、建立转速集总扰动项的扩张状态观测器数学模型,如下:
57、
58、
59、
60、其中,β1ω,β2ω是转速集总扰动的扩张状态观测器的增益系数;
61、s32、根据步骤s31建立的转速集总扰动项的扩张状态观测器数学模型,得到转速实际扰动与观测扰动的传递函数,如下:
62、
63、s33、将转速集总扰动观测器中观测到的和替代ωe(k)和弥补一拍延迟,得到经过补偿后的q轴参考电流,如下:
64、
65、较现有技术相比,本发明具有以下优点:
66、1、本发明提供的基于超局部模型的表贴式永磁同步电机直接速度预测控制方法,通过建立速度和电流的超局部模型,对速度和电流同时进行预测控制的直接速度预测控制动态响应能力更好。
67、2、本发明提供的基于超局部模型的表贴式永磁同步电机直接速度预测控制方法,不使用任何电机参数的超局部模型代替永磁同步电机数学模型,增强了系统的鲁棒性,延续了无模型预测控制方法的优势。
68、基于上述理由本发明可在电机驱动控制等领域广泛推广。
- 还没有人留言评论。精彩留言会获得点赞!