一种串联PID励磁控制的动态静差补偿方法与流程
本发明涉及发电机自动控制,具体涉及一种串联pid励磁控制的动态静差补偿方法。
背景技术:
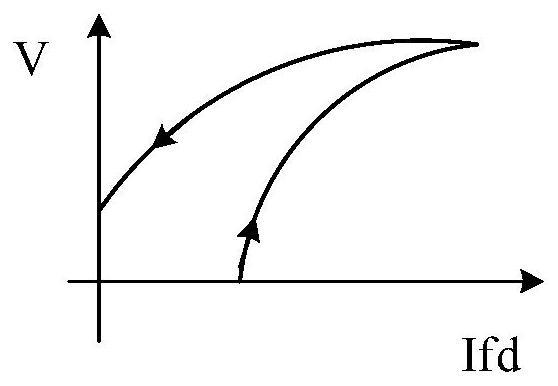
1、励磁系统通过相控整流技术调节发电机转子绕组的励磁电流来改变磁场强度,进而改变发电机机端电压。受磁场磁滞回线特性影响,在磁场不饱和的阶段,励磁电流的变化量与发电机机端电压的变化量呈线性关系,在磁场趋于饱和时,相对于磁场不饱和阶段,提高相同幅值的电压,励磁电流需要增大更大的幅值。相关试验结果如图1所示:单向增磁,同时记录发电机机端电压和励磁电流,直到机端电压达到空载时允许设置的最大值,然后单向减磁直到励磁电流为0。可以看到增磁的初始阶段,励磁电流与电压基本呈线性关系,但励磁电流增大到一定幅值后进入非线性阶段,相比线性阶段,提高相同幅值的电压,励磁电流需要的变化量更大。减磁过程与增磁过程类似,但两条曲线并不重合。
2、串联pid是一种常见的有差调节方式,如图2中所示,为串联pid调节的传递函数模型:
3、vamax=1.35vanode/(0.9vf0)cosαmin
4、vamin=1.35vanode/(0.9vf0)cosαmax
5、其中vanode/是阳极电压,vf0是空载额定励磁电压,1.35vanode/(0.9vf0)是一个可设置参数,缺省值为9,是励磁系统模型中的功率柜放大倍数;α是控制角,缺省值αmax=120°,αmin=15°
6、一般t11<t12,(1+st11)/(1+st12)作为积分环节、t13>t14,(1+st13)/(1+st14)作为微分环节,k是增益。
7、调节稳定后测量值与给定值并不一致,而是略低于给定值,偏差约1/k,其中k的pid的增益。在励磁系统中应用串联pid会因为这种静差在通道切换时产生微小的扰动。
8、励磁系统通常配置了两个控制通道,一个在线控制,一个热备;备用控制通道的给定值一般跟踪自身的测量值,而不是在线控制通道的给定值;因为首先两个控制通道运行方式可能不同,其次限制保护动作之后,测量值受限制保护控制,暂时与给定值无关;例如欠励限制动作时,欠励限制得到的偏差大于电压偏差,在高通门中通过的将是欠励限制的无功功率偏差,而不是电压方式下的电压偏差,此时实际控制对象是无功功率,电压幅值高于电压给定值,在此工况下备用控制通道跟踪电压给定值没有意义。
9、但是使用串联pid这种有差调节时进行通道切换或者运行方式切换会产生一个小幅下阶跃:此前的备用通道给定值为测量值,转为在线控制后因为串联pid控制的原因,稳定后测量值略低于给定值,即备用通道转为在线控制后的测量值略低于此通道作为备用通道时的测量值。例如控制通道1作为在线控制通道时,在电压方式下给定值为1p.u.(p.u.标幺值),此时pid参数中k=500,而测量值为0.998p.u.,机端电压测量值比给定值低约1/k,这里k是串联pid的增益。此时控制通道2测量值为0.998p.u.,给定值跟踪测量值也是0.998p.u.。在此工况下在线控制通道切换到控制通道2,控制通道2的给定值仍然是0.998p.u.,但是测量值将因为串联pid控制的原因,略低于给定值,机端电压会降低到0.996p.u.。即通道切换会产生一个小幅下阶跃,对于系统而言也是一个小扰动。
10、另外,给定值与测量值之间的偏差也不是确定不变的1/k,在磁场饱和阶段,静差将进一步加大。在励磁电流较大时的电压静差远大于空载额定工况:现场试验中,发电机输出额定有功功率和额定无功功率时电压静差可能达到2/k。
技术实现思路
1、本发明所要解决的技术问题是提供一种串联pid励磁控制的动态静差补偿方法,提高系统的稳定性。
2、为解决上述技术问题,本发明所采用的技术方案是:
3、一种串联pid励磁控制的动态静差补偿方法,包括:
4、电压偏差和限制保护偏差通过高通门和低通门比较后叠加静差补偿k为串联pid控制的励磁系统的增益,kt为静差补偿系数;
5、励磁系统开始输出时,在线控制通道每隔0.5秒检测一次给定值和测量值的偏差,并根据比较结果决定是否对kt进行调整以及调整幅度;
6、所述的静差补偿方法应用于串联pid控制的励磁系统,串联pid控制的励磁系统结构包括在高通门和低通门的电压偏差和限制保护偏差比较后叠加静差补偿,再将得到的偏差值输出至传递函数经过增益调节后进行输出。
7、上述的串联pid控制的励磁系统的高通门输入包括机端电压v与电压运行方式的电压实时值ref的差值δref、最小励磁电流限制偏差、欠励限制偏差以及容性定子过流限制偏差。
8、上述的串联pid控制的励磁系统的低通门输入包括高通门的输出、强励限制偏差、感性定子过流限制偏差以及强励限制偏差。
9、上述的静差补偿系数kt的调整流程为:
10、step1、当动态静差补偿调节延时达到0.5秒时,开启静差补偿系数kt的调整判断;
11、step2、判断励磁系统是否处在已输出状态且不是在恒控制角方式,若是,进入step3;若不是,将kt整定为1;
12、step3、判断电压偏差值δref的值,若-0.0001<δref<0.0001成立,退出调整程序;若不成立,进入step4;
13、step4、判断电压偏差值δref的值,若δref<-0.1或δref>0.1成立,退出调整程序;若不成立,进入step5;
14、step5、判断电压偏差值δref的值,若δref>0成立,则进入step6;若不成立,进入step7;
15、step6:
16、step6.1、kt=kt+0.01;
17、step6.2、判断kt的值,若kt>3成立,强制kt=3并退出调整程序;若不成立,直接退出调整程序;
18、step7:
19、step7.1、kt=kt-0.01;
20、step7.2、判断kt的值,若kt<1成立,强制kt=1并退出调整程序;若不成立,直接退出调整程序。
21、上述的定子过流限制出现时根据无功功率q分为两种:q<0时称为容性定子过流限制,q>0时称为感性定子过流限制。
22、励磁系统限制保护是针对各种状态幅值的限制,要求当前状态幅值不得超过限制保护功能允许的上限或者下限;
23、最小励磁电流限制要求励磁电流不小于限制设置的ifd_min,此限制所得偏差为ifd_min-ifd;ifd为励磁电流;
24、强励限制要求励磁电流不大于限制设置的ifd_max,此限制所得偏差为ifd_max-ifd;
25、定子过流限制要求定子电流不大于限制设置的imax,此限制所得偏差为imax-i;i为定子电流;
26、欠励限制要求无功功率不小于限制设置的qmin,此限制所得偏差为qmin-q;
27、过无功限制要求无功功率不大于限制设置的qmax,此限制所得偏差为qmax-q。
28、上述的串联pid控制的励磁系统包含两个控制通道,一个为在线控制通道,一个为热备用控制通道;
29、热备用控制通道直接使用在线控制通道的静差补偿系数kt,自身不刷新kt。
30、本发明提供的一种串联pid励磁控制的动态静差补偿方法,通过补偿静差使测量值与给定值一致,保证串联pid实现无扰切换,这里的切换包括运行方式切换和控制通道切换。
31、励磁系统有多种运行方式,包括恒机端电压方式、恒励磁电流方式、恒无功功率方式、恒功率因数方式已经试验时使用的恒控制角方式;没有使用静差补偿时,在恒控制角方式以外的运行方式之间切换会产生小幅下阶跃;同理,在线控制权由当前在线通道切换到备用通道也会产生小幅下阶跃。
- 还没有人留言评论。精彩留言会获得点赞!