一种基于智能摇椅的稳压控制方法与流程
本发明涉及电子电路,特别是涉及一种基于智能摇椅的稳压控制方法。
背景技术:
1、目前市面上的摇椅常常是通过pwm控制mos管降压直接作用于电机,在极简成本的需求下通过简单的控制方法让摇椅的电机工作,这样电机可以在需求不精细的情况下完成用户的基本需求。
2、但现有技术中摇椅的直流电机是非线性的电压,在工作时,直流电机输入的电压常为非连续性的电压且控制方法过于简单不成系统,由于直流电机输入的电压为非连续性电压,会导致其产生抖动、运转不畅和发出异响、影响寿命、较大的电源纹波会影响整体电路等情况。
3、其导致原因为:直流电机电压输入不连续时会产生电压真空带,处于这个阶段的电机无电压输入,只能依靠惯性转动,由于摩擦力原因处于减速状态,而在正常电压带有电压输入的情况下电机处于加速状态,这一加一减造成电机工作不平稳且噪音大。
4、因此,有必要进一步改进。
技术实现思路
1、基于此,本发明的目的旨在提供一种基于智能摇椅的稳压控制方法以克服现有技术中的不足之处,通过三路pid分工调节,在互不干扰的情况下能够共同工作衔接调节,只需两路ad检测通过控制系统运算后精确控制一路pwm输出即可让摇椅最大限度的稳定工作,提高系统的稳定性,实时性,这种通过pid调节的控制方法能摇椅平稳的低噪音的工作,提升工作质量和减少噪声污染,极大提高用户体验。
2、按此目的设计的一种基于智能摇椅的稳压控制方法,包括电流检测电路、电压检测电路、pwm输出模块以及pid控制系统,所述控制系统包括第一频率路pid、第二电压路pid和第三电流路pid,所述pwm输出模块控制mos管输出的非连续性电压变成带有纹波的连续性电压,所述第一频率路pid控制电压pwm输出频率,可将纹波降到最低,所述第二电压路pid调节pwm占空比,以达到设置的期望电压,使其可看作小幅波动的恒定电压;当输入电压稳定时通过第三电流路pid调节电压值,使电机电流无限接近设置的期望电流,从而得到恒定电流。
3、所述控制系统还包括初始数据,所述初始数据为所述电流检测电路用于检测电机的电流路ad值,所述电流检测电路所测的电流路ad值经过滤波及其与电流关系式得到电机回路的电流值mcur。
4、所述控制系统还包括整理数据,所述整理数据为所述电压检测电路用于检测电机的电压路ad值,所述电压检测电路所测的电压路ad值经过滤波排序以及通过电压关系式得到电机两端电压值volout和纹波值v_value。
5、所述电压路ad值通过排序法进行排序,得到所述电压路ad值的最大值、最小值和中间值,所述电流路ad值的中间值套入所述电流路ad值与电流关系式得到电流值mcur;所述电压路ad值的中间值套入所述电压路ad值与电压关系式得到电压值volout;所述最大值和所述最小值的差套入公式可得所述纹波值v_value。
6、所述控制系统还包括期望数据,所述期望数据包括期望电压值v_pid.target、期望电流值i_pid.target和期望纹波值p_pid.target;根据检测到的所述纹波值v_value,所述第一频率路pid算法调节pwm的频率,使所述纹波值v_value无限向所述期望纹波值p_pid.target靠近;得到所述电压值volout通过所述第二电压路pid算法调节pwm占空比,使所述电压值volout无限接近于所述期望电压值v_pid.target;根据检测到的所述电流值mcur通过所述第三路电流pid算法调节期望电压值v_pid.target,使所述电流值mcur其无限接近于所述期望电流值i_pid.target。
7、所述第一频率路pid的公式为:
8、p_pid.uk=p_pid.up*p_pid.kp+p_pid.ui*p_pid.ki+p_pid.ud*p_pid.kd;
9、比例系数p_pid.up=0.1;积分系数p_pid.ui=0.001;微分系数p_pid.ud=0.02;
10、误差单位p_pid.kp=p_pid.target-v_value;
11、积分项单位p_pid.ki=t(p_pid.ek),其中p_pid.ek为时间t区间每次误差值。
12、所述第二电压路pid的公式为:
13、v_pid.uk=v_pid.up*v_pid.kp+v_pid.ui*v_pid.ki+v_pid.ud*v_pid.kd;
14、比例系数v_pid.up=0.5;积分系数v_pid.ui=0.002;微分系数v_pid.ud=0.1;
15、误差单位v_pid.kp=v_pid.target-volout;
16、积分项单位v_pid.ki=t(v_pid.ek),其中v_pid.ek为时间t区间每次误差值;
17、微分项单位v_pid.kd=(v_pid.target-volout)-v_pid.kp_last,其中p_pid.kp_last为上一次误差。
18、所述第三电流路pid的公式为:
19、i_pid.uk=i_pid.up*i_pid.kp+i_pid.ui*i_pid.ki+i_pid.ud*i_pid.kd;
20、比例系数i_pid.up=1.8;积分系数i_pid.ui=0.5;微分系数i_pid.ud=0.005;误差单位i_pid.kp=i_pid.target-mcur;
21、积分项单位i_pid.ki=t(i_pid.ek),其中i_pid.ek为时间t区间每次误差值;
22、微分项单位i_pid.kd=(i_pid.target-mcur)-i_pid.kp_last,其中i_pid.kp_last为上一次误差。
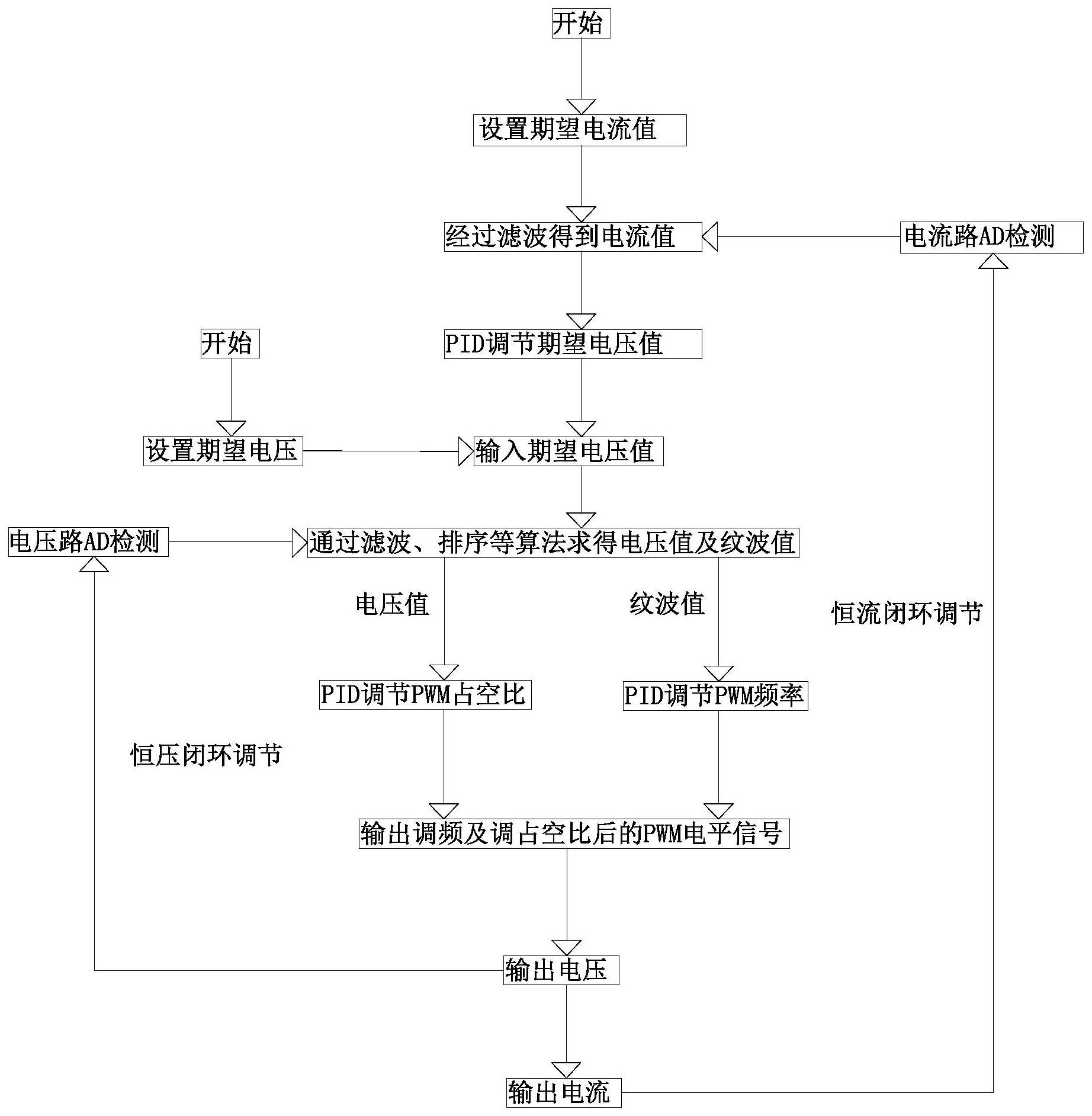
23、所述第一频率路pid、所述第二电压路pid和所述第三电流路pid组合形成恒压或恒流工作模式;恒压工作模式时,设置对所述第二路电压pid设置所述期望电压值v_pid.target,同时所述第一路频率pid也同时运行以消除所述纹波值v_value,输出调频调占空比后的pwm波形;将电机两端电压无限接近期望电压v_pid.target,且纹波接近于所述期望纹波值p_pid.target,得到可以看作恒压的连续的低幅波动电压,在此工程中,一直检测所述电压值volout和所述纹波值v_value,并在所述第一频率路pid和所述第二电压路pid的调整下不断改变pwm的占空比与频率,以形成恒压闭环调节。
24、恒流工作模式时,对所述第三电流路pid设置所述期望电流值i_pid.target,通过调节所述期望电压值v_pid.target,使电机回路电流无限接近于所述期望电流i_pid.target,达到可以看作恒流的状态,并根据检测所述电流值mcur不断调节所述期望电压值v_pid.target,并通过所述第一频率路pid、所述第二电压路pid和所述第三电流路pid运算调整,改变pwm的占空比和频率,形成恒流闭环调节。
25、上述实施例的基于智能摇椅的稳压控制方法,包括电流检测电路、电压检测电路、pwm输出模块以及pid控制系统,控制系统包括第一频率路pid、第二电压路pid和第三电流路pid,pwm输出模块控制mos管输出的非连续性电压变成带有纹波的连续性电压,第一频率路pid控制电压pwm输出频率,可将纹波降到最低,第二电压路pid调节pwm占空比,以达到设置的期望电压,使其可看作小幅波动的恒定电压;当输入电压稳定时通过第三电流路pid调节电压值,使电机电流无限接近设置的期望电流,从而得到恒定电流。具体地,首先通过buck降压电路,将pwm控制的mos管输出的非连续性电压变成带有纹波的连续性电压,再通过pid控制系统控制电压pwm输出频率,可将纹波降到最低,同时通过第二电压路pid调节pwm占空比,达到设置的期望电压,使其可看作小幅波动的恒定电压;当输入电压稳定时,电机的稳定性会较之前有大幅度提升,这时也可通过第三电流路pid调节电压值,使电机电流无限接近设置的期望电流,从而得到较为恒定的电流。当作用于电机的是较为恒定的电流或电压时,电机工作会趋于稳定,且能实时检测电机工作电流和电压,能最大幅度解决摇椅工作时的不平稳和高噪音问题,在增加较小成本的情况下大大地提升用户的使用体验;通过三路pid(即第一频率路pid、第二电压路pid和第三电流路pid)分工调节,在互不干扰的情况下能够共同工作衔接调节,只需两路ad(即电流检测电路、电压检测电路)检测通过控制系统运算后精确控制一路pwm输出即可让摇椅最大限度的稳定工作,提高系统的稳定性,实时性,这种通过pid调节的控制方法能摇椅平稳的低噪音的工作,提升工作质量和减少噪声污染,极大提高用户体验。
- 还没有人留言评论。精彩留言会获得点赞!