一种光伏组件振幅监控系统及方法与流程
本发明涉及光伏组件,特别是涉及一种光伏组件故障实时监测方法及系统。
背景技术:
1、西北地区地广人稀,光伏产业庞大,春秋两季温度和光照强度都适合发电,但大风天气居多,光伏电站往往面积巨大,光伏组件数量极多,随着时间推移,螺栓松动自然发生,如果不及时处理,遇上大风天气会使得光伏组件脱落,砸坏周围的光伏组件、扯断线缆,造成发电资产损失甚至引起火灾。
2、现有技术中缺少应对极端天气的专用光伏组件,增大人员极端天气后的巡检压力,在大风天气不能及时发现问题,导致光伏组件脱落、翻覆造成电量损失,因此,如何提供一种光伏组件振幅监控系统及方法,是目前有待解决的技术问题。
技术实现思路
1、针对上述现有技术存在的问题,本发明的目的是提供一种光伏组件振幅监控系统及方法,本发明通过在光伏组件电池板和支架之间安装振幅传感器和位置传感器,实时监测光伏电池板的振幅数据、光伏电池板和支架的间距,根据振幅数据判断振幅等级,根据振幅等级调整螺栓紧固电机的转速值,根据间距对转速值进行修正,及时紧固支架螺栓,提高光伏组件利用率,还设置有报警模块,当所述振动幅度和所述振动频率不小于预设振幅数据时,计算振动幅度差值、振动频率差值,根据振动幅度差值和振动频率差值确定报警等级,并根据间距差值对报警等级进行调整,解决了缺少应对极端天气的专用光伏组件,增大人员极端天气后的巡检压力,在大风天气不能及时发现问题,导致光伏组件脱落、翻覆造成电量损失的问题。
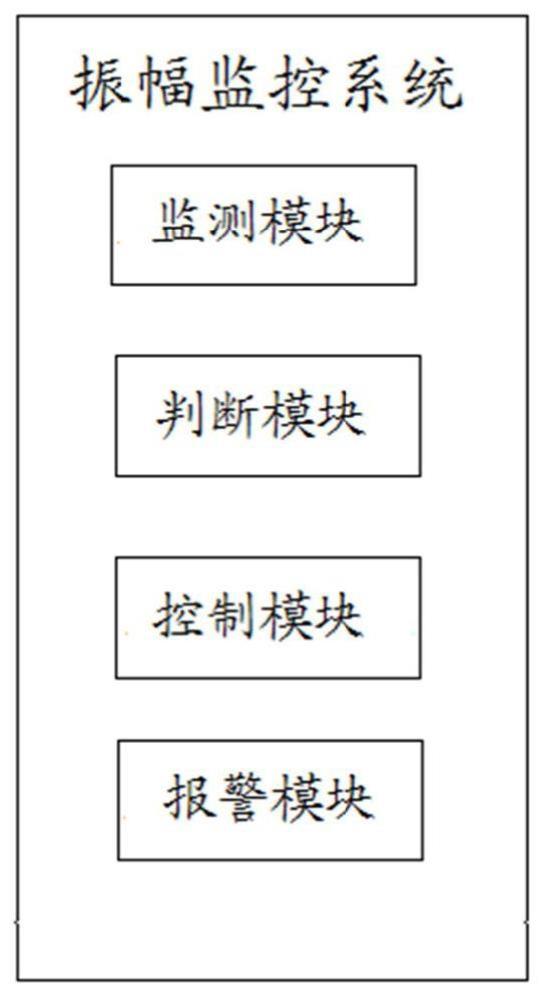
2、为了实现上述目的,本发明提供了一种光伏组件振幅监控系统及方法,所述振幅监控系统包括:
3、监测模块,用于实时监测光伏电池板的振幅数据、所述光伏电池板和支架的间距d0,所述振幅数据包括振动幅度n0和振动频率h0,将所述振动幅度和振动频率以电信号的形式发送到判断模块;
4、判断模块,用于接收所述振动幅度和振动频率的电信号,根据所述振动幅度n0和振动频率h0判断振幅等级;
5、控制模块,用于根据所述振幅等级调整支架螺栓紧固电机的转速值,并根据所述光伏电池板和支架的间距d0对所述转速值进行修正。
6、在本技术的一些实施例中,所述光伏组件振幅监控系统还包括:
7、报警模块,用于当所述振动幅度n0和所述振动频率h0不小于预设振幅数据时,发送报警信号;
8、其中,预设振幅数据包括预设振动幅度阈值n1和预设振动频率阈值h1,当所述振动幅度n0和所述振动频率h0不小于预设振幅数据时,计算所述振动幅度n0和预设振动幅度阈值n1的振动幅度差值、所述振动频率h0和预设振动频率阈值h1的振动频率差值,根据所述振动幅度差值和振动频率差值确定报警等级,发送不同报警等级的报警信号。
9、在本技术的一些实施例中,所述根据所述振动幅度n0和振动频率h0判断振幅等级时,包括:
10、所述判断模块预先设定有第一预设振动幅度l1,第二预设振动幅度l2,第三预设振动幅度l3,第四预设振动幅度l4,且l1<l2<l3<l4<n1;预先设定有第一预设振动频率k1,第二预设振动频率k2,第三预设振动频率k3,第四预设振动频率k4,且k1<k2<k3<k4<h1;预先设定有第一预设振幅等级a1,第二预设振幅等级a2,第三预设振幅等级a3,第四预设振幅等级a4,且a1<a2<a3<a4;
11、当l1<n0≤l2且k1<h0≤k2时,选定第一预设振幅等级a1为当前振幅等级;
12、当l2<n0≤l3且k2<h0≤k3时,选定第二预设振幅等级a2为当前振幅等级;
13、当l3<n0≤l4且k3<h0≤k4时,选定第三预设振幅等级a3为当前振幅等级;
14、当l4<n0<n1且k4<h0<h1时,选定第四预设振幅等级a4为当前振幅等级。
15、在本技术的一些实施例中,所述根据所述振幅等级调整支架螺栓紧固电机的转速值时,包括:
16、所述控制模块预先设定有第一预设转速值v1,第二预设转速值v2,第三预设转速值v3,第四预设转速值v4,且v1<v2<v3<v4;
17、当振幅等级为第一预设振幅等级a1时,选定所述第一预设转速值v1为当前螺栓紧固电机的转速值;
18、当振幅等级为第二预设振幅等级a2时,选定所述第二预设转速值v2为当前螺栓紧固电机的转速值;
19、当振幅等级为第三预设振幅等级a3时,选定所述第三预设转速值v3为当前螺栓紧固电机的转速值;
20、当振幅等级为第四预设振幅等级a4时,选定所述第四预设转速值v4为当前螺栓紧固电机的转速值。
21、在本技术的一些实施例中,所述根据所述光伏电池板和支架的间距d0对所述转速值进行修正时,包括:
22、所述控制模块预先设定有第一预设间距d1,第二预设间距d2,第三预设间距d3,第四预设间距d4,且d1<d2<d3<d4;还预先设定有第一预设转速修正系数α1,第二预设转速修正系数α2,第三预设转速修正系数α3,第四预设转速修正系数α4,且1<α1<α2<α3<α4<1.5;
23、当d0≤d1时,选定所述第一预设转速修正系数α1对所述第i预设转速值进行修正,修正后的转速值为vi*α1;
24、当d1<d0≤d2时,选定所述第二预设转速修正系数α2对所述第i预设转速值进行修正,修正后的转速值为vi*α2;
25、当d2<d0≤d3时,选定所述第三预设转速修正系数α3对所述第i预设转速值进行修正,修正后的转速值为vi*α3;
26、当d3<d0≤d4时,选定所述第四预设转速修正系数α4对所述第i预设转速值进行修正,修正后的转速值为vi*α4。
27、在本技术的一些实施例中,所述根据所述振动幅度差值和振动频率差值确定报警等级时,包括:
28、所述报警模块预先设定有第一预设振动幅度差值k1,第二预设振动幅度差值k2,第三预设振动幅度差值k3,第四预设振动幅度差值k4,且0<k1<k2<k3<k4;预先设定有第一预设振动频率差值f1,第二预设振动频率差值f2,第三预设振动频率差值f3,第四预设振动频率差值f4,且f1<f2<f3<f4;预先设定有第一预设报警等级p1,第二预设报警等级p2,第三预设报警等级p3,第四预设报警等级p4;
29、当0≤n0-n1≤k1且0≤h0-h1≤f1时,选定所述第一预设报警等级p1为当前报警等级;
30、当k1<n0-n1≤k2且f1<h0-h1≤f2时,选定所述第二预设报警等级p2为当前报警等级;
31、当k2<n0-n1≤k3且f2<h0-h1≤f3时,选定所述第三预设报警等级p3为当前报警等级;
32、当k3<n0-n1≤k4且f3<h0-h1≤f4时,选定所述第四预设报警等级p4为当前报警等级。
33、在本技术的一些实施例中,所述报警模块还用于根据当所述光伏电池板和支架的间距d0不小于预设间距阈值d5时,计算间距差值,根据间距差值对报警等级进行调整;
34、所述报警模块预先设定有第一预设间距差值s1,第二预设间距差值s2,且0<s1<s2;
35、当0≤d0-d5<s1时,将所述报警等级pi调升一级,最终的风险等级为p(i+1),最高报警等级为p4;
36、当s1≤d0-d5<s2时,将所述报警等级pi调升二级,最终的风险等级为p(i+2),最高报警等级为p4;
37、当s2≤d0-d5时,将所述报警等级pi调升三级,最终的风险等级为p(i+3),最高报警等级为p4。
38、在本技术的一些实施例中,还包括一种光伏组件振幅监控方法:
39、实时监测光伏电池板的振幅数据、所述光伏电池板和支架的间距d0,所述振幅数据包括振动幅度n0和振动频率h0,将所述振动幅度和振动频率以电信号的形式发送到判断模块;
40、接收所述振动幅度和振动频率的电信号,根据所述振动幅度n0和振动频率h0判断振幅等级;
41、根据所述振幅等级调整支架螺栓紧固电机的转速值,并根据所述光伏电池板和支架的间距d0对所述转速值进行修正。
42、在本技术的一些实施例中,所述光伏组件振幅监控方法还包括:
43、当所述振动幅度n0和所述振动频率h0不小于预设振幅数据时,发送报警信号;
44、其中,预设振幅数据包括预设振动幅度阈值n1和预设振动频率阈值h1,当所述振动幅度n0和所述振动频率h0不小于预设振幅数据时,计算所述振动幅度n0和预设振动幅度阈值n1的振动幅度差值、所述振动频率h0和预设振动频率阈值h1的振动频率差值,根据所述振动幅度差值和振动频率差值确定报警等级,发送不同报警等级的报警信号。
45、在本技术的一些实施例中,当所述光伏电池板和支架的间距d0不小于预设间距阈值d5时,计算间距差值,根据间距差值对所述报警等级进行调整。
46、本发明提供了一种光伏组件振幅监控系统及方法,相较现有技术,具有以下有益效果:
47、(1)通过在光伏组件电池板和支架之间安装振幅传感器和位置传感器,实时监测光伏电池板的振幅数据、光伏电池板和支架的间距,并根据振幅数据调整螺栓紧固电机的转速值,针对大风极端天气,提高光伏组件发电效率;
48、(2)设置有报警模块,当所述振动幅度和所述振动频率不小于预设振幅数据时,计算振动幅度差值、振动频率差值,根据振动幅度差值和振动频率差值确定报警等级,降低巡检人员极端天气后的巡检压力,在大风天气能及时发现问题。
- 还没有人留言评论。精彩留言会获得点赞!