非接触式微型压电驱动器及驱动方法
本发明属于微型旋转机械动力驱动领域,具体涉及一种非接触式微型压电驱动器及驱动方法。
背景技术:
1、随着科学技术的飞速发展,无论是传统制造业还是高精尖的极端工况领域,工业产品不断向着微型化和智能化方向发展,以轻量化、集成化和智能化为主要特征的微型旋转机械所用驱动器的需求越来越大,响应速度快、过载能力好和使用寿命长等反映驱动器性能的指标提出了更高的要求。压电驱动是将压电体的变形能转换为传动机构的动能来驱动输出轴旋转。这种运动具有位移分辨率高、抗电磁干扰强、结构简单且易于微型化和控制等优点,使得采用压电驱动的微型驱动器产业化的发展速度异常迅猛,可应用于微型机器人、高精度定位机构、光学变焦系统等领域。
2、现有技术中,压电堆施加电压信号后将产生线性微形变,现有技术中采用单压电堆作为能量转换元件的驱动器多常见于直线驱动器,而单压电堆作为动力源的旋转驱动器目前大都基于惯性冲击原理,设计不同形式的位移放大机构,将压电堆的线性微位移转变成放大机构的摆动位移,驱使与放大机构接触并施加一定预紧力的转子产生步进式转动,带动与转子固联的输出轴旋转输出动力,实现不同能量形式的转化。采用上述方案的旋转驱动器,放大机构与转子之间为面接触并施加一定的预紧力,长时间工作后接触面会因为摩擦产生损耗,逐渐降低驱动器的响应速度、旋转精度甚至定子与转子接触面之间发生打滑现象导致堵转,影响驱动器的使用寿命。
技术实现思路
1、本发明的目的在于提供一种非接触式微型压电驱动器及驱动方法,解决定、转子间因摩擦驱动产生的损耗,革新定、转子间驱动方式,提供一种非接触式微型压电驱动器及驱动方法。
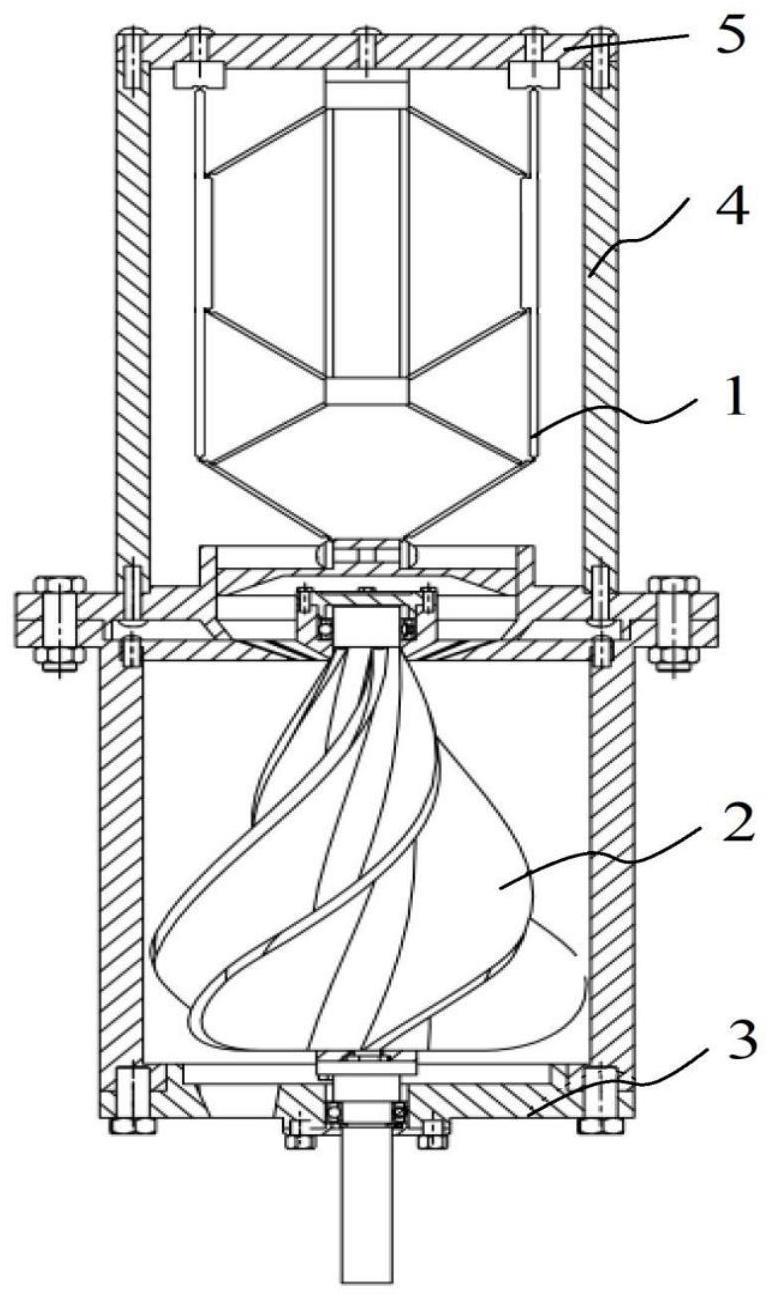
2、一种非接触式微型压电驱动器,包括:
3、驱动部件1,用于驱动传动部件2转动,其包括:
4、压电堆11和位移放大元件12,所述压电堆11用于产生纵向位移,所述位移放大元件12用于将压电堆11产生的纵向位移放大;压电堆11设置于位移放大元件12内;所述位移放大元件12的上端通过螺钉固定设置;
5、活塞13和压缩气筒座14,两者与传动部件2中的上轴承座22围成密闭容腔;
6、所述压缩气筒座14通过螺钉固定设置,包括一圆台筒腔体,其沿轴向分布的横截面积不同;所述活塞13通过螺钉固定于位移放大元件12的下端,并随着位移放大元件12沿轴向移动以改变组成密闭容腔的圆台筒腔体的体积;所述压缩气筒座14可拆卸地设置于上壳体41;
7、所述传动部件2,用于将位移放大机构的直线运动转化为输出轴的旋转运动,其置于下壳体42内,下壳体42与上壳体41可拆卸连接,上轴承座22可拆卸地设置于下壳体42的内壁,其还包括:
8、风动陀螺转子23,密闭容腔中气压增大时,气体由上轴承座22上开设的第一圆台孔吹向风动陀螺转子23的顶部,其顶端设有转轴,转轴与上单向轴承配合,上单向轴承与上轴承座22上的圆柱筒形成的轴承座孔配合,其底端设有螺纹孔与输出轴25螺纹连接;
9、上轴承端盖21,用于定位上单向轴承的外圈,通过螺钉固联在上轴承座22的圆柱筒的上端面;
10、输出轴25,可随着风动陀螺转子23旋转,其通过下单向轴承26设置于底座部件3上;
11、所述底座部件3用于沿轴向限位输出轴25,通过螺钉固联在下壳体42的下端面,其上开设连通第一圆台孔的第二圆台孔。
12、优选地,所述位移放大元件12包括:
13、第一柔性铰链121,为菱形薄板结构,菱形一对角线两端设置托座1211,用于放置压电堆11,菱形另一对角线两端与第二柔性铰链122固接于一体;
14、第二柔性铰链122,为杠杆式薄板结构,上方台座通过螺栓与上盖5固联,下方与第三柔性铰链123的l型板1232柔性铰接;第二柔性铰链122的立板一1221与第一柔性铰链的立板1213固接;
15、所述第三柔性铰链123为杠杆式薄板结构,靠近第二柔性铰链122的一端为斜板一1231,其与第一柔性铰链121的托座1211柔性铰接,另一端用螺栓与活塞13固联。
16、优选地,所述输出轴25,可随着风动陀螺转子23旋转,其包括:柱体251、轴肩一252、轴肩二253、轴承安装段、挡圈凹槽254和输出段;
17、柱体251上加工外螺纹,通过弹性垫圈24与陀螺转子23端面中心的内螺纹孔配合;
18、挡圈凹槽254上放置轴承挡圈27;
19、下单向轴承26安装于轴承安装段,两侧分别靠轴肩二253和轴承挡圈27定位;弹性垫圈24由轴肩一252和陀螺转子23端面定位。
20、一种非接触式微型压电驱动方法,包括以下步骤:
21、通入上升沿锯齿波电压信号时:压电堆11轴向伸长,产生微形变经与之过盈配合的位移放大元件12放大后推动活塞13沿压缩气筒座14内腔的轴向向下运动;活塞13、压缩气筒座14和上轴承座22围成的密闭容腔体积缩小,腔内的气体被压缩,气压增大,该压缩气体通过上轴承座22上的第一圆台孔后,吹向传动部件2中陀螺转子23的顶部,压缩气流驱动陀螺转子23旋转,陀螺转子23带动与之固联的输出轴25旋转,输出动力;
22、其中,压缩气流吹向陀螺转子23顶部后沿转子23翼片之间的螺旋空腔流向翼片根部,再顺着下底座31端面中心的第二圆台孔排出驱动器外,降低压缩气体在下圆柱壳体42内集聚阻碍转子23运动;
23、电信号变为下降沿锯齿波信号时:压电堆11纵向收缩,恢复初始状态,与之过盈配合的位移放大元件12复位,拉动活塞13沿压缩气筒座内腔的轴向向上运动,活塞13、压缩气筒座14和上轴承座22围成的密闭容腔体积增大,腔内形成部分真空,容腔外部气体在大气压力作用下经下底座31端面中心设有的第二圆台孔和上轴承座22上的第一圆台孔进入密闭容腔,准备下一工作过程。
24、与现有技术相比,本发明的优点为:
25、1、本驱动器主要由驱动部件、传动部件、底座部件和上盖四个部分组成。利用周期性锯齿波电压信号施加于压电堆后产生的伸缩微形变经位移放大元件放大后驱动活塞往复运动,周期性改变活塞、压缩气筒座和上轴承座组成的密闭容腔体积,引起腔内气体周期性压力变化,该气体驱动传动部件运动,实现动力的非接触式传动,该驱动器结构简单、体积小、重量轻、易于微型化和控制、响应快、寿命长。
26、2、驱动部件中的位移放大元件为多级放大对称设置的柔性铰链结构。两托座中间放置压电堆,当压电堆施加锯齿波电压信号后,轴向伸长,带动两托座间距增大,与托座垂直的另一对角线,即与左右两个第二柔性铰链中上位置固接处,间距缩小,带动两个第二柔性铰链相互靠拢,因第二柔性铰链为杠杆式薄板结构,固定的上端为支点,带动左右两个第二柔性铰链的下端也相互靠拢。左右两个似z字形杠杆式薄板结构为第三柔性铰链,与左右第二柔性铰链下端柔性铰接,在第二柔性铰链下端相互靠拢的同时,第三柔性铰链铰点也相互靠拢,同时第一柔性铰链托座下移,推动柔性铰接在下托座上的左右第三柔性铰链中的斜板一沿各自长度方向移动,带动与活塞固联的第三柔性铰链下端向下运动,进而推动活塞沿自身轴线向下运动。
27、3、传动部件利用驱动部件和传动部件围成密闭容腔体积变化引起腔内气压变化,驱动自身运动,驱动部件和传动部件通过非接触方式实现动力传递,改变了传统压电电机驱动部件与传动部件依靠接触实现不同运动形式的转换,非接触式动力传递摩擦损耗小、发热量低、过载能力好,工作寿命和效率高,特别适用于高速、小负荷的微型驱动场合。
28、4、上轴承座圆柱筒根部均布设有偏向中心轴线的扇形圆台孔,有利于气流导向和增大吹向风动陀螺转子顶部的气流速度。下底座端面设有与陀螺转子根部翼片斜率相切且沿中心轴线均布的扇形孔,便于吹动陀螺转子旋转的气体排出。
29、5、上盖为凸字型圆柱体结构,上盖下端面设置的竖板和凹槽,便于驱动器通入周期性锯齿波电压信号后,压电堆产生周期性伸缩微形变时压电堆位置、上盖与上圆柱壳体、位移放大元件的有效定位和动力有效传递。
30、6、上轴承座和下底座中心腔体内设置的轴承座孔放置单向轴承,轴向和径向约束输出轴的部分运动自由度,保证输出轴的单向有效旋转。下底座、压缩气筒座和上盖各零件端面均设置凸台结构,保证驱动器装配后底座、上、下壳体、压缩气筒座和上盖两两之间准确定位。
- 还没有人留言评论。精彩留言会获得点赞!