一种永磁同步电机高阶自抗扰速度控制器及方法与流程
本技术涉及电机控制器,特别涉及一种永磁同步电机高阶自抗扰速度控制器及方法。
背景技术:
1、永磁同步电机因其高功率密度、高效率、高控制精度等优势在许多电气传动场合得到应用。其中,速度控制是永磁同步电机最常见的工作模式。当电机系统工作于速度控制模式时,除了要快速准确地响应速度指令以外,还应具备优异的抗扰能力和抑噪性能。
2、对于永磁同步电机速度控制系统,其被控对象可以用简易的一阶惯性环节来表示。然而,该系统还受到多种扰动的影响,包括不确定性扰动(如参数变化、负载突变)、周期性扰动(如电流采样偏差、逆变器非线性、电机齿槽效应、空间磁场谐波)等等。这些因素将导致速度动态调节慢、稳态波动大等问题,因此改善控制器的抗扰特性对提高系统的动态特性和控制精度至关重要。
3、为此,国内外学者陆续提出多种先进的控制方案,包括自适应控制、滑模变结构控制、内模控制、自抗扰控制等等。其中,自抗扰控制创新性地引入集总扰动的概念,将被控对象重构为积分级联标准型与集总扰动合成的形式,极大地简化了控制器的设计。
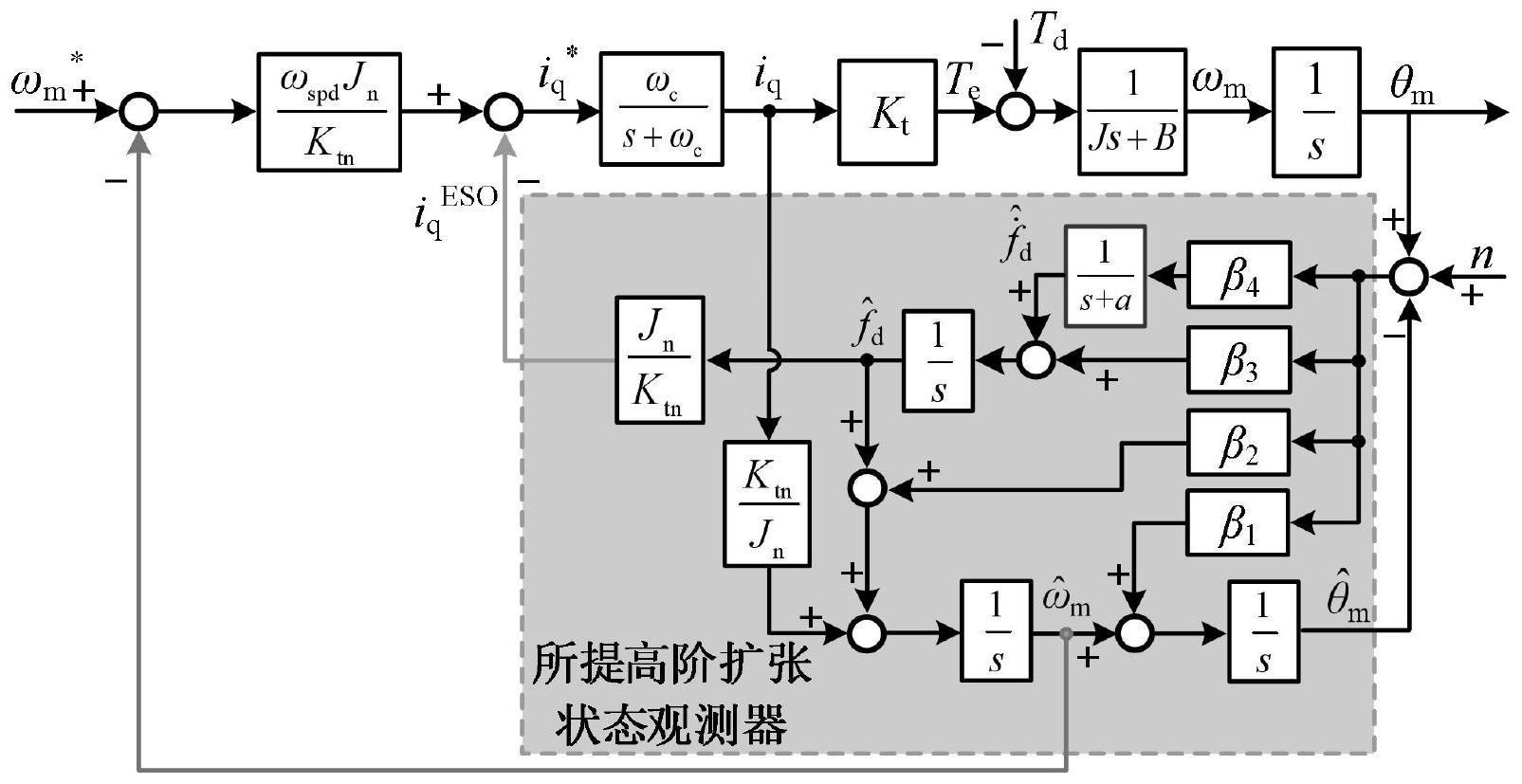
4、图1是现有技术中一种典型的永磁同步电机自抗扰速度控制器的结构框图,其中,c(s)是速度误差反馈控制器,g1(s)是电流环传递函数,g2(s)是被控对象等效模型,td是转矩扰动,是速度给定,是q轴参考电流。其中,扩张状态观测器利用电机位置θm和模型信息实时估计电机速度和转矩扰动,并将估计速度反馈至速度给定侧作误差调节,将估计扰动换算为负载转矩电流反馈至q轴参考电流侧实现对转矩扰动的补偿。
5、扩张状态观测器对扰动的观测、补偿机制一定程度上提升了系统的抗扰能力。通常,观测器增益越高,系统的抗扰能力越强。然而,观测器增益的选取会受到测量噪声的制约,过高的增益将恶化系统的抑噪性能。在增益受限的情况下,控制器对不确定性扰动的响应速率较慢,以至于负载突变时转速变化较大、恢复时间较长。此外,传统扩张状态观测器仅能渐近无偏估计一阶导数趋于零的干扰,无法精确观测时变扰动,这导致速度控制器对周期性扰动衰减能力较低。
6、针对上述问题,国内外学者进行了大量研究。文献“张磊,鲁凯,田伟等.永磁同步电机伺服系统的变增益自抗扰控制器设计[j].微特电机,2020,48(08):35-38.”设计了变增益自抗扰控制器,改善控制器的抗负载扰动能力。然而变增益结构加剧了控制器的复杂程度,不便于理论分析和实际应用。文献“h.sira-ramírez,j.linares-floresc,garcía-rodríguez等.on the control ofthe permanent magnet synchronous motor:an activedisturbance rejection control approach[j].ieee trans.control syst.technol,2014,22(05),2056-2063.”提出了广义积分观测器(gpio)估计扰动,该观测器本质是扩张状态观测器的高阶形式,其中包含了对扰动高阶微分的估计,因此提高了扰动估计精度。然而,广义积分观测器的峰值现象较严重,当负载出现阶跃扰动时速度响应会有较大超调。文献“g.wang,r.liu,n.zhao等.enhanced linearadrc strategy for hf pulse voltagesignal injection-based sensorless ipmsm drives[j].ieee trans.power electron.,2019,34(01),514-525.”提出将两个扩张状态观测器级联使用,增强了系统对斜坡负载扰动的抑制能力。但是,级联型观测器本质上也是提高了扩张状态观测器的阶数,在抑制阶跃扰动时无法避免超调问题。
技术实现思路
1、本技术提供了一种永磁同步电机高阶自抗扰速度控制器及方法,同现有方案相比,该控制器改变了状态观测器的扩张微分项,由此提升了控制系统抗扰函数的阻尼特性,改善了高阶自抗扰速度控制器对阶跃扰动的动态响应。
2、本技术的技术方案如下:
3、本技术提供一种永磁同步电机高阶自抗扰速度控制器,包括转速误差计算单元、转速误差调节器、高阶扩张状态观测器以及q轴参考电流计算模块;所述高阶扩张状态观测器包括实时位置估计单元、实时转速估计单元、实时扰动估计单元和实时扰动微分估计单元;所述q轴参考电流计算模块包括q轴初始参考电流计算单元和q轴参考电流限幅单元;
4、所述高阶扩张状态观测器的输入端与含有量化噪声n的位置采集信号θm相连,高阶扩张状态观测器的第一输出端与转速误差计算单元相连,高阶扩张状态观测器的第二输出端与q轴参考电流计算模块相连;
5、所述转速误差计算单元的输出端与转速误差调节器的输入端相连;
6、所述转速误差调节器的输出端与q轴参考电流计算模块输入端相连;
7、所述高阶扩张状态观测器的实时扰动微分估计单元引入阻尼因子,位置估计误差经过放大增益以及包含阻尼因子的低通滤波器后得到扰动微分估计值,将当前反馈位置、当前采集电流和扰动微分估计值结合计算得到转速估计变量和负载转矩电流补偿值信号。
8、进一步的,得到转速估计变量和负载转矩电流补偿值信号的实现方法包括如下步骤:
9、步骤1),采集永磁同步电机轴端安装编码器的数字脉冲m,将其换算为电机当前周期弧度制的角度值,电机角度值θm的计算公式为:
10、
11、其中,ppr是每个机械周期电机编码器的脉冲数;
12、步骤2),定义并初始化高阶扩张状态观测器的状态变量分别为电机的位置估计变量转速估计变量扰动估计变量以及扰动微分估计变量
13、步骤3),计算位置估计偏差e(k),其公式如下:
14、
15、其中,是上一周期位置估计值;
16、步骤4),计算当前周期的位置估计值转速估计值扰动估计值以及扰动微分估计值其迭代公式为:
17、
18、其中,ts是控制周期;是上一周期转速估计值,是上一周期扰动估计值,是上一周期扰动微分估计值;β1是高阶扩张状态观测器第一增益,β2是高阶扩张状态观测器的第二增益,β3是高阶扩张状态观测器的第三增益,β4是高阶扩张状态观测器的第四增益;a是高阶扩张状态观测器的阻尼因子;ktn是永磁同步电机转矩系数标称值,jn永磁同步电机转子惯量和负载惯量总和的标称值;iq(k)是当前周期永磁同步电机的q轴电流;
19、步骤5),根据步骤4)所得的扰动估计值,计算负载转矩电流补偿值,其计算公式为:
20、
21、进一步的,所述转速误差调节器的实现方法包括如下步骤:
22、步骤1),由高阶扩张状态观测器获得电机的转速于是,当前时刻转速跟踪误差spd_e(k)的计算公式为:
23、
24、其中,是转速给定值;
25、步骤2),转速误差调节器采用比例调节器,调节器的比例系数设定为:
26、
27、其中,kp是误差比例调节器的比例系数,ωspd是速度环设计带宽;
28、步骤3),计算转速误差调节器的输出值spd_p_out(k):
29、spd_p_out(k)=kp*spd_e(k)。
30、进一步的,q轴参考电流计算模块的实现包含如下步骤:
31、步骤1),根据转速误差调节器的输出值、高阶扩张状态观测器的负载转矩电流补偿值,计算得到q轴初始参考电流如下:
32、
33、步骤2),对q轴初始参考电流限定幅值,得到q轴电流参考值,限幅公式如下:
34、
35、其中,是q轴电流的限幅值,是限幅后的电流参考值。
36、进一步的,所述高阶扩张状态观测器的阻尼因子a的取范围为值a∈(ωspd,1.5ωspd)。
37、本技术还提供一种永磁同步电机高阶自抗扰速度控制方法,包括如下步骤:
38、设置转速误差计算单元、转速误差调节器、高阶扩张状态观测器以及q轴参考电流计算模块;所述高阶扩张状态观测器包括实时位置估计单元、实时转速估计单元、实时扰动估计单元和实时扰动微分估计单元;所述q轴参考电流计算模块包括q轴初始参考电流计算单元和q轴参考电流限幅单元;
39、所述高阶扩张状态观测器的输入端与含有量化噪声n的位置采集信号θm相连,高阶扩张状态观测器的第一输出端与转速误差计算单元相连,高阶扩张状态观测器的第二输出端与q轴参考电流计算模块相连;
40、所述转速误差计算单元的输出端与转速误差调节器的输入端相连;
41、所述转速误差调节器的输出端与q轴参考电流计算模块输入端相连;
42、所述高阶扩张状态观测器的实时扰动微分估计单元引入阻尼因子,位置估计误差经过放大增益以及包含阻尼因子的低通滤波器后得到扰动微分估计值,将当前反馈位置、当前采集电流和扰动微分估计值结合计算得到转速估计变量和负载转矩电流补偿值信号。
43、进一步的,得到转速估计变量和负载转矩电流补偿值信号的实现方法包括如下步骤:
44、步骤1),采集永磁同步电机轴端安装编码器的数字脉冲m,将其换算为电机当前周期弧度制的角度值,电机角度值θm的计算公式为:
45、
46、其中,ppr是每个机械周期电机编码器的脉冲数;
47、步骤2),定义并初始化高阶扩张状态观测器的状态变量分别为电机的位置估计变量转速估计变量扰动估计变量以及扰动微分估计变量
48、步骤3),计算位置估计偏差e(k),其公式如下:
49、
50、其中,是上一周期位置估计值;
51、步骤4),计算当前周期的位置估计值转速估计值扰动估计值以及扰动微分估计值其迭代公式为:
52、
53、其中,ts是控制周期;是上一周期转速估计值,是上一周期扰动估计值,是上一周期扰动微分估计值;β1是高阶扩张状态观测器第一增益,β2是高阶扩张状态观测器的第二增益,β3是高阶扩张状态观测器的第三增益,β4是高阶扩张状态观测器的第四增益;a是高阶扩张状态观测器的阻尼因子;ktn是永磁同步电机转矩系数标称值,jn永磁同步电机转子惯量和负载惯量总和的标称值;iq(k)是当前周期永磁同步电机的q轴电流;
54、步骤5),根据步骤4)所得的扰动估计值,计算负载转矩电流补偿值,其计算公式为:
55、
56、进一步的,所述转速误差调节器的实现方法包括如下步骤:
57、步骤1),由高阶扩张状态观测器获得电机的转速于是,当前时刻转速跟踪误差spd_e(k)的计算公式为:
58、
59、其中,是转速给定值;
60、步骤2),转速误差调节器采用比例调节器,调节器的比例系数设定为:
61、
62、其中,kp是误差比例调节器的比例系数,ωspd是速度环设计带宽;
63、步骤3),计算转速误差调节器的输出值spd_p_out(k):
64、spd_p_out(k)=kp*spd_e(k)。
65、进一步的,q轴参考电流计算模块的实现包含如下步骤:
66、步骤1),根据转速误差调节器的输出值、高阶扩张状态观测器的负载转矩电流补偿值,计算得到q轴初始参考电流如下:
67、
68、步骤2),对q轴初始参考电流限定幅值,得到q轴电流参考值,限幅公式如下:
69、
70、其中,是q轴电流的限幅值,是限幅后的电流参考值。
71、进一步的,所述高阶扩张状态观测器的阻尼因子a的取范围为值a∈(ωspd,1.5ωspd)。
72、综上所述,本技术的有益效果有:
73、1.抑制不确定性扰动的能力增强,在保证相近的抑噪特性下,本发明具有比传统自抗扰控制器更优的抗扰能力,本技术所提方案扰动抑制速率更快,负载突变造成的转速变动减小,恢复时间缩短;
74、2.抵抗阶跃扰动的动态响应改善,在速度环出现转矩阶跃扰动时,本技术所提方案比传统高阶自抗扰控制器的反向超调更小;
75、3.结构简单灵活,本技术引入的阻尼因子不会增加观测器的复杂性,误差反馈控制律仅使用线性比例调节器,因此结构简单,参数调节方便。
- 还没有人留言评论。精彩留言会获得点赞!