一种同步电机控制算法
本发明涉及一种基于npc结构三电平逆变器隐去中矢量的同步电机控制目标磁链简化算法,具体适用于优化扇区划分、实现中点电位的平衡控制。
背景技术:
1、目前,两电平逆变器受限于半导体器件的开关应力和额定功率等级,不能适配诸如矿井提升、机车牵引等大功率负载应用场合。与两电平逆变器相比,二极管箝位npc三电平逆变器通过一组串联的电容器将直流母线电压细分为三电平,从而避免了单个半导体器件压降过大的问题,配合三相对称半导体器件的串联分布及svpwm算法,输出电压波形的质量更好、单个器件的开关损耗更低,使其在上述高压大功率设备中应用广泛。
2、当直流侧采用单个整流器供电时,电容器的均压问题是npc逆变器控制的难题。现有技术也考虑了很多方法解决这一问题:
3、方法一:提出引入正负矢量时间调节因子,利用pi控制器对电容器电压进行调节,但对pi参数的整定过程,存在大量的假设及重复验证。
4、方法二:提出采用有源电桥电压斩波器来控制电容器电压,但该方法调节电压范围的能力有限。
5、方法三:提出给每个电容器用单独隔离的buck/boost直流电源供电,该方法易导致硬件及维护成本增加。
6、方法四:提出一种“预估-校验-修正”的零序电压注入方法,采用三相正序电压符号来预估所需注入的零序电压,再利用判断规则进行校验及修正,得到符合要求的零序电压。
7、方法五:提出一种基于就近虚拟矢量的调制方法,该方法消除了中矢量对电容器电压波动的影响,但计算过程涉及电压矢量的跨扇区合成,输出的电压波形存在奇次谐波分量大的问题量。
技术实现思路
1、本发明的目的是克服现有技术中存在的npc结构三电平逆变器中点电位不平衡导致电容器充放电不均衡的问题,提供了一种实现中点电位的平衡控制的基于npc结构三电平逆变器隐去中矢量的同步电机控制目标磁链简化算法。
2、为实现以上目的,本发明的技术解决方案是:
3、一种同步电机控制算法,所述目标磁链简化算法用于控制永磁同步电机的npc结构三电平逆变电路,
4、步骤一:分析npc结构三电平逆变器直流侧中点电位不平衡机理,得出中矢量对电容c1、c2的电压值影响不可控的结论;
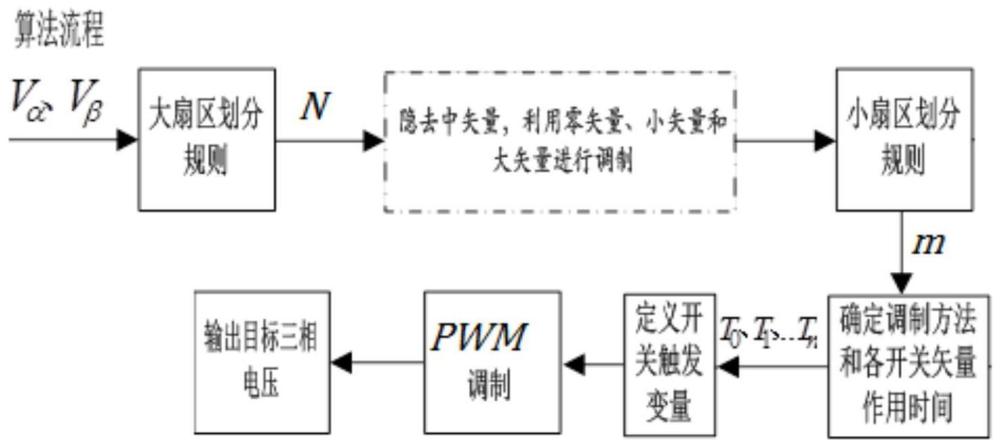
5、步骤二:划分输入电压空间矢量大、小扇区,对svpwm算法进行改进:以隐去中矢量,利用零矢量、小矢量、大矢量进行调制为原则,将电压空间矢量经过的区域划分为不对称的18扇区;
6、步骤三:整理电压各小扇区逆变器开关顺序,形成开关顺序图表,为减少开关器件的应力,通常一个开关周期tsw范围内逆变器先后输出7个对称电压矢量,根据目标空间电压矢量vref落入的扇区号,制定基本电压矢量的作用顺序表;
7、步骤四:确定各开关矢量的作用时间、形成svpwm的控制模型,选取大扇区内左侧的矢量vs1、右侧的矢量vs2及零矢量vs0合成目标电压矢量vref,vs1、vs2、vs0矢量作用时间分别对应为t1、t2、t0,根据不同小扇区的矢量合成规律,分别计算出在各小扇区内的各矢量作用时间;然后根据基本矢量作用时间得出各扇区对应的组合开关控制脉冲情况,最后根据各扇区的开关状态和触发时间,梳理各扇区开关器件触发时间表形成svpwm的控制模型。
8、所述npc结构三电平逆变电路中的直流母线电压为vdc,直流母线上串联了两个相同容值的电容c1、c2,电容c1、c2的连接处为直流侧中点o,直流侧正极点为p点,直流侧负极点为n点;所述npc结构三电平逆变电路将直流电逆变为三相电,电路中设置三相桥臂,每相桥臂有四个并联续流二极管dxn后串联的igbt管sxn,并设置两个箝位二极管dx5、dx6,两个串联igbt管的中点通过箝位二极管和直流侧电容的中点o相连接,使输出电压被箝位在直流侧中点o的电位,即每个igbt管上的电压就限制在一个电容电压上,箝位二极管dx5、dx6的另一个作用就是在igbt管导通时提供电流通道防止电容短路;每相桥臂的中点连接负载后连接到负载中点o’;上文角标中:x表征a、b、c三相中任一相,n表征各相开关管序号,取值范围为1~4;
9、所述步骤一的分析过程如下:
10、传统npc三电平电压型逆变器,可输出三种电压,即::vdc/2、0和-vdc/2;
11、igbt管的开关变量sxn取值只有1和0两种,对应x相电路的工作状态见表1:
12、表1开关信号与x相电路工作状态表
13、
14、逆变器输出电压表示成矩阵形式:
15、
16、上式中:上式中:ua为逆变器输出的a相电压,ub为逆变器输出的b相电压,uc为逆变器输出的c相电压,ua为a相桥臂的输出电压,ub为b相桥臂的输出电压,uc为c相桥臂的输出电压;
17、定义三相电压空间矢量us,则有:
18、
19、上式中:sa为a相桥臂的开关变量,sb为b相桥臂的开关变量,sc为c相桥臂的开关变量,j代表虚轴;
20、由式(2)可知,3个开关信号能输出27个电压空间矢量,包含零矢量、幅值为的小矢量、幅值为的中矢量以及幅值为的大矢量;
21、定义直流侧中点电压为v0,中点电流为i0,流过电容器c1、c2的电流分别为ic1、ic2,电容器实时电压值为vc1、vc2,初始电压值为vc10、vc20,则:
22、
23、直流侧电容器c1、c2两端电压和电流可表示为:
24、
25、由式(4)可知,直流侧中点电位不平衡的主要原因是中点电流i0对直流环节电容器充/放电不均衡;在大矢量开关状态时电流回路不经过直流侧中点o,此时i0=0,因此大矢量对中点电压v0无影响;在中矢量开关状态时电流由p点经a相上桥臂流向负载中点o′,三相负载的另外两相分别由直流侧中点o及n点经b相、c相下桥臂流入/流出,取i0为流入/流出直流侧中点o的电流,可得b相电流流入母线时,电容c1充电、c2放电;b相电流流出母线时,电容c1放电、c2充电;因i0方向无法确定,中矢量对电容c1、c2的电压值影响不可控;而互为冗余的小矢量开关状态电流对直流侧中点o的作用大小相等、方向相反,通过调节小矢量及冗余小矢量作用时间,可实现中点电位的平衡控制。
26、所述步骤二的具体划分方法如下:
27、2.1在互相垂直的α、β矢量坐标系内,将α、β矢量坐标系等分为6大扇区,与α轴夹角θ为0~60度的为3号大扇区;与α轴夹角θ为60~120度的为1号大扇区;与α轴夹角θ为120~180度的为5号大扇区;与α轴夹角θ为180~240度的为4号大扇区;与α轴夹角θ为240~300度的为6号大扇区;与α轴夹角θ为300~360度的为2号大扇区;
28、2.2隐去中矢量,利用零矢量、小矢量、大矢量进行调制,根据上述调制方式,则每个扇区内仅需要划分为3个小扇区,划分规律如下;
29、零矢量对应坐标原点,在每个大扇区内完全由小矢量进行调制的区域属于1号小扇区,完全由大矢量进行调制的区域属于2号小扇区,由一个大矢量和一个小矢量协同调制的区域属于3号小扇区;
30、目标电压矢量为vref,目标电压矢量vref与α轴夹角为θ,根据夹角θ的角度判定电压矢量为vref所在的大扇区的编号,然后将目标电压矢量vref的θ角折算至3号大扇区,得到折算角θ’:
31、
32、将目标电压矢量vref的大扇区号与小扇区号结合,即可得到目标电压矢量为vref的完整扇区号;
33、在划分一个大矢量和一个小矢量协同调制的区域即3号小扇区时,划分规则为:采用大扇区内左侧的大矢量与右侧的小矢量合成协同调制的目标电压矢量vref;
34、则可以得出根据vα和vβ的值判定其小扇区编号的判定规则,判定规则如下:
35、同时满足属于1号小扇区;
36、同时满足属于2号小扇区;
37、同时满足属于3号小扇区。
38、在划分一个大矢量和一个小矢量协同调制的区域即3号小扇区时,划分规则为:采用大扇区内右侧的大矢量与左侧的小矢量合成协同调制的目标电压矢量vref;
39、则可以得出根据vα和vβ的值判定其小扇区编号的判定规则,判定规则如下:
40、同时满足属于1号小扇区;
41、同时满足属于2号小扇区;
42、同时满足属于3号小扇区。
43、所述步骤三:整理电压各小扇区逆变器开关顺序,形成开关顺序图表,为减少开关器件的应力,通常一个开关周期tsw范围内逆变器先后输出7个对称电压矢量,根据目标空间电压矢量vref落入的扇区号,制定基本电压矢量的作用顺序表;如表2所示:
44、表2空间电压矢量作用顺序表
45、 扇区号 <![cdata[t<sub>0</sub>/4]]> <![cdata[t<sub>1</sub>/2]]> <![cdata[t<sub>2</sub>/2]]> <![cdata[t<sub>0</sub>/2]]> <![cdata[t<sub>2</sub>/2]]> <![cdata[t<sub>1</sub>/2]]> <![cdata[t<sub>0</sub>/4]]> 31 0 -1 -1 0 0 -1 0 0 0 1 0 0 0 0 0 0 0 -1 0 -1 -1 32 0 -1 -1 1 -1 -1 1 1 -1 1 0 0 1 1 -1 1 -1 -1 0 -1 -1 33 0 0 -1 0 -1 -1 1 1 -1 1 1 0 1 1 -1 0 -1 -1 0 0 -1 11 0 0 -1 0 1 0 0 0 0 1 1 0 0 0 0 0 1 0 0 0 -1 12 0 0 -1 1 1 -1 -1 1 -1 1 1 0 -1 1 -1 1 1 -1 0 0 -1 13 -1 0 -1 0 0 -1 -1 1 -1 0 1 0 -1 1 -1 0 0 -1 -1 0 -1 51 -1 0 -1 -1 0 0 0 0 0 0 1 0 0 0 0 -1 0 0 -1 0 -1 52 -1 0 -1 -1 1 -1 -1 1 1 0 1 0 -1 1 1 -1 1 -1 -1 0 -1 53 -1 0 0 -1 0 -1 -1 1 1 0 1 1 -1 1 1 -1 0 -1 -1 0 0 41 -1 0 0 0 0 0 0 0 1 0 1 1 0 0 1 0 0 0 -1 0 0 42 -1 0 0 -1 1 1 -1 -1 1 0 1 1 -1 -1 1 -1 1 1 -1 0 0 43 -1 -1 0 -1 0 0 -1 -1 1 0 0 1 -1 -1 1 -1 0 0 -1 -1 0 61 -1 -1 0 0 -1 0 0 0 0 0 0 1 0 0 0 0 -1 0 -1 -1 0 62 -1 -1 0 -1 -1 1 1 -1 1 0 0 1 1 -1 1 -1 -1 1 -1 -1 0 63 0 -1 0 -1 -1 0 1 -1 1 1 0 1 1 -1 1 -1 -1 0 0 -1 0 21 0 -1 0 0 0 0 1 0 0 1 0 1 1 0 0 0 0 0 0 -1 0 22 0 -1 0 1 -1 1 1 -1 -1 1 0 1 1 -1 -1 1 -1 1 0 -1 0 23 0 -1 -1 0 -1 0 1 -1 -1 1 0 0 1 -1 -1 0 -1 0 0 -1 -1
46、所述表2中制定基本电压矢量的作用顺序。
47、所述步骤四中,选取大扇区内左侧的矢量vs1、右侧的矢量vs2及零矢量vs0合成目标电压矢量vref,vs1、vs2、vs0矢量作用时间记为t1、t2、t0,则有:
48、
49、根据不同小扇区的矢量合成规律,分别计算出在各小扇区内的各矢量作用时间,定义中间变量可计算出t1、t2、t0值为:
50、
51、表3电压空间矢量作用时间判定
52、
53、联合表(2)及式(7),解出各扇区基本矢量作用时间,然后根据基本矢量作用时间得出各扇区对应的组合开关控制脉冲情况;
54、由于采取不对称扇区调制,本算法输出包含9种不同类型的脉冲,采用5脉冲输出,定义开关触发变量x、y、z、u、v、w,取:
55、
56、定义控制器扫描周期为tsw,将各触发变量与周期为tsw、幅值为0.5tsw的等腰三角载波进行比较,三角载波瞬时值大于触发变量,输出1脉冲;反之输出0脉冲,根据各扇区的开关状态和触发时间,梳理各扇区开关器件触发时间表形成svpwm的控制模型。
57、所述目标磁链简化算法还包括:步骤五:仿真验证,利用simulink建立该算法仿真平台,对得到的svpwm的控制模型进行仿真运算,比较其波形质量以及谐波水平。
58、与现有技术相比,本发明的有益效果为:
59、1、本发明一种控制的同步电机控制算法步骤二中采用隐去中矢量,利用零矢量、小矢量、大矢量进行调制的方式,消除了中矢量电容c1、c2的电压值影响不可控性,仅利用零矢量、小矢量、大矢量进行调制,可实现中点电位的平衡控制。
60、2、本发明一种控制的同步电机控制算法步骤二中合成各扇区的空间电压矢量仅涉及小矢量及大矢量。相较于传统36扇区三电平svpwm算法,运算量减少一半。
61、3、本发明一种控制的同步电机控制算法步骤三中的逆变器开关周期范围先后输出7个对称电压矢量,有效减少逆变器输出线电压的畸变率,提高输出波形质量。
- 还没有人留言评论。精彩留言会获得点赞!