一种逐日光伏组件的制作方法
本发明涉及逐日光伏,更具体地说,涉及一种逐日光伏组件。
背景技术:
1、随着科学技术的发展以及节能减排、环保新能源技术的普及,为了获取足够的生存能源,人类对自然界和未知环境的能源探索从未间断过,光伏发电作为一种新能源的利用方式,利用太阳能光电板进行光电转换得到了社会各界的支持,近些年来在我国的城市、乡镇,太阳能光电板得到了迅速普及。
2、目前光伏发电跟踪装置主要分为单轴跟踪与双轴跟踪装置两种,相较于单轴跟踪装置,双轴装置的跟踪精度较高,但由于传统的双轴跟踪装置的跟踪策略单一,造成跟踪精度不高、光电转化率低和装置应急性能不足问题,常见的光电跟踪策略受天气影响大,视日运动轨迹跟踪策略跟踪精度不高,存在阴天情况下耗能大、断电重启时钟时间重置不足,并且目前安装的太阳能光电板都是固定倾斜角度的,也不能转动,因此在一天中不能接收到更多、更强的太阳光线,导致光电转换效率较低。
技术实现思路
1、1.要解决的技术问题
2、针对现有技术中存在的问题,本发明的目的在于提供一种逐日光伏组件,本发明在实现将太阳能转换为电能的基础上,还可以对太阳板的采集角度和方向进行调节,且可以根据太阳的照射角度变化而变化。
3、2.技术方案
4、为解决上述问题,本发明采用如下的技术方案:
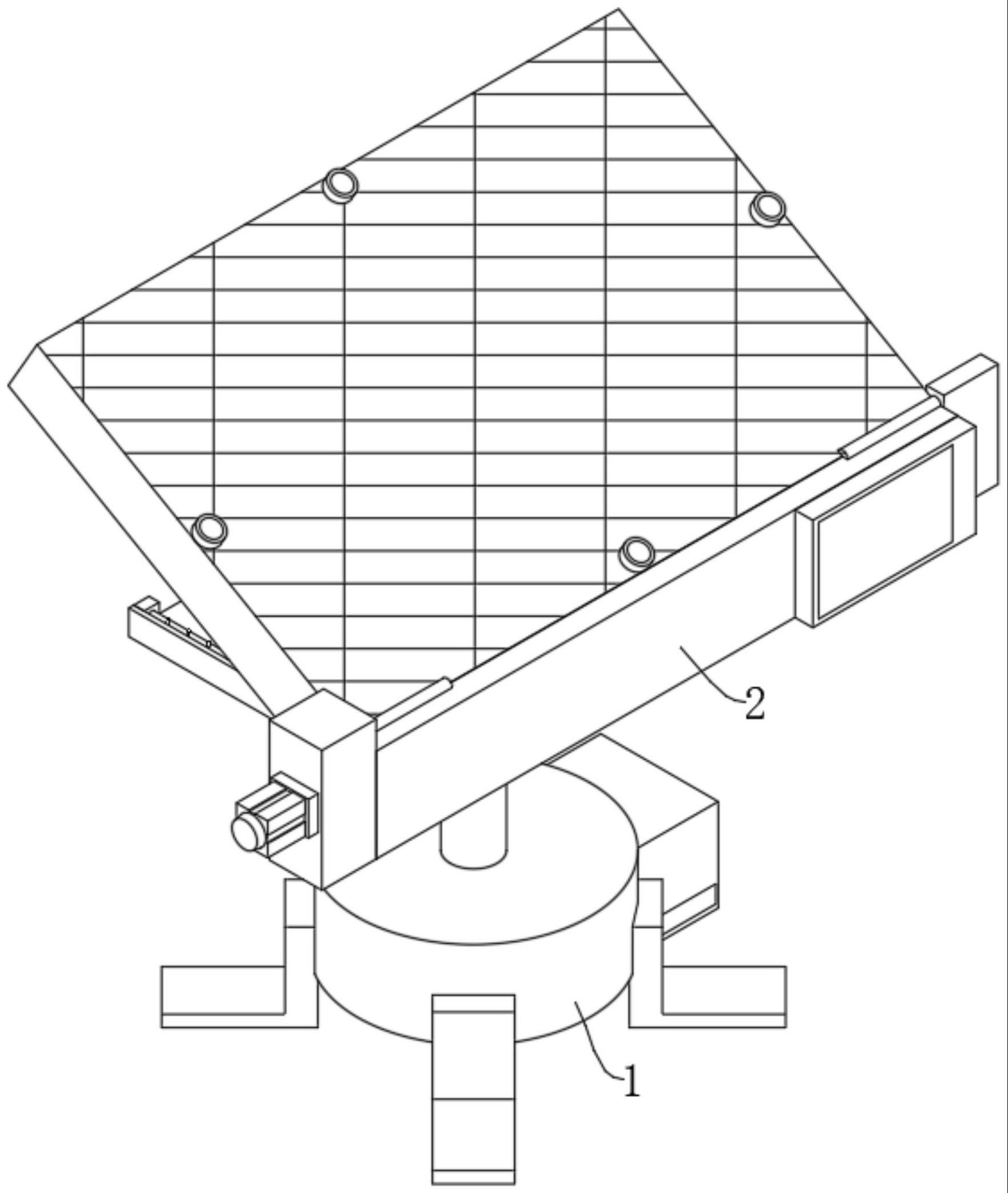
5、一种逐日光伏组件,包括:
6、支撑机构,所述支撑机构包括支撑座,所述支撑座的表面安装有多个支撑腿,所述支撑座的内部转动连接有第一转动轴,所述第一转动轴的表面固定连接有第一齿轮,所述支撑座的内壁转动连接有第二齿轮,所述第二齿轮的表面固定连接有第三齿轮,所述支撑座的内部转动连接有第四齿轮,所述第一转动轴的表面固定连接有第六齿轮,所述支撑座的内壁安装有传动齿环,所述传动齿环的内侧滑动连接有多个第七齿轮,所述支撑座的底部安装有第一伺服电机,以及逐日机构,所述逐日机构包括冲放式电池组,所述冲放式电池组安装于第一转动轴的顶部,所述冲放式电池组的表面安装有单片机,所述冲放式电池组的顶部转动连接有第二转动轴,所述第二转动轴的表面固定连接有太阳能电池板,所述太阳能电池板的表面安装有多个光敏传感器,所述充放式电池组的表面安装有调节支撑板,所述调节支撑板的表面转动连接有两个螺纹杆,所述螺纹杆的表面螺纹连接有移动块,所述移动块的顶部安装有支撑杆,且支撑杆与太阳能电池板接触。
7、作为本发明的一种优选方案,所述第三齿轮与第一齿轮啮合,所述第四齿轮与第二齿轮啮合,多个所述第七齿轮的内侧与第六齿轮啮合,且多个所述第七齿轮的外侧与传动齿环进行啮合,所述第七齿轮的输出轴贯穿支撑座并与第四齿轮固定连接。
8、作为本发明的一种优选方案,所述充放式电池组的一侧安装有驱动箱,所述驱动箱的表面安装有第二伺服电机,所述第二伺服电机的输出轴且位于驱动箱的内侧固定连接有第八齿轮,所述第二转动轴的表面固定连接有第五齿轮,且第五齿轮与第八齿轮啮合。
9、作为本发明的一种优选方案,所述调节支撑板的表面安装有第三伺服电机,且第三伺服电机与一侧所述螺纹杆固定连接,一侧所述螺纹杆的表面设置有传动皮带,且传动皮带与另一侧所述螺纹杆接触。
10、作为本发明的一种优选方案,所述单片机的内部设置有电源电路模块、数据控制模块、时钟模块、sd卡读写模块、阴晴检测电路模块、显示模块、wifi模块和电机控制模块,所述数据控制模块支持视日运动轨迹跟踪模式、光电跟踪模式和远程监测与控制模式,所述数据控制模块用于对单片机进行控制,所述时钟模块用于对时间进行记录并且方便所述数据控制模块对时间进行校对,所述sd卡读写模块用于对sd卡进行读写,所述阴晴检测电路模块用于对天气进行检测,所述显示模块用于对数据进行展示,所述电机控制模块用于对冲放式电池组、太阳能电池板、光敏传感器、第二伺服电机、第三伺服电机和第七齿轮进行控制。
11、作为本发明的一种优选方案,所述电源电路模块用于太阳能电池板吸收光照转化为电流,电流储存到冲放式电池组中,所述冲放式电池组通过升压模块输出稳定的电压电流显示模块,当冲放式电池组存储的能量不足以维持系统的正常运转时,可通过预留的充电口为冲放式电池组充电。
12、作为本发明的一种优选方案,所述wifi模块采用的ap模式,所述wifi模块自身携带热点,内嵌tcp/ip协议,使手机直接与模块之间保持通信,实现系统的远程检测和控制功能,所述wifi模块中vcc用来接3.3v~5v的电源,utxd是该模块的串口发送引脚,可接单片机的串口接收引脚urxd,urxd是模块串口接收引脚,可接单片机的utxd引脚。
13、作为本发明的一种优选方案,所述视日运动轨迹跟踪模式通过计算实时太阳高度角﹑方位角,实现太阳能板垂直吸收太阳光线,在地平坐标系中,太阳的高度角是指太阳光线与当地水平面之间的夹角α,其变化范围为0°~90°,当太阳处于正午时分,高度角α达到最大值,太阳的方位角是指太阳光线在当地水平面的投影与正南方向的夹角β,其变化范围为0°~360°,其中与高度角α互为余角的γ是天顶角,所述视日运动轨迹跟踪策略采用的太阳方位轨迹spa算法,根据当地的经度、纬度以及和海拔参数计算全天从日出到日落的时间范围内的实时太阳高度角和方位角,并将这些数据存储到sd卡读写模块中,所述单片机通过查表的方法调用存储的高度角和方位角数据,第一伺服电机、第二伺服电机和第三伺服电机完成实时方位控制,使太阳能电池板进行角度调节。
14、作为本发明的一种优选方案,所述光电跟踪模式主要与所述阴晴检测电路模块相关联,4个光敏传感器分别接收太阳能电池板4个方位的光照强度,通过光敏电阻值的变化情况判断太阳能板是否保持垂直吸收太阳光的最佳状态,单片机采集通过a/d转换的光敏电阻的电压值,通过数据处理,控制第一伺服电机、第二伺服电机和第三伺服电机的运转,使得太阳能电池板保持在理论上位置,当太阳光垂直照射太阳能板时,4个方位的光敏传感器两端的电压值几乎相同,太阳能电池板不发生转动,当上下、左右的光敏传感器两端的电压差值超过设定的阈值,太阳能电池板向光照强度高的一侧转动,使得上下、左右的电压值小于阈值。
15、作为本发明的一种优选方案,所述远程监测与控制模式用于系统可能出现的突发故障状况和方便实时收集系统数据,如太阳的实时方位角、高度角、系统的实时电压电流和所述阴晴检测电路模块收集到的实时光照强度,所述远程监测与控制模式用于系统主要依赖于所述wifi模块,所述远程监测与控制模式用于系统内置tcp/ip传输控制协议,利用ap工作模式,实现手机和系统相互通信,达到了系统向手机每隔5s发送实时数据、收集远程控制系统工作状态的目的,当系统存在突发故障时,手机端可通过命令,将系统的自动模式切换到人工模式,并针对实际状况,对该组件做出及时调整。
16、3.有益效果
17、相比于现有技术,本发明的优点在于:
18、(1)本发明采用自动模式与人工模式相结合的混合控制的策略,利用计算太阳的实时高度角和方位角,保证系统的跟踪精度,使太阳能电池板始终保持与太阳光线垂直的最佳倾角状态,提高了光电转化率,充分吸收了太阳能,自动模式下,采取光电跟踪模式与视日运动轨迹跟踪模式相结合的策略,使该组件受阴晴天气的影响较小,在人工模式下,独创性地使用wifi模块对逐日光伏发电系统的远程监测与控制实验结果表明,本系统受天气影响小、跟踪准确性高﹑支持远程监测与远程控制,并且能够吸收转化光能为电能,维持自身正常运转,实现能量自供给。
19、(2)本发明通过第一转动轴转动带动逐日机构进行角度调节,从而实现对太阳能电池板的横向角度进行调节,通过螺纹杆转动带动移动块进行移动,移动块移动带动支撑杆进行移动,从而对太阳能电池板的纵向角度进行调节,从而使太阳能电池板可以根据光照强度进行相对应的角度调节,冲放式电池组用于对电能进行存储,通过光敏传感器可以对光照强度进行检测。
- 还没有人留言评论。精彩留言会获得点赞!