电力电子变压器分数阶移相全桥变换器的分数阶控制方法
本发明涉及一种移相全桥变换器控制方法,具体地说是一种电力电子变压器分数阶移相全桥变换器的分数阶控制方法。
背景技术:
1、随着能源转型和智能电网的快速发展,基于第三代半导体技术的电力电子变压器,以其高效率、高功率密度和高温特性,在实现能源转换、传输和分配过程中展现出巨大潜力。与此同时,在柔性变电站等领域,电力系统对于稳定性、可靠性和灵活性的要求也日益提升。为充分发挥基于第三代半导体的电力电子变压器在柔性变电站中的优势,开始关注分数阶移相全桥变换器的建模与控制,从而更好地适应电力系统复杂多变的运行环境。
2、但如何对移相全桥变换器进行精准的控制是目前亟待解决的技术难题。目前基本上都是对基于整数阶模型的移相全桥变换器采用传统pid控制,这种控制方法结构简单、易于设计,对系统模型精确度的要求较低。但人们发现电容和电感元件都是具有分数阶特性的,以往认知中的整数阶电容、电感元件在工程应用中是不符合实际的,传统的移相全桥变换器模型都是建立在整数阶电感和电容基础上的,不能准确的反映移相全桥变换器的特性,甚至可能会得出错误的结论。
3、实际工程应用中,pid控制器的参数适应能力有限,随着分数阶微积分在电气领域的研究深入,难以对基于分数阶移相全桥变换器进行精确控制,也无法保证系统在各种工况下的稳定性。此外,由于操作人员经验的限制,工业现场中许多控制回路的整定效果不佳。分数阶pi控制器的参数选择比传统的整数阶pi控制器更为复杂,需要通过试验或仿真等手段进行参数调整,而且不同的参数组合可能导致系统性能的巨大差异,对硬件实现也有一定要求。同时,基于整数阶模型的各种控制方法,在电感电容阶次较低时可能会得出错误的结论,难以适用于分数阶模型。
技术实现思路
1、本发明的目的就是提供一种电力电子变压器分数阶移相全桥变换器的分数阶控制方法,以解决现在无法对移相全桥变换器进行精确控制的问题。
2、本发明是这样实现的:一种电力电子变压器分数阶移相全桥变换器的分数阶控制方法,包括以下步骤。
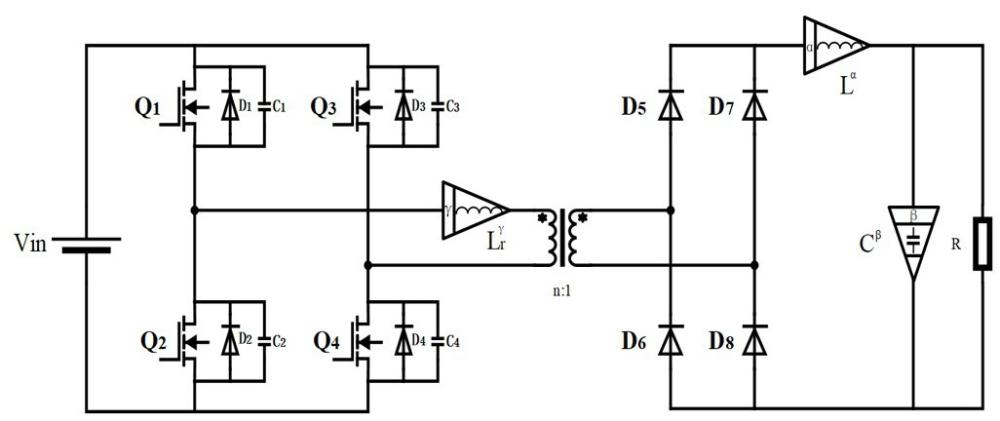
3、步骤1、构建分数阶移相全桥变换器的拓扑图,包括原边全桥逆变电路、高频变压器、副边全桥整流电路以及分数阶电感和分数阶电容。
4、步骤2、建立移相全桥变换器的分数阶状态平均模型,对模型中各状态变量进行扰动,并根据caputo分数阶导数定义得到分数阶移相全桥变换器的交流小信号模型。
5、步骤3、对分数阶移相全桥变换器的交流小信号模型进行分数阶拉普拉斯变换,并建立分数阶移相全桥变换器的控制到输出的分数阶传递函数。
6、步骤4、根据步骤3中分数阶移相全桥变换器的控制到输出的分数阶传递函数,设计分数阶移相全桥变换器的分数阶pi控制系统,并得到分数阶移相全桥变换器控制系统的开环传递函数。
7、步骤5、根据分数阶移相全桥变换器控制系统的开环传递函数,设计分数阶piλ控制器待优化参数的最小目标函数。
8、步骤6、根据所设计的分数阶piλ控制器待优化参数的最小目标函数,利用自适应遗传算法优化分数阶piλ控制器的最优控制参数kp,ki,λ的值。
9、在步骤2中,移相全桥变换器的分数阶状态平均模型为:
10、
11、式中,<vg(t)>t、<il(t)>t、<il1(t)>t、<v0(t)>t、<v1(t)>t、<d(t)>t分别为一个开关周期内输入电压vg、电感电流il、谐振电感电流il1、输出电压v0、谐振电感电压v1、占空比d的平均值。
12、在步骤2中,通过下面的公式对各状态变量进行扰动:
13、
14、式中,vg、v0、il、il1、v1、d分别是输入电压vg、输出电压v0、电感电流il、谐振电感电流il1、谐振电感电压v1、占空比d的直流分量;分别为输入电压vg、输出电压v0、电感电流il、谐振电感电流il1、谐振电感电压v1、占空比d的交流分量。
15、得到的分数阶移相全桥变换器的交流小信号模型如下:
16、
17、在步骤3中,对分数阶移相全桥变换器的交流小信号模型进行分数阶拉普拉斯变换,得到:
18、
19、在步骤3中,分数阶移相全桥变换器的控制到输出的分数阶传递函数gvd(s)为:
20、
21、在步骤4中,分数阶移相全桥变换器的分数阶pi控制系统的控制环节为:移相全桥变换器的实际输出电压v0(s)与参考输出电压vin(s)比较得到误差信号e(s),经过分数阶pi控制器gc(s)得到控制量d(s),最后控制移相全桥变换器的实际输出电压v0(s)保持稳定;
22、其中:
23、
24、式中,kp为比例系数,ki为积分系数,λ(0<λ<2)为积分阶次。
25、在步骤4中,分数阶双有源桥变换器控制系统的开环传递函数go(s)为:go(s)=gvd(s)·gc(s)。
26、在步骤5中,建立的目标函数j为:
27、
28、式中,ω1、ω2、ω3、ω4为函数加权值,e(t)为系统误差,ey(t)=y(t)-y(t-1),y(t)为被控对象的输出;u(t)为控制器输出;tu为上升时间。
29、在步骤6中,利用自适应遗传算法优化分数阶piλ控制器的最优控制参数kp,ki,λ的值包括:
30、6-1、编码:对待整定的参数kp,ki,λ进行实数编码,形成个体;即用长度为10的二进制码分别表示三个变kp,ki,λ,形成一个定长为50的字符串,称为“个体”。
31、6-2、种群初始化:随机产生n个个体,即随机产生n个字符串,n个字符串形成一个群体集合k,将k定义为初始种群。
32、6-3、计算个体的适应度函数值:目标函数j是适应度函数的倒数。
33、6-4、选择/复制:采用精英保留和轮盘赌的选择策略,如果下一代群体中的最佳个体适应度值小于当代最佳个体的适应度值,则将当代群体中最佳个体或者适应度值大于下一代个体适应度值的个体直接复制到下一代并随机替代最差的下一代群体中相应数量的个体。
34、6-5、自适应交叉:随机选择两个相邻的个体,以概率pc进行位置随机交叉,生成两个新的个体,在子代中生成更优的个体。
35、6-6、自适应变异:以概率pm1随机选取群体中的某一个体,再以概率pm2改变其字符串的某一位的值。
36、6-7、终止条件判断:检查是否满足终止条件,若达到预定的迭代次数或者得到满意的解,则迭代终止,并解码和输出寻优结果;若不满足终止条件,则返回步骤6-4,继续迭代寻优过程,直到满足终止条件。
37、本发明采用分数阶控制策略来解决分数阶移相全桥变换器的控制问题,分数阶控制理论将控制器的导数和积分次数从整数扩展到实数或复数,更适用于复杂非线性系统的控制。与传统pid控制相比,分数阶控制器具有更高的精度和稳定性,且可以适应更多的工况变化。
38、本发明针对移相全桥变换器的分数阶模型以及预期效果来指导分数阶移相全桥变换器的分数阶piλ控制器的参数设计,采用自适应遗传算法进行全局寻优,同时使用itae准则作为自适应遗传算法优化参数的最小目标函数,可以获得系统的最优性能。采用分数阶piλ控制方法,该方法可以使系统在实际工作环境或应用需求下,响应速度更快、超调量更小、抗扰动能力更强。与传统pi控制方法相比,分数阶piλ控制方法可以更好地适应复杂的系统动态特性。在实际应用中,分数阶控制器可以实现更加准确的控制。
- 还没有人留言评论。精彩留言会获得点赞!