一种用于智能机器人的无线充电控制系统及方法与流程
本发明涉及无线充电,特别涉及一种用于智能机器人的无线充电控制系统及方法。
背景技术:
1、智能机器人是指集成了人工智能技术的具有感知能力、决策能力和行动能力的机器人,根据应用领域的不同以及智能化程度上的差异,各种智能机器人在感知能力、决策能力和行动能力上也各有差异,随着人工智能技术的发展,还出现了具有自主学习能力和自然语言交互能力的智能机器人。由于智能机器人通常具有自主行动能力,其充电方式通常选择无线充电而非有线充电以避免对其行动能力造成限制。目前常见的智能机器人的无线充电方案是为其配置专门的无线充电仓或者无线充电底座,让智能机器人记住无线充电仓或者无线充电底座的位置以在其电量不足时生成导航路径回到无线充电仓进行充电。这种充电方式极大的限制了智能机器人的使用范围,当智能机器人到了陌生环境下时,将无法实现自主充电。
技术实现思路
1、本发明正是基于上述问题,提出了一种用于智能机器人的无线充电控制系统及方法,能够让智能机器人在不同环境下实现自主充电。
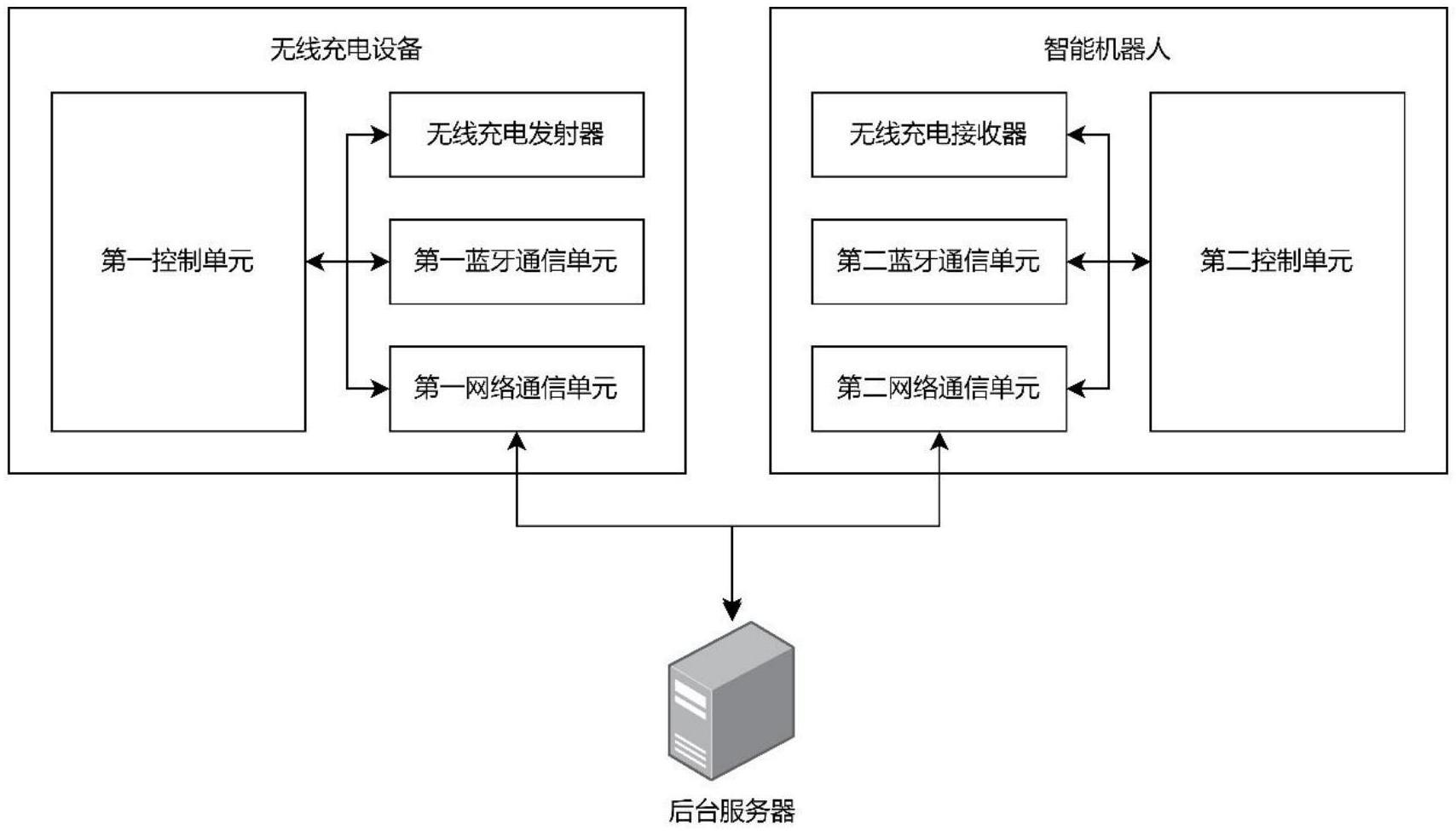
2、有鉴于此,本发明的第一方面提出了一种用于智能机器人的无线充电控制系统,包括后台服务器以及与所述后台服务器通信连接的无线充电设备和智能机器人,所述无线充电设备包括用于将电能转换为无线电磁波能量的无线充电发射器、用于与所述智能机器人进行通信的第一蓝牙通信单元、用于与所述后台服务器进行通信的第一网络通信单元以及用于执行通信和充电控制的第一控制单元,所述智能机器人包括用于将接收到的无线电磁波能量转换为电能的无线充电接收器、用于与所述无线充电设备进行通信的第二蓝牙通信单元,用于与所述后台服务器进行通信的第二网络通信单元以及用于执行通信和充电控制的第二控制单元,所述第二控制单元被配置为:
3、配置授权活动范围,所述授权活动范围由第一位置的第一定位坐标和活动半径构成,所述授权活动范围为以所述第一位置为中心的,以所述活动半径为半径的圆形区域所形成的地域范围;
4、感知并获取无线充电设备的第二位置的位置信息,所述第二位置的位置信息包括所述无线充电设备相对于智能机器人的相对距离和相对方位;
5、根据所述第二位置的位置信息判断所述无线充电设备是否在所述授权活动范围内;
6、当所述无线充电设备在所述授权活动范围内时,对可视范围内的环境进行场景建模得到场景模型;
7、判断所述第二位置是否在可视范围内;
8、当所述第二位置在可视范围内时,识别位于所述第二位置的无线充电发射器标识;
9、在所述场景模型中模拟生成无线充电动作序列,所述无线充电动作序列包括智能机器人移动到的所述无线充电设备处的移动动作序列以及将智能机器人的无线充电接收器靠近所述无线充电发射器标识的无线充电姿态调整动作序列;
10、执行所述无线充电动作序列。
11、本发明的第二方面提出了一种用于智能机器人的无线充电控制方法,包括:
12、配置授权活动范围,所述授权活动范围由第一位置的第一定位坐标和活动半径构成,所述授权活动范围为以所述第一位置为中心的,以所述活动半径为半径的圆形区域所形成的地域范围;
13、感知并获取无线充电设备的第二位置的位置信息,所述第二位置的位置信息包括所述无线充电设备相对于智能机器人的相对距离和相对方位;
14、根据所述第二位置的位置信息判断所述无线充电设备是否在所述授权活动范围内;
15、当所述无线充电设备在所述授权活动范围内时,对可视范围内的环境进行场景建模得到场景模型;
16、判断所述第二位置是否在可视范围内;
17、当所述第二位置在可视范围内时,识别位于所述第二位置的无线充电发射器标识;
18、在所述场景模型中模拟生成无线充电动作序列,所述无线充电动作序列包括智能机器人移动到的所述无线充电设备处的移动动作序列以及将智能机器人的无线充电接收器靠近所述无线充电发射器标识的无线充电姿态调整动作序列;
19、执行所述无线充电动作序列。
20、进一步的,在上述的用于智能机器人的无线充电控制方法中,在感知并获取无线充电设备的第二位置的位置信息的步骤之前,还包括:
21、获取智能机器人当前所处的第四位置的第二定位坐标;
22、根据所述第二定位坐标确定所述第三位置对应的活动范围是否为已建模区域;
23、当所述第四位置对应的活动范围为已建模区域时,获取数据库中存储的对应所述已建模区域的无线充电设备的历史位置信息;
24、在感知并获取无线充电设备的第二位置的位置信息的步骤之后,还包括:
25、判断所述第二位置的位置信息与所述历史位置信息是否匹配;
26、当所述第二位置的位置信息与所述历史位置信息相匹配时,执行在所述场景模型中模拟生成无线充电动作序列以及执行所述无线充电动作序列的步骤;
27、当所述第二位置的位置信息与所述历史位置信息不匹配时,重新执行对可视范围内的环境进行场景建模得到场景模型以及识别位于所述第二位置的无线充电发射器标识的步骤。
28、进一步的,在上述的用于智能机器人的无线充电控制方法中,感知并获取无线充电设备的第二位置的位置信息的步骤具体包括:
29、搜索无线充电设备的蓝牙广播信号,所述蓝牙广播信号携带所述无线充电设备的设备类型和身份标识信息;
30、根据所述无线充电设备的设备类型和身份标识信息判断所述无线充电设备是否为授权充电设备;
31、当所述无线充电设备为授权充电设备时,基于所述蓝牙广播信号的rssi信息计算所述无线充电设备的相对距离;
32、基于所述蓝牙广播信号的aoa信息或aod信息计算所述无线充电设备的相对方位。
33、进一步的,在上述的用于智能机器人的无线充电控制方法中,在确定所述无线充电设备为授权充电设备的步骤之后,还包括:
34、获取后台服务器生成的无线充电设备的蓝牙配对密钥;
35、使用所述蓝牙配对密钥与所述无线充电设备进行配对;
36、配对成功后与所述无线充电设备以建立蓝牙通信连接。
37、进一步的,在上述的用于智能机器人的无线充电控制方法中,根据所述无线充电设备的设备类型和身份标识信息判断所述无线充电设备是否为授权充电设备的步骤具体包括:
38、根据所述无线充电设备的设备类型获取所述无线充电设备所使用的无线充电协议及其输出功率、充电电压;
39、当所述无线充电设备所使用的无线充电协议及其输出功率、充电电压与智能机器人相匹配时,读取智能机器人的授权序列号;
40、将所述授权序列号与所述无线充电设备的身份标识信息上传到后台服务器进行查询;
41、当所述后台服务器返回的查询结果不为空时,确定所述无线充电设备为授权充电设备。
42、进一步的,在上述的用于智能机器人的无线充电控制方法中,将所述授权序列号与所述无线充电设备的身份标识信息上传到后台服务器进行查询的步骤之后,还包括:
43、当所述后台服务器返回的查询结果为空时,确定所述无线充电设备为未授权充电设备;
44、获取当前授权活动范围相关联的联系人的视觉特征;
45、通过视觉传感器搜索可视范围内是否存在与所述视觉特征相匹配的人员;
46、当可视范围内存在与所述视觉特征相匹配的人员时,确定所述联系人所处的第四位置;
47、在所述场景模型中生成对应所述第四位置的第一导航路径;
48、按照所述第一导航路径移动到所述联系人处;
49、通过语音发出充电设备授权请求。
50、进一步的,在上述的用于智能机器人的无线充电控制方法中,在通过视觉传感器搜索可视范围内是否存在与所述视觉特征相匹配的人员的步骤之后,还包括:
51、当可视范围内不存在与所述视觉特征相匹配的人员时,获取与当前授权活动范围相关联的联系人的联系方式;
52、基于所述联系方式向所述联系人发送充电设备授权请求,所述充电设备授权请求包括智能机器人的授权序列号和所述无线充电设备的身份标识信息。
53、进一步的,在上述的用于智能机器人的无线充电控制方法中,在所述场景模型中模拟生成无线充电动作序列的步骤具体包括:
54、判断所述第二位置是否位于可视范围内;
55、当所述第二位置位于可视范围内时,在所述场景模型中生成从当前位置移动到所述第二位置的第二导航路径;
56、将智能机器人按照所述第二导航路径移动到所述第二位置的移动过程分解为第一移动动作序列;
57、当所述第二位置位于可视范围外时,在可视范围内确定与所述第二位置的方位相近的中间节点;
58、在所述场景模型中生成从当前位置移动到所述中间节点的第三导航路径;
59、将智能机器人按照所述第三导航路径移动到所述中间位置的移动过程分解为第二移动动作序列;
60、执行所述第二移动动作序列并在移动过程中实时对可视范围内的环境进行场景建模;
61、重复执行在可视范围内确定与所述第二位置的方位相近的中间节点、在所述场景模型中生成从当前位置移动到所述中间节点的第三导航路径、将智能机器人按照所述第三导航路径移动到所述中间位置的移动过程分解为第二移动动作序列以及执行所述第二移动动作序列并在移动过程中实时对可视范围内的环境进行场景建模的步骤直到所述第二位置位于可视范围内。
62、进一步的,在上述的用于智能机器人的无线充电控制方法中,在所述场景模型中模拟生成无线充电动作序列的步骤还包括:
63、当所述第二位置位于可视范围内时,在以所述第二位置为终点的第二导航路径或第三导航路径上确定与所述第二位置的距离为最小非碰撞距离的第六位置;
64、在以所述第二位置为终点的第二导航路径或第三导航路径上确定与所述第二位置的距离为无线充电距离的第七位置;
65、根据所述无线充电发射器标识的位置在所述场景模型中生成智能机器人的无线充电姿态调整动作序列;
66、在所述场景模型中生成从所述第六位置移动到所述第七位置的的第四导航路径;
67、将智能机器人按照所述第四导航路径移动到所述第七位置的移动过程分解为第三移动动作序列;
68、执行所述无线充电动作序列的步骤具体包括:
69、执行所述第一移动动作序列或所述第二移动动作序列以使智能机器人移动到所述第六位置;
70、执行所述无线充电姿态调整动作序列以使智能机器人进入无线充电姿态;
71、执行所述第三移动动作序列以使智能机器人从所述第六位置移动到所述第七位置。
72、本发明提出了一种用于智能机器人的无线充电控制系统及方法,通过配置授权活动范围,感知并获取无线充电设备的第二位置的位置信息,根据所述第二位置的位置信息判断所述无线充电设备是否在所述授权活动范围内,当所述无线充电设备在所述授权活动范围内时,对可视范围内的环境进行场景建模得到场景模型,当所述第二位置在可视范围内时,识别位于所述第二位置的无线充电发射器标识,在所述场景模型中模拟生成无线充电动作序列,所述无线充电动作序列包括移动动作序列以及无线充电姿态调整动作序列,执行所述无线充电动作序列,能够让智能机器人在不同环境下实现自主充电。
- 还没有人留言评论。精彩留言会获得点赞!