一种实现船舶自驱动动力定位的复合纳米发电装置
本发明涉及船舶能源利用和节能控制领域,尤其涉及一种实现船舶自驱动动力定位的复合纳米发电装置。
背景技术:
1、摩擦纳米发电作为一种新型发电技术,可以收集日常生活中的各种机械能并转化为电能,例如获取环境中的振动能量、风能、水波和人体运动能量。与使用电磁、压电和光伏机制等其他类型的能量收集器相比,摩擦纳米发电机在收集随机和低频环境能量时具有独特的优势。目前,已成功应用于压力检测、运动传感、声学传感、环境监测、安全检查等。
2、动力定位系统主要由测量、控制以及推进三大系统构成,由一系列船用系统综合而成,对环境进行观测之后,控制算法对环境数据进行处理,最终给出推力分配的指令来实现动力定位。近年来船舶动力定位系统不依赖系泊而使用推进器的推力,去抵抗外界的环境干扰,使船舶尽可能的保持在设定位置和艏向。
3、针对无人艇驱动问题,目前传统的驱动方式是传统的柴油驱动,缺点是油耗大,整体工作效率低,自动化程度低。近年来全电力驱动方式逐渐取代传统的柴油驱动方式,相对传统驱动方式具有功率密度高、效率高和成本低等优点。
4、目前对海上电子设备的能源,供应主要依赖于两种:传统电磁式发电机、化学电池和太阳能电池,其使用成本高,效率低。
5、传统的热电技术使用电子或空穴作为工作流体,根据塞贝克效应提供热能到电能的转换技术,利用废热发电,但其必须保持稳定的温度梯度,才能产生可持续的电力。然而,在一个没有梯度的环境中,根据熵增原理,温度在空间上是均匀的,很难实现大温差。此外,基于商业热电材料的热能-电能转换效率仍然很低。因此可以采用热释电效应对其替代进行热量收集。
6、传统的海洋能采集方式主要依靠电磁感应发电机,在采集低频率机械能等方面存在限制。
技术实现思路
1、本发明要解决的技术问题在于针对现有技术的缺陷,提供一种实现船舶自驱动动力定位的复合纳米发电装置。
2、本发明解决其技术问题所采用的技术方案是:
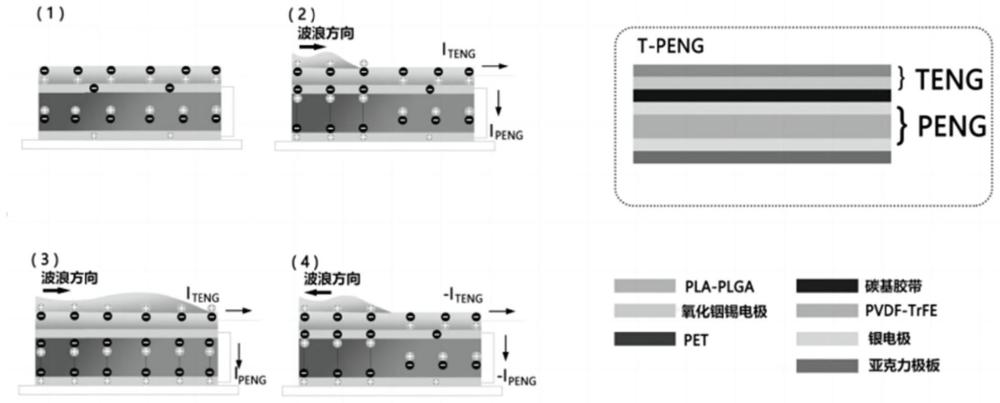
3、本发明提供一种实现船舶自驱动动力定位的复合纳米发电机,该发电机为基于摩擦纳米发电机teng和热释发电机peng的复合纳米发电机t-peng结构,上层为可降解的摩擦纳米发电机teng,中间层为光吸收层,下层为热释发电机peng;同时在摩擦纳米发电机teng和光吸收层之间设置了透明绝缘层,整个t-peng固定在基板上进行支撑和固定。
4、进一步地,本发明的所述可降解的摩擦纳米发电机teng,为单电极结构形式,由电介质层和透明的ito-pet电极构成,电介质层为聚乳酸和聚乳酸-羟基乙酸共聚物的混合物pla-plga薄膜,ito-pet电极经外电路连接后接地。
5、进一步地,本发明的所述中间层为基于碳基胶带制备的光吸收层,碳基胶带具备光-热转化能力。
6、进一步地,本发明的所述热释发电机peng,包括偏氟乙烯-三氟乙烯共聚物pvdf-trfe及两侧银电极,两侧银电极经外电路负载相连,构成闭合电流回路。
7、本发明提供一种实现船舶自驱动动力定位的复合纳米发电机的发电方法,包括以下步骤:
8、步骤一:在波浪的作用下,摩擦纳米发电机teng中的pla-plga薄膜表面电荷密度经过波浪冲刷达到饱和,电荷过量,导致电荷排斥现象产生,将ito-pet电极中的自由电子排斥到接地电极中;在热释发电机peng中,由于光吸收层进行光热转换,产生的热能加剧了内部自由电子的无规则热运动,从而增大了电偶极矩的偏转角度,在碳基胶带和银电极上感应的电荷数量减少;
9、步骤二:受波浪冲刷时,摩擦纳米发电机teng介电层的静电平衡遭到破坏,波浪与pla-plga薄膜接触后,水中的h3o+对pla-plga薄膜表面进行静电屏蔽,原本被排斥到外电路及接地电极中的自由电子回流至ito-pet电极,从而形成由ito-pet电极指向外电路和接地电极的teng输出电流;
10、在热释发电机peng中,波浪冲刷降低了整个发电机的温度,热量从光吸收层向绝缘层、波浪中传递,peng中的感应层pvdf-trfe温度降低,分子无规则热运动减弱,使得电偶极矩的偏转角度变小,pvdf-trfe的上下两面的电荷分布改变,感应电荷密度增加,自由电子运动,产生了由碳基胶带电极指向银电极方向的电流;
11、步骤三:当波浪与t-peng分离时,ito-pet电极中的自由电子由于电荷排斥反应,被pla-plga薄膜表面过量的负电荷排斥至外电路及接地电极中,产生由接地电极指向ito-pet电极的电流;同时,热释发电机中的碳基胶带重新接收太阳照射而升温,吸收的能量使得分子电偶极矩偏转角度增大,感应电荷量减小,自由电子运动,产生方向为银电极指向碳基胶带的电流;
12、步骤四:在海洋波浪能不断冲刷的作用下,复合发电机通过teng和peng的协同工作,不断循环步骤一至三,使得摩擦纳米发电机teng感应电荷分布改变,在ito-pet电极和接地电极之间形成电流,该电流受波浪冲刷速度影响;与此同时,不断加热与冷却光吸收层的过程产生了在碳基胶带和银电极之间不断运动的感应电荷,感应电荷不断运动,使得单次海浪运动中能够产生两部分感应电流,从而供给推进器驱动的能源,实现推进器自驱动。
13、本发明提供一种实现船舶自驱动动力定位的复合纳米发电机的制备方法,制备的t-peng样片包括电介质层,即聚乳酸和聚乳酸-羟基乙酸共聚物的混合物pla-plga薄膜,ito-pet电极,碳基胶带,pvdf-trfe薄膜以及银电极,该方法包括以下步骤:
14、步骤一:将铜胶带分别粘附在pvdf-trfe薄膜上的银电极,并引出接线头;使用静电计测量加热时两个银电极之间的电势差,并根据测得的电势差方向确定pvdf-trfe薄膜的极性;在靠近teng的一侧布置k型热电偶,并用碳基胶带粘附作为吸光层;
15、步骤二:使用磁控溅射仪在pet薄膜上溅射若干微米厚的ito,制备ito-pet电极,使用铜胶带将ito-pet电极的导电侧粘附,并引出接线端;
16、步骤三:将ito-pet电极的绝缘侧粘附在碳基胶带上,使用焊锡分别焊接带有绝缘皮的铜导线在三个接线端上,将铜导线引出作为输出端;使用高温双面胶将未粘附碳基胶带的pvdf-trfe薄膜一侧粘附到pmma基板的中央位置;
17、步骤四:使用聚乳酸和聚乳酸-羟基乙酸共聚物pla-plga的混合物薄膜覆盖样片,并将超出样片范围的四周粘附到pmma基板上,使用防水胶密封四周。
18、本发明提供一种实现船舶自驱动动力定位的复合纳米发电装置,该装置包括依次连接的:复合纳米发电机、全桥整流电路、充放电模块、稳压输出模块以及动力定位系统;其中:
19、复合纳米发电机,用于收集海洋波浪能,输出交流电形式的电压信号,并对电压信号进行ac/dc转换;
20、全桥整流电路,用于对ac/dc转换后的电压信号进行整流;
21、充放电模块,采用储能电容进行充放电;
22、稳压输出模块,采用线性稳压器,包括滤波电路、调整管、负反馈电路,输入电压经过一个滤波电路,去除掉其中的高频杂波和闪烁信号,然后通过调整管导通状态和负反馈电路来实现输出电压的稳定,调整管的导通状态由调整管控制电路来完成;当输入电压发生变化时,调整管自动调整导通状态,以增加或减小其电阻,从而调节输出电压;负反馈电路则用于检测输出电压与设定电压之间的差异,并将其送回到调整管的电路中;通过调整管的导通状态,实现输出电压的稳定,使动力定位系统得到了稳定的电压输入;
23、动力输入系统,采用节能动力定位控制器,用于对海上工作环境中,由波浪、风力、水流变换产生的干扰进行过滤和处理,使推进器维持稳定的动力输出。
24、进一步地,本发明的所述节能动力定位控制器的实现方法包括:
25、步骤一:通过传感器得到的船舶当前的位置、艏向和速度的估计值作为输入,根据位置估计值与位置设定值之间的偏差计算船舶到达设定位置、艏向和速度所需要的控制力;
26、步骤二:节能动力定位控制器根据输入的估计值和定位设置的目标值得到使船舶恢复目标状态所需要的在纵荡、横荡和艏摇三自由度方向的力和力矩的大小,并根据推力分配算法得到各推进器的转速、螺距、转向角的控制指令;
27、步骤三:通过green-nmpc方法找到一组可行的控制动作,利用复合摩擦纳米发电机的可利用能源产生推力,结合最小化成本函数来使系统保持在约束范围内。
28、进一步地,本发明的所述节能动力定位控制器的设计方法包括:
29、利用mss工具箱中的波模块模拟了波的扰动,该模块的输入参数为显著波高hs和平均零交叉波周期tz;利用修正的皮尔森-moskowitz,即mpm,表达式为:
30、s(ω)=ampmω-5exp(-bmpmω-4)
31、其中,s(ω)描述了一个波谱,δω表示频率之间的常数差;ampm和bmpm为:
32、
33、
34、给出了波谱的时域实现方法:
35、
36、其中,βi描述波冲击容器的角度,∈k描述相位,ωk是随机选择的波频率,n个频率和m个方向从范围δω和δβ中选择;波加速度计算如下:
37、
38、
39、通过green-nmpc方法试图找到一组控制动作,通过最小化成本函数来使系统保持在约束范围内:
40、
41、s.t. ηk+1=f(ηk,uk)
42、g(ηk,uk)≤0
43、扩展形式的最后阶段成本函数为:
44、
45、其中,fx和fy是横向和纵向的推进力,tψ是偏航旋转扭矩,权重函数lx,ly被设定为是各轴距的连续变化非线性函数。
46、进一步地,本发明的所述green-nmpc方法具体包括:
47、green-nmpc方法对传统nmpc方法中使用恒定权重矩阵l=[lxlylψ]和π=[π1π2π3]分别表示惩罚输入和状态进行改进;矩阵l的分量被设置为船舶沿x和y方向的位置的函数,满足以下性能标准:
48、(1)如果船舶的位置在安全范围内,则不必关注其位置;节能动力定位控制器的目标是最小化推进器的能量消耗;
49、(2)当船舶接近安全极限时,节能动力定位控制器的优先级变为保持位置和保持船舶在安全极限范围内;
50、通过green-nmpc方法计算所需的推进力即x和y方向的力,以及扭矩,以调节船舶的位置;该方法求解了约束目标函数,以评估每个时间步长的最优控制作用;在每次迭代中使用移动水平预测的固定窗口来求解,在惩罚了状态和控制输入与依据的偏差后,在任意时间步长t0上求解以下目标函数:
51、
52、其中,π是恒定加权矩阵,l是连续变化的非线性函数,xr表示参考状态,t0表示控制计算的开始时间,η和u是时间步长k时的系统状态和推进器,输入系统动力学约束涵盖每个状态(共六个)([η,u]),但只有控制输入uk、位置和方向向量ηk受到惩罚;;fx和fy是横向和纵向的推进力,tψ是偏航旋转扭矩,恒定权重矩阵l=[lxlylψ]和π=[π1π2π3]矩阵分别表示惩罚输入和状态进行改进,矩阵l的分量被设置为船舶沿横向和纵向的位置的函数即为lx和ly。{uk=[fxk,fyk,tψk]}为一些列控制动作,{ηk=[xk,yk,ψk]}为一系列预测动作。
53、通过推力分配算法对节能动力定位控制器发出的合力和合力矩进行分配,使各推进器产生合适的推力和方位角,从而抵抗外界环境载荷,使船舶保持在预定的位置和艏向。
54、本发明产生的有益效果是:
55、本发明采用摩擦纳米发电机(teng)和热释发电机(peng)的复合纳米发电机(t-peng),用于收集海洋波浪能转化为推进器的自驱动能源,其中teng利用波浪的摩擦作用对外供电,peng耦合了光吸收层,,利用海浪退去时光热转换产生的热量和海浪冲击时起到的降温作用之间的时间温度梯度对外供电。具有制造简单、成本低、选材广泛等特点,通过将波浪中中蕴含的能量转换为电能,提高无人艇的续航时间,通过简单的装配在无人船或小型船上,极大的拓展了使用范围。此外:
56、1、相较于现有技术,本发明结合摩擦纳米发电机(teng)和热释发电机(peng)的复合纳米发电机(t-peng),收集海洋波浪能转化为推进器的自驱动能源,复合纳米发电机可以直接将机械能转化为电信号,无需额外的电源,因此它可以更好的实现无人艇的推进器自驱动。
57、2、本发明设计了节能定位控制器,该控制器在保持位置约束的同时最大限度地减少推进器需求。这种新型节能控制器利用了经济非线性模型预测控制器(enmpc)的结构,并采用了“绿色”目标和性能指标,包括推进器能效。利用复合纳米发电机的自驱动能源的同时,实现了无人艇的节能动力定位。
58、3、复合纳米发电机实现一次海浪作用下产生两部分电能的输出,产生的能源可以供给给无人艇的推进器等模块,通过节能动力定位控制器来实现无人艇或小型船舶的节能动力定位。此装置可以通过简单安装,结合使用在多数无人艇或小型船舶,适用范围广,在实现更高效率的能源利用的同时实现无人艇的节能动力定位。
- 还没有人留言评论。精彩留言会获得点赞!