云台步进电机控制方法、装置、计算机设备和云台摄像机与流程
本技术涉及步进电机,特别是涉及一种云台步进电机控制方法、装置、计算机设备和云台摄像机。
背景技术:
1、步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度,该角度称为步进电机的步距角。步进电机输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。因此,步进电动机又称脉冲电动机。
2、步进电机因其结构简单、使用维修方便、制造成本低等优势在各个技术领域得到了广泛的应用,如应用在云台控制技术中的云台步进电机。云台是安装并固定手机、相机、摄像机等摄像设备的支撑设备,可以分为固定云台和电动云台两种类型。电动云台可以在步进电机的驱动下旋转,便于对摄像角度进行控制。
3、在传统技术中,由于步进电机在高速运行时可能导致失步,进而在驱动云台转动时可能存在转动角度误差。而若控制步进电机始终低速运转,又将难以满足云台摄像设备对于目标的跟踪速度要求。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够降低云台转动角度误差的云台步进电机控制方法、装置、计算机设备和云台摄像机。
2、第一方面,本技术提供了一种云台步进电机控制方法。所述云台包括转动连接的固定底座与转动件,所述步进电机用于驱动所述转动件转动,所述固定底座上沿转动方向的多个预设位置上设置有感应模块,所述感应模块用于感应所述转动件是否转动至所述预设位置;所述方法包括:
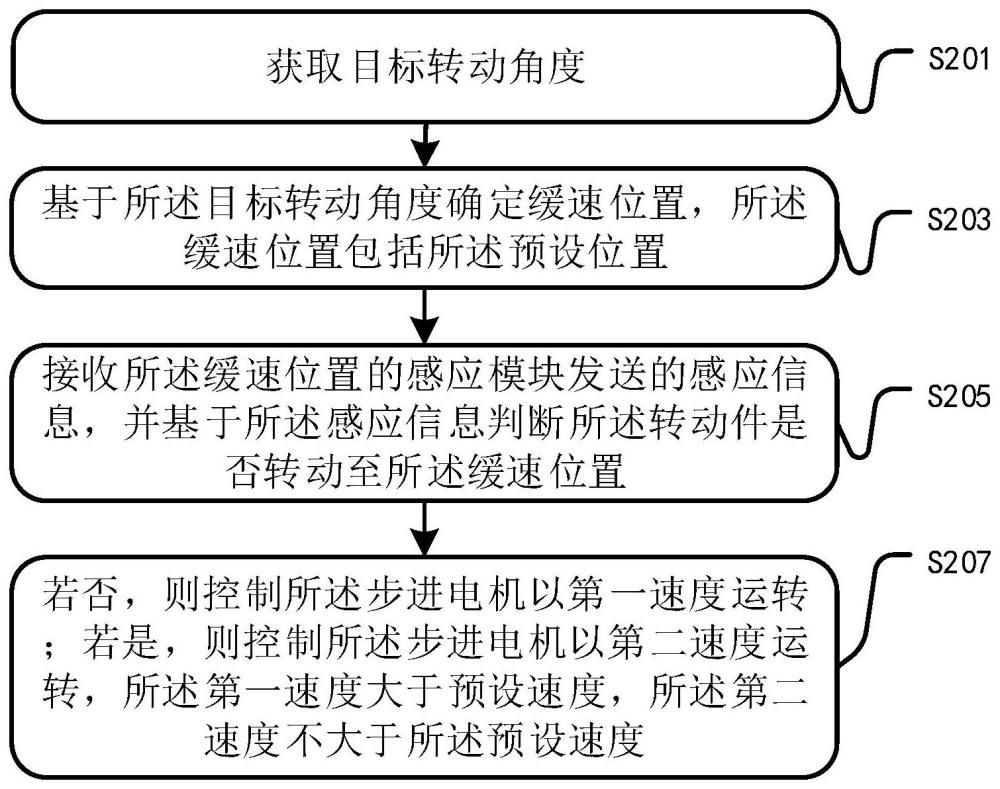
3、获取目标转动角度;
4、基于所述目标转动角度确定缓速位置,所述缓速位置包括所述预设位置;
5、接收所述缓速位置的感应模块发送的感应信息,并基于所述感应信息判断所述转动件是否转动至所述缓速位置;
6、若否,则控制所述步进电机以第一速度运转;若是,则控制所述步进电机以第二速度运转,所述第一速度大于预设速度,所述第二速度不大于所述预设速度。
7、在其中一个实施例中,所述基于所述目标转动角度确定缓速位置包括:
8、判断所述目标转动角度是否大于预设角度;
9、若不大于所述预设角度,则基于所述目标转动角度确定一个缓速位置;
10、若大于所述预设角度,则基于所述目标转动角度确定至少两个缓速位置。
11、在其中一个实施例中,所述基于所述目标转动角度确定一个缓速位置包括:
12、获取转动起始位置;
13、基于所述转动起始位置和所述目标转动角度确定目标终点;
14、确定与所述目标终点距离最近的预设位置为所述缓速位置。
15、在其中一个实施例中,所述基于所述目标转动角度确定至少两个缓速位置包括:
16、获取转动起始位置;
17、基于所述转动起始位置和所述目标转动角度确定目标终点;
18、确定与所述目标终点距离最近的预设位置为第一缓速位置,确定与所述第一缓速位置距离最近的预设位置为第二缓速位置。
19、在其中一个实施例中,所述基于所述感应信息判断所述转动件是否转动至所述缓速位置包括:
20、基于所述感应信息判断所述转动件是否转动至所述第一缓速位置以及第二缓速位置;
21、在所述基于所述感应信息判断所述转动件是否转动至所述缓速位置之后,还包括:
22、若转动至所述第二缓速位置,则控制所述步进电机以第三速度运转;
23、若转动至所述第一缓速位置,则控制所述步进电机以第四速度运转,所述第三速度小于所述第一速度,所述第四速度小于所述第三速度,所述第四速度不大于所述预设速度。
24、在其中一个实施例中,所述转动起始位置基于以下方式确定:
25、获取起始感应模块发送的起始感应信息,所述起始感应模块包括所述转动件转动经过的首个感应模块;
26、基于所述起始感应信息确定所述步进电机步进的第一步数;
27、基于所述第一步数和所述步进电机的预设步进角度确定所述转动起始位置。
28、在其中一个实施例中,在判断所述转动件转动至所述缓速位置之后,还包括:
29、确定所述目标终点和所述缓速位置之间的第二角度;
30、基于所述第二角度和所述步进电机的预设步进角度确定第二步数;
31、判断所述步进电机的行进步数是否达到所述第二步数,若是,则确定所述转动件转动至所述目标终点。
32、第二方面,本技术还提供了一种云台步进电机控制装置。所述云台包括转动连接的固定底座与转动件,所述步进电机用于驱动所述转动件转动,所述固定底座上沿转动方向的多个预设位置上设置有感应模块,所述感应模块用于感应所述转动件是否转动至所述预设位置;所述装置包括:
33、角度获取模块,用于获取目标转动角度;
34、缓速位置确定模块,用于基于所述目标转动角度确定缓速位置,所述缓速位置包括所述预设位置;
35、转动位置判断模块,用于接收所述缓速位置的感应模块发送的感应信息,并基于所述感应信息判断所述转动件是否转动至所述缓速位置;
36、步进电机控制模块,用于若判断所述转动件未转动至所述缓速位置,则控制所述步进电机以第一速度运转;若判断所述转动件已转动至所述缓速位置,则控制所述步进电机以第二速度运转,所述第一速度大于所述第二速度。
37、第三方面,本技术还提供了一种云台摄像机,包括云台、摄像机、步进电机和如上述第二方面所述的云台步进电机控制装置,其中,
38、所述云台包括转动连接的固定底座与转动件,所述固定底座上沿转动方向的多个预设位置上设置有感应模块,所述感应模块用于感应所述转动件是否转动至所述预设位置;所述摄像机设置于所述转动件上;所述步进电机与所述转动件连接,用于驱动所述转动件转动;所述云台步进电机控制装置分别与所述转动件以及所述步进电机连接。
39、在其中一个实施例中,所述转动件上设置有触发模块,所述触发模块用于在转动至所述感应模块的位置时,触发相应感应模块基于所述预设位置发送感应信息。
40、在其中一个实施例中,所述感应模块包括霍尔开关,所述触发模块包括永磁体。
41、第四方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面中任一云台步进电机控制方法的步骤。
42、第五方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面中任一云台步进电机控制方法的步骤。
43、上述云台步进电机控制方法、装置、计算机设备和云台摄像机,通过获取目标转动角度;基于所述目标转动角度确定缓速位置,所述缓速位置包括所述预设位置;接收所述缓速位置的感应模块发送的感应信息,并基于所述感应信息判断所述转动件是否转动至所述缓速位置;若否,则控制所述步进电机以第一速度运转;若是,则控制所述步进电机以第二速度运转,所述第一速度大于所述第二速度。
44、本技术提供的云台步进电机控制方法,通过接收所述缓速位置的感应模块发送的感应信息,并基于所述感应信息判断所述转动件是否转动至所述缓速位置,能够控制电机在转动至缓速位置前以较高的速度运转,在缓速位置后以较低的速度运转,能够满足云台的转动速度需求。另一方面,通过在云台固定底座上沿转动方向的多个预设位置上设置有感应模块,且感应模块用于感应所述转动件是否转动至所述预设位置,即使步进电机在较高速度运转时失步,仍能基于预设位置从客观上确定转动件是否转动至缓速位置,有效降低了云台转动角度误差,提高了云台电极转动角度的控制精度。
45、本技术的一个或多个实施例的细节在以下附图和描述中提出,以使本技术的其他特征、目的和优点更加简明易懂。
- 还没有人留言评论。精彩留言会获得点赞!