一种直线电机及其控制方法与流程
本发明涉及直线电机,更具体地说,本发明涉及一种直线电机及其控制方法。
背景技术:
1、直线电机是一种电机类型,与传统的旋转电机(如直流电机或交流电机)不同,它可以产生直线运动而不是旋转运动,直线电机的工作原理基于洛伦兹力的原理,即在磁场中通过导体通电时会受到力的作用,一般而言,直线电机的工作原理有两种主要类型,电磁式直线电机和电动式直线电机,都基于电流、磁场和运动部件之间的相互作用原理,实现了电能到机械运动的转换,从而实现直线运动;直线电机通常应用于半导体制造、光学系统、医疗设备、航空航天、制造和自动化、实验室设备、数字印刷等领域。
2、现有的直线电机通常设置有动子、线轨,通过动子在线轨上的直线移动使物体能够在直线电机上高速、高精度的移动,然而现有的直线电机不能根据动子的移动状态及时的感知物体在直线电机上移动的精度,存在以下缺陷:
3、若直线电机的移动精度出现问题,该直线电机仍然进行工作,在一些高精度的领域仍继续投入使用,可能会导致生产质量的下降,严重时会导致安全隐患;另外,传统直线电机通常采用相对简单的机械结构,对环境的封闭性能可能较差,一些传统设计可能没有足够的防护措施,容易受到尘埃、湿气和其他环境因素的影响,从而减少直线电机的使用寿命。
4、为了解决上述两个缺陷,现提供一种技术方案。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明的实施例提供一种直线电机及其控制方法以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
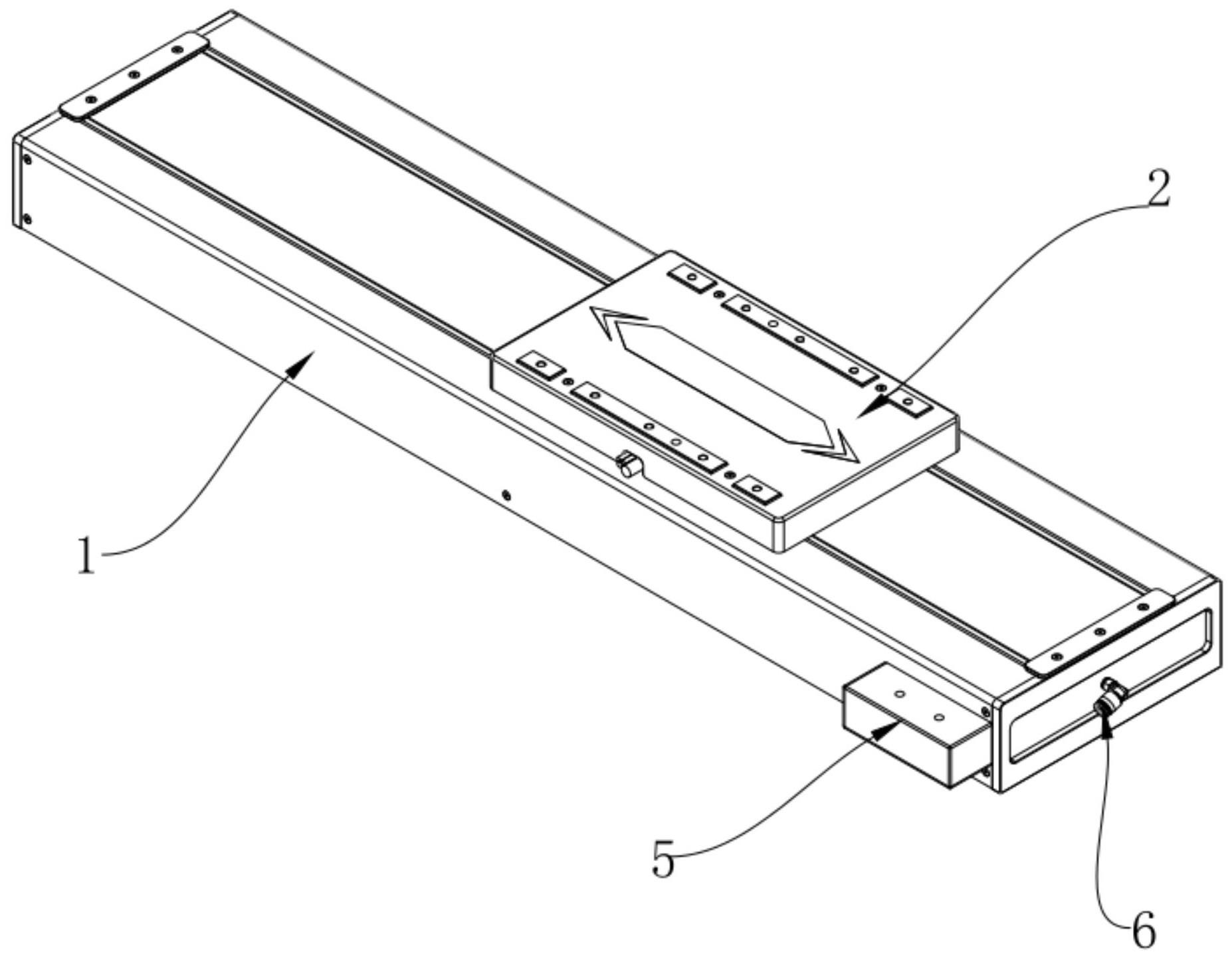
3、一种直线电机,包括直线电机本体,所述直线电机本体的内部设置有移动部件、移动距离信息采集模块、电磁力信息采集模块,所述直线电机本体的外部设置有控制器;
4、移动部件:所述移动部件包括线轨、动子,所述动子在线轨上滑行移动带动整个移动部件在直线电机表面移动;
5、移动距离信息采集模块:用于采集动子移动的实际距离;
6、电磁力信息采集模块:用于采集直线电机运行时产生的电磁力;
7、控制器:控制器的输入端分别与移动距离信息采集模块、电磁力信息采集模块的输出端电性连接,用于接收移动距离信息采集模块、电磁力信息采集模块的输出信号,生成控制指令;
8、控制器分析移动距离信息采集模块以及电磁力信息采集模块的输出信号后,自动控制动子的移动以及直线电机发出报警。
9、在一个优选地实施方式中,所述移动部件包括线轨,所述线轨固定在直线电机本体的底部,所述动子滑动连接在线轨表面,所述动子的上方两侧设置有滚轮a,所述滚轮a之间设置有滚轮b,所述滚轮b的上表面与钢带滑动连接,所述滚轮a的下表面与钢带滑动连接,所述钢带设置在直线电机本体的顶部。
10、在一个优选地实施方式中,所述直线电机本体的两侧对称设置有气管接口,所述气管接口一侧进入气体,所述气管接口的另一侧散出气体。
11、在一个优选地实施方式中,一种直线电机控制方法,包括以下步骤:
12、s1、获取控制器在t时间内移动若干次的实际距离,再通过移动距离信息采集模块获取对应的预设的移动距离,通过t时间内获取的预设距离和实际移动距离计算移动距离偏差系数;
13、s2、获取实际的移动距离上传至系统的数据的时间,再通过监控系统获取系统接受的实际的移动距离数据的时间,通过实际的移动距离上传至系统的数据的时间与系统接受的实际的移动距离数据的时间计算移动部件的数据传输与接收的延迟系数;
14、s3、获取直线电机运行时预设的电磁力的数据,再通过电磁力信息采集模块获取对应的直线电机运行时产生的电磁力的数据,通过直线电机运行时产生的电磁力的数据与对应的预设的电磁力的数据计算电流延迟系数;
15、s4、将移动距离偏差系数、数据传输与接收的延迟系数以及电流延迟系数传递至中央处理器进行综合分析,建立并计算直线电机移动精度的影响系数;
16、s5、并将影响系数与预先设定的影响系数参考阈值进行对比,并根据对比结果控制动子的移动以及直线电机发出报警。
17、在一个优选地实施方式中,所述移动距离偏差系数的获取的逻辑如下:
18、s1、获取控制器在t时间内移动的实际距离与对应的预设的移动距离,将移动的实际距离与对应的预设的移动距离分别标定为和, y表示移动的实际距离与对应的预设的移动距离的编号, y=1、2、3、4、……、 m, m为正整数;
19、s2、计算移动距离偏差系数,计算的表达式为:
20、,式中,为移动距离偏差系数。
21、在一个优选地实施方式中,所述数据传输与接收的延迟系数的获取逻辑为:
22、s1、获取实际的移动距离上传至系统的数据与系统接受的实际的移动距离数据之间的可延迟的时间范围,并将该范围标记为,且;
23、s2:获取实际的移动距离上传至系统的数据的时间与系统接受的实际的移动距离数据的时间,并将实际的移动距离上传至系统的数据的时间与系统接受的实际的移动距离数据的时间分别标定为与 ,w表示实际的移动距离上传至系统的数据的时间与系统接受的实际的移动距离数据的时间的编号, w=1、2、3、4、……、 f, f为正整数;
24、s3:计算系统接受的实际的移动距离数据的时间与实际的移动距离上传至系统的数据的时间的差值,并将差值大于的数值重新标记为, s表示系统接受的实际的移动距离数据的时间与实际的移动距离上传至系统的数据的时间的差值大于的数值的编号, s=1、2、3、4、……、 n, n为正整数;
25、s4、计算数据传输与接收的延迟系数,计算的表达式为:,式中,为数据传输与接收的延迟系数。
26、在一个优选地实施方式中,所述电流延迟系数的获取逻辑为:
27、s1、获取直线电机运行时产生的电磁力的数据与对应的预设的电磁力的数据,并将直线电机运行时电磁力的数据与对应的预设的电磁力的数据标定为和, a表示直线电机运行时产生的电磁力的数据与对应的预设的电磁力的数据的编号, a=1、2、3、4、……、 c, c为正整数;
28、s2、计算电流延迟系数,计算的表达式为:
29、,式中,为电流延迟系数。
30、在一个优选地实施方式中,所述影响系数,表达式为:
31、
32、式中,为影响系数,1、2、3分别为移动距离偏差系数、数据传输与接收的延迟系数以及电流延迟系数的预设比例系数,且1、2、3均大于0。
33、本发明的技术效果和优点:
34、1、本发明通过设置钢带、滚轮a、滚轮b,使得直线电机处于密闭的状态的同时不影响移动部件的运行,同时对直线电机的封闭性能提高,使其不受尘埃、湿气和其他环境因素的影响,减小因外界环境因素导致的直线电机的使用寿命的减少的可能性,同时又在直线电机的两端设置气管接口,保证了直线电机在运行时内部气压的稳定,同时又更好的散热;
35、2、本发明通过采集移动距离偏差系数、数据传输与接收的延迟系数以及电流延迟系数,建立并计算直线电机移动精度的影响系数,并将影响系数与预先设定的影响系数参考阈值进行对比,若影响系数大于影响系数参考阈值,表示此时该直线电机的精度已经出现问题,此时直线电机立刻停止工作,并发出警报提醒工作人员,该直线电机的精度出现问题,不能再继续使用。
- 还没有人留言评论。精彩留言会获得点赞!