一种电机驱动H桥死区自适应调节方法及其调节电路与流程
本发明属于电机驱动领域,进一步来说涉及h桥驱动控制的有刷电机领域,具体来说,涉及一种h桥死区自适应调节的方法。
背景技术:
1、h桥电路是指由4个功率开关构成的,形状类似字母“h”的电路结构,如图1所示。h桥电路是一种典型的直流有刷电机驱动控制电路,广泛应用于电机驱动控制领域中。该驱动系统常采用h桥双极驱动模式,通过两组互补的pwm信号对h桥mos管进行开断,通过控制mos管的开断顺序和开断时间来控制电机转速和转向。
2、h桥驱动电路工作在电源vcc和gnd之间。在进行上下桥臂mos驱动切换时,因为栅极与沟道间的寄生电容的影响,功率mos管构成的开关管的开通不是一瞬间完成的,上升时间和下降时间均会有一定的延时;其危害是在上下桥臂mos管开关的瞬间产生较大的浪涌电流,如图2-3所示。在h桥进行控制上下桥臂mos管开关状态切换时,上桥臂mos管缓慢导通,下桥壁mos管缓慢关闭,该切换状态存在上桥臂mos和下桥壁mos同时导通的时间t1;此时,由于mos管导通阻抗小,产生的电流将非常大。该电流会引起mos管发热非常严重,严重时会导致mos管损坏。为了避免该情况的发生,在电路设计时会刻意在上桥臂与下桥臂之间加入死区时间,如图4所示。通过在上桥臂与下桥臂mos管的开关信号pwm1和pwm2之间添加死区时间t_dead_time,使下桥壁完全关闭后再打开上桥臂,以此来避免上下桥臂切换瞬间浪涌电路过大问题。
3、如图5所示,在电路设计中,死区时间的设定常常是通过高低边mos管的关断延时来确定,为保证h桥能够正常工作,上下桥壁的死区时间应该最小应设定为:t_dead_time>max(t1,t2)。在实际应用环境中,由于mos管的关断延时不仅与mos管本身的生产工艺有关,还与驱动的电压、电流、工作温度等因素有关。为保证系统的稳定性,对于传统的固定死区策略,必须要考虑到外部环境最糟糕的情况进行死区时间设定,所以传统的死区时间制定将在远远大于下降时间t1和t2。但在良好的环境下,上下mos管根本不需要这么长的死区时间,此时会因为死区时间过长而导致系统的工作效率降低。同时,为满足产品多元化的发展需求,在原驱动电路不变的情况下需要兼容不同型号的mos管,对于不同的mos管和不同的应用环境,采用传统的固定死区方式已经无法保证各种应用条件下的通用性。
4、为此本发明采用全新的拓扑结构,主要是针对h桥电机驱动电路中死区设计模块,目的是为了能够在集成电路内部采用最简单、适用、可靠的方法来完成死区的自适应控制,保证同侧上下桥臂不会直通的同时,也能够将系统工作效率实现最大化。
5、有鉴于此,特提出本发明。
技术实现思路
1、本发明所要解决的技术问题是:解决现有电机h桥驱动电路死区时间过长导致的效率不足或脉宽失真,以及同一款驱动电路不能兼容不同型号的mos管和不同应用环境的问题。
2、本发明的发明构思是:基于mos管本身上电和掉电时间延迟考量,充分考量mos管受工艺、温度、走线等影响,在h桥死区设计中加入自适应调节电路,包含mos管栅极电压检测部分和逻辑控制部分,通过检测mos管的栅极电压,判断mos管是处于关断状态。当vgs电压<vth电压时,mos管处于关断状态,当vgs电压>vth电压时,mos管处于开启状态。在mos管开启之前,先检测同侧mos管是否处于关闭状态,然后再开启。
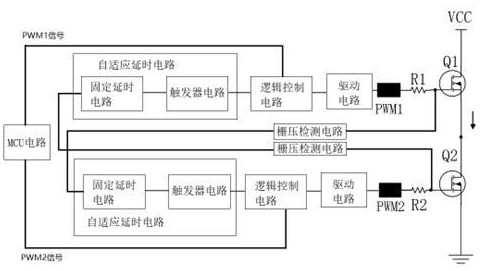
3、为此,本发明提供一种电机驱动h桥死区自适应调节的方法,如图6所示。所述自适应调节方法如下:
4、(1)在h桥死区设计中设置自适应调节电路,自适应调节电路由前级固定延时电路(死区电路)及后级触发器电路组成,固定延时电路产生死区时间,触发器电路产生自适应调节时间;
5、(2)通过对h桥上下臂mos管的栅极电压检测,将检测到的上臂mos管的栅极电压信号输入到下臂自适应调节电路,将检测到的下臂mos管的栅极电压信号输入到上臂自适应调节电路;
6、(3)经过死区时间自适应调节;
7、(4)经过逻辑控制电路对h桥上下臂mos管的开关状态进行逻辑控制判断;
8、(5)逻辑控制判断信号对驱动电路进行控制,使h桥上下臂mos管进入相应的开关状态。
9、所述一种电机驱动h桥死区自适应调节方法的调节电路,如图6所示。包括:mcu电路、上桥臂栅压检测电路、上桥臂自适应延时电路、上桥臂逻辑控制电路、上桥臂驱动电路、上桥臂pwm1信号传输电阻r1、上桥臂mos管q1、下桥臂栅压检测电路、下桥臂自适应延时电路、下桥臂逻辑控制电路、下桥臂驱动电路、下桥臂pwm2信号传输电阻r2、下桥臂mos管q2。
10、所述自适应延时电路由前级固定延时电路(死区电路)及后级触发器电路(死区调节电路)组成。
11、所述mcu电路输出pwm1信号和pwm2信号,pwm1信号与上桥臂逻辑控制电路pwm信号输入端连接,pwm2信号与下桥臂逻辑控制电路pwm信号输入端连接。下桥臂栅压检测电路输出信号与上桥臂自适应延时电路输入端连接,上桥臂栅压检测电路输出信号与下桥臂自适应延时电路输入端连接。上桥臂自适应延时电路输出端与上桥臂逻辑控制电路输入端连接,上桥臂逻辑控制电路输出端与上桥臂驱动电路输入端连接,上桥臂驱动电路输出端,通过电阻r1与q1的栅极连接。下桥臂自适应延时电路输出端与下桥臂逻辑控制电路输入端连接,下桥臂逻辑控制电路输出端与下桥臂驱动电路输入端连接,下桥臂驱动电路输出端,通过电阻r2与q2的栅极连接。q1的漏极接电机工作电源vcc, q1的源极接q2的漏极,q2的源极接地。上桥臂栅压检测电路的输入端与q1的栅极连接,下桥臂栅压检测电路的输入端与q2的栅极连接。
12、mos管栅压检测电路主要是用于检测同侧mos管是否处于关闭状态,逻辑控制电路主要是对pwm驱动信号进行逻辑输出控制。触发器电路的低电平电压阙值与上、下桥臂mos管的vth电压相等,上下桥臂逻辑控制电路分别对上桥臂和下桥臂的输入信号进行逻辑判断。在上桥臂即将打开,下桥臂即将关闭时,mcu给出的pwm1信号为高电平,pwm2信号为低电平。由于q2栅极寄生电容的存在,栅极电压缓慢下降,mos管电压通过固定延时后再检测传输给触发器电路。当q2栅极电压降至触发器电路的低电平阙值时,触发器电路输出高电平,此时逻辑控制电路输入为高电平,输出高电平,将pwm1信号传输至mos管q1,上桥臂mos管q1打开。q2管打开方式同理。根据上下桥臂的mos管栅极电压下降的快慢,自适应死区的时间长度,在理论上等于h桥的最短死区时间。
13、由于触发器电路的输入阙值电压和mos管q1与q2阙值电压会随着温度和芯片的工艺而改变。产生的阙值电压不能保证其匹配性,因此在设计中引入固定延时,采用固定延时和自适应延时协同工作,本发明的固定延时时间相比于单纯在用固定延时的时间要显著缩短。同时,设置逻辑控制电路的传输时间小于10ns,器件延时可忽略。
14、固定延时电路产生的延时时间为固定时间,自适应死区时间主要由触发器电路的阙值决定,因此只需要设计mos管对应的触发器的阙值即可实现死区自适应。
15、与单独的采用固定死区时间相比,自适应死区时间的加入会使mos管在不同的工艺、电压、电流、温度情况下,死区时间能够自动调节至性能最佳值;从而避免了固定死区设置过长导致的效率不足或调制脉宽失真问题;
16、与现有技术相比,本发明具有以下有益的技术效果:
17、本发明通过系统自适应调节电机驱动h桥死区时间,解决了传统固定死区时间导致的系统效率不足问题,同时提升驱动电路对不同型号mos管的兼容性。
18、本发明技术方案可广泛应用于电机h桥驱动电路中。
- 还没有人留言评论。精彩留言会获得点赞!