一种基于尾流仿真模型的风机功率预测方法及装置与流程
本发明涉及风力发电,尤其涉及一种基于尾流仿真模型的风机功率预测方法及装置。
背景技术:
1、近年来,风力发电作为一种清洁能源得到了迅猛的发展。在已有技术中,一般使用尾流仿真模型对风机功率进行预测,以floridyn尾流模型为例,该模型是一种支持三维动态仿真的尾流模型。为引入动态计算,floridyn模型在每个仿真步中在风机表面创建观察点(observation points,ops)。观察点的作用是描述其所在位置的局部gaussian floris尾流特征。观察点继承了其在创建时所属风机的状态,如偏航角、湍流强度、推力系数等,用于在gaussian floris模型计算风速。随着时间的推移,每个观察点向下游移动,代表着大量的空气在风中移动。它们的移动路径由floris尾流区的边界决定。它们的移动速度等于它们所代表的有效风速。
2、但是,floridyn模型的仿真计算时间会随风机数量的增加超线性增长。同时随着风电场规模增大,尾流传播所需要的时间增长,仿真时长急剧增加。在风机数量较多的情况下,计算代价过大,无法应用于优化控制。使得现有技术中存在的尾流模型在风机数量较多的情况下计算代价较大,仿真时长较长,风机功率预测效率低。
技术实现思路
1、本发明提供了一种基于尾流仿真模型的风机功率预测方法及装置,实现有效预测目标风机功率,缩短仿真时长,提高风机功率预测效率。
2、为了解决上述技术问题,本发明实施例提供了一种基于尾流仿真模型的风机功率预测方法,包括:
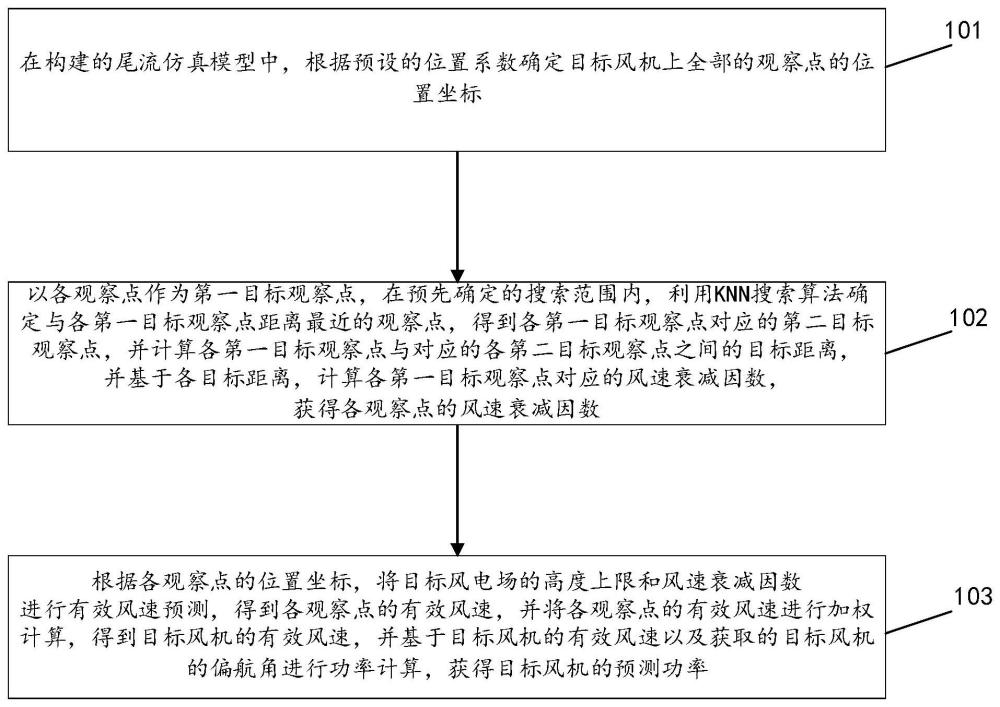
3、在构建的尾流仿真模型中,根据预设的位置系数确定目标风机上全部的观察点的位置坐标;
4、以各观察点作为第一目标观察点,在预先确定的搜索范围内,利用knn搜索算法确定与各第一目标观察点距离最近的观察点,得到各第一目标观察点对应的第二目标观察点,并计算各第一目标观察点与对应的各第二目标观察点之间的目标距离,并基于各目标距离,计算各第一目标观察点对应的风速衰减因数,获得各观察点的风速衰减因数;
5、根据各观察点的位置坐标,将目标风电场的高度上限和风速衰减因数进行有效风速预测,得到各观察点的有效风速,并将各观察点的有效风速进行加权计算,得到目标风机的有效风速,并基于目标风机的有效风速以及获取的目标风机的偏航角进行功率计算,获得目标风机的预测功率。
6、作为优选方案,在构建的尾流仿真模型中,根据预设的位置系数确定目标风机上全部的观察点的位置坐标,具体为:
7、将gaussian floris尾流模型作为底层模型,将floridyn模型作为gaussianfloris尾流模型的动态实现,基于gaussian floris尾流模型和floridyn模型,构建尾流仿真模型;
8、在尾流仿真模型中,将目标风机的表面创建若干个观察点;其中,观察点用于表示所在位置的局部尾流特征;
9、将在各观察点创建时的位置系数作为预设的位置系数,并基于预设的位置系数,确定目标风机上的各观察点的位置坐标,公式为:
10、
11、其中,y和z分别表示观察点在y轴和z轴的位置坐标,kwidth,y和kwidth,z分别表示观察点在y轴和z轴的预设的位置系数;widthy和widthz分别表示观察点处尾流区在y轴和z轴方向上的宽度。
12、作为优选方案,在预先确定的搜索范围内,利用knn搜索算法确定与各第一目标观察点距离最近的观察点,得到各第一目标观察点对应的第二目标观察点,具体为:
13、以预先确定的搜索范围内的观察点作为kd-tree的节点,构建二叉树;
14、将当前的第一目标观察点作为kd-tree的查询点;
15、在预先确定的搜索范围内,利用kd-tree进行搜索时,从二叉树的根节点开始遍历,并比较查询点与当前节点所代表的超矩形区域之间的距离;若查询点位于当前节点的左子树所代表的区域内,则向下遍历左子树,否则,向下遍历右子树;
16、在遍历过程中,记录下查询点最近的若干个节点的数据点,以及数据点与查询点之间的距离,当遍历完二叉树后,返回搜索结果;其中,搜索结果是距离查询点最近的节点的数据点;
17、将搜索结果作为当前的第一目标观察点对应的第二目标观察点。
18、作为优选方案,预先确定的搜索范围,具体为:
19、以目标风机上全部的观察点构成的范围作为初始搜索范围;
20、基于剪枝距离的阈值,对初始搜索范围进行剪枝,以得到预先确定的搜索范围;剪枝距离的阈值根据目标风机的风机直径来确定。
21、作为优选方案,基于剪枝距离的阈值,对初始搜索范围进行剪枝,以得到预先确定的搜索范围,具体为:
22、确定目标风电场的前排风机的观察点的搜索空间的初始搜索范围以及剪枝距离的阈值;
23、在搜索空间中目标风机的初始搜索范围内,保留第一目标观察点与其他观察点之间的距离小于或等于剪枝距离阈值的区域,获得剪枝保留区域,并以剪枝保留区域作为预先确定的搜索范围;其中,预先确定的搜索范围的表达式为:
24、
25、其中,为预先确定的搜索范围,j、i表示不同风机,ωi表示第i台风机的观察点集合,op表示观察点,xmin(j)为第j台风机平面在x轴方向上的最小值,ymin(j)为第j台风机平面在y轴方向上的最小值,zmin(j)为第j台风机平面在z轴方向上的最小值,xmax(j)为第j台风机平面在x轴方向上的最大值,ymax(j)为第j台风机平面在y轴方向上的最大值,zmax(j)为第j台风机平面在z轴方向上的最大值,d为目标风机的风机直径。
26、作为优选方案,基于各目标距离,计算各第一目标观察点对应的风速衰减因数,获得各观察点的风速衰减因数,具体为:
27、判断当前的第一目标观察点对应的目标距离是否小于预设距离阈值;其中,预设距离阈值根据目标风机的风机直径来确定;
28、若否,则当前的第一目标观察点对应的风速衰减因数为0;
29、若是,则计算风速的衰减量与目标风电场无限远处的风速的比值,得到当前的第一目标观察点对应的风速衰减因数;
30、以各第一目标观察点对应的风速衰减因数作为各观察点的风速衰减因数。
31、作为优选方案,根据各观察点的位置坐标,将目标风电场的高度上限和风速衰减因数进行有效风速预测,得到各观察点的有效风速,具体为:
32、根据各观察点的位置坐标,得到各观察点的高度;
33、将各观察点的高度、目标风电场的高度上限和风速衰减因数进行有效风速预测,得到各观察点的有效风速,公式为:
34、
35、其中,ueff,op为当前的观察点的有效风速,ufree,op表示当前的观察点的自由风速,为目标风电场无限远处的风速,zop表示当前的观察点的高度,α为高度衰减因素,z0表示目标风电场的高度上限,rown表示当前的观察点的的尾流衰减因数,nt表示风机数量,ri表示所有属于第台风机的当前的观察点对应的风速衰减因数。
36、为了解决相同的技术问题,本发明实施例还提供了一种基于尾流仿真模型的风机功率预测装置,包括:观察点位置获取模块、距离风速衰减计算模块和风机功率预测模块;
37、其中,观察点位置获取模块用于在构建的尾流仿真模型中,根据预设的位置系数确定目标风机上全部的观察点的位置坐标;
38、距离风速衰减计算模块用于以各观察点作为第一目标观察点,在预先确定的搜索范围内,利用knn搜索算法确定与各第一目标观察点距离最近的观察点,得到各第一目标观察点对应的第二目标观察点,并计算各第一目标观察点与对应的各第二目标观察点之间的目标距离,并基于各目标距离,计算各第一目标观察点对应的风速衰减因数,获得各观察点的风速衰减因数;
39、风机功率预测模块用于根据各观察点的位置坐标,将目标风电场的高度上限和风速衰减因数进行有效风速预测,得到各观察点的有效风速,并将各观察点的有效风速进行加权计算,得到目标风机的有效风速,并基于目标风机的有效风速以及获取的目标风机的偏航角进行功率计算,获得目标风机的预测功率。
40、为了解决相同的技术问题,本发明实施例还提供存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行程序时实现基于尾流仿真模型的风机功率预测方法。
41、为了解决相同的技术问题,本发明实施例还提供一种计算机可读存储介质,其存储有计算机程序,计算机程序被处理器执行时实现基于尾流仿真模型的风机功率预测方法。
42、实施本发明实施例,在构建的尾流仿真模型中,根据预设的位置系数确定目标风机上全部的观察点的位置坐标;以各观察点作为第一目标观察点,在预先确定的搜索范围内,利用knn搜索算法确定与各第一目标观察点距离最近的观察点,得到各第一目标观察点对应的第二目标观察点,并计算各第一目标观察点与对应的各第二目标观察点之间的目标距离,并基于各目标距离,计算各第一目标观察点对应的风速衰减因数,获得各观察点的风速衰减因数;根据各观察点的位置坐标,将目标风电场的高度上限和风速衰减因数进行有效风速预测,得到各观察点的有效风速,并将各观察点的有效风速进行加权计算,得到目标风机的有效风速,并基于目标风机的有效风速以及获取的目标风机的偏航角进行功率计算,获得目标风机的预测功率。利用观察点之间的距离计算衰减因数和筛选,从而无需计算距离较远的观察点之间的数据,有效降低了计算量,解决了现有技术中存在的尾流模型在风机数量较多的情况下计算代价较大,仿真时长较长的问题,从而降低了风机功率预测的计算量,缩短了仿真时长。实现有效预测目标风机功率,缩短仿真时长,提高风机功率预测效率。
43、本发明的其他特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!