非平滑动态特性的风机故障穿越控制策略及参数整定方法与流程
本发明涉及新能源发电并网,尤其是非平滑动态特性的风机故障穿越控制策略及参数整定方法,即基于非平滑动态特性的直驱风机电网故障穿越控制策略及参数整定方法。
背景技术:
1、随着清洁能源的迅猛发展,风力发电作为一种可再生能源的重要组成部分,得到了广泛应用和推广。在风电场中,风机是核心装备之一,其性能稳定性和可靠性对于风电场的运行效率和功率输出至关重要。
2、直驱风机相较于传统风机具有高效节能、稳定可靠、体积小、维护简易和生产环保等优点,在大容量和深远海机型的选择上,直驱风机逐渐取代双馈风机成为风力发电领域的主流趋势。随着海上风电机组装机容量的迅速增长,直驱风机暂态特性成为影响电网稳定性的关键因素之一。因此,开展直驱风电机组暂态特性研究对于分析电网稳定性尤为重要。
3、构建能够直驱风机暂态特性的模型,是研究直驱风机与电网交互特性、分析电网稳定性的基础。控制策略及参数辨识是提高模型拟合效果的重要影响因素,依据实测数据对模型进行校正和优化,能够使模型更好的反应实际直驱风机的暂态特性,从而使得直驱风电机组机网交互作用研究结果,更能反应具体风电机组运行情况,电网稳定性分析结果更准确,同时提高电网运行的稳定性。
4、目前对于直驱风机的建模,主要针对风电机组电机模型,对于变流器的研究大部分集中在变流器稳态特性研究和稳态控制策略模型的构建和参数辨识,但是对于风电机组电网故障穿越条件下的非平滑动态特性的控制策略及参数整定的研究较少。直驱风机电网故障穿越条件下的非平滑特性主要由其故障期间电流控制策略转换所造成,不同类型的故障及其程度对风电机组的影响具有显著差别。通过直驱风机暂态特性模型的故障电流控制策略及参数辨识方法问题的研究,针对不同故障情况选用相应的故障电流控制策略,利用分类型、分段的参数辨识方法以获得更精确的模型描述,能够更好的拟合其非平滑动态特性,在提高仿真准确度的同时,简化系统模型,降低计算复杂度和存储需求,提高仿真效率。因此,辨识具体直驱风机的故障穿越控制策略及控制参数,可以为系统设计和优化提供可靠的依据,是目前直驱风机建模和参数辨识的重要研究方向。
技术实现思路
1、本发明提出非平滑动态特性的风机故障穿越控制策略及参数整定方法,提供一种基于非平滑动态特性的直驱风机电网故障穿越控制策略及参数整定方法,能应用于对直驱风电机组暂态特性参数的辨识,提高仿真模型准确性;该方法有利于获取直驱风机故障穿越控制策略和相关参数,可用于直驱风机机网交互作用机理的研究,在进行直驱风电机组建模时可以提高其非平滑动态特性的建模精确度,使得带有直驱风电机组的电网稳定性分析结果更能反应实际运行情况,提高电网运行分析的准确性和电网运行的稳定性。
2、本发明采用以下技术方案。
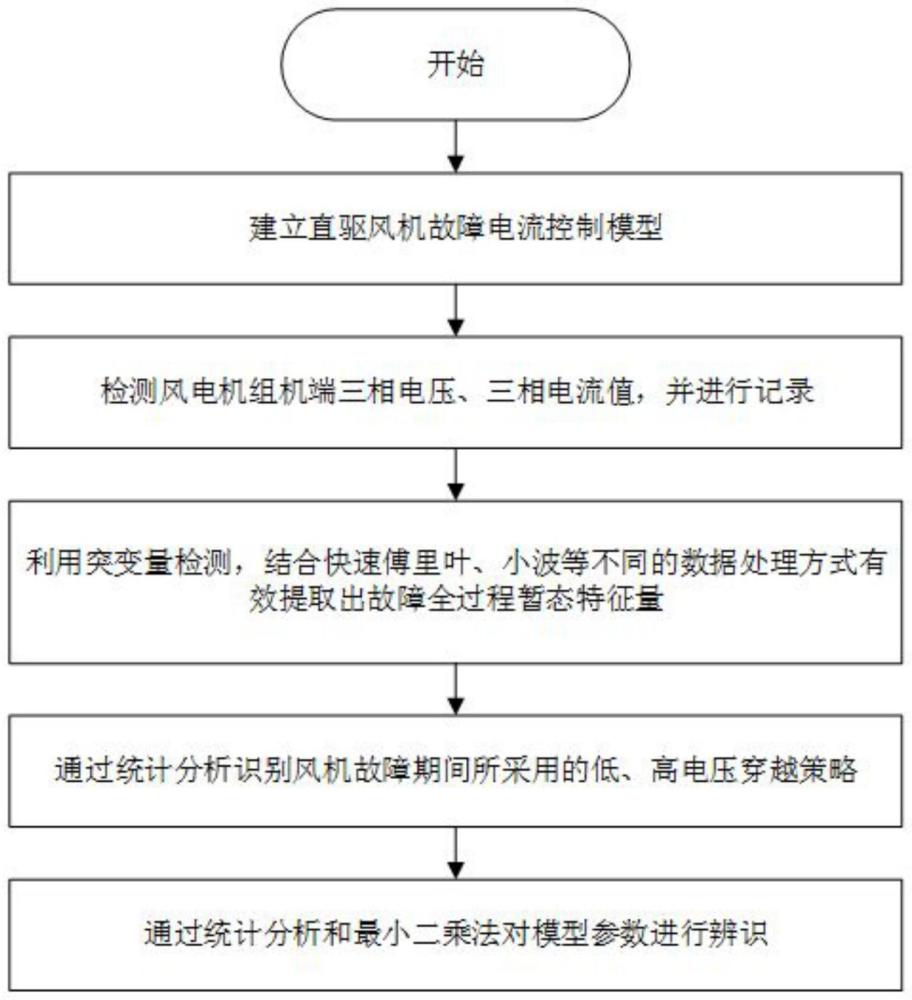
3、非平滑动态特性的风机故障穿越控制策略及参数整定方法,所述方法对电网故障进行分类处理,针对不同类型的故障设计相应的故障穿越控制策略,采用分阶段的方法对控制策略的参数进行整定,包括以下步骤;
4、步骤s1、建立直驱风机故障电流控制模型;
5、步骤s2、获取直驱风机故障期间暂态特性实测数据;
6、步骤s3、进行直驱风机故障电流控制方式辨识;
7、步骤s4、进行故障电流控制方式参数辨识。
8、所述步骤s1中,建立对直驱风机故障电流进行控制的简化模型,包括q轴故障电流控制模型和d轴故障电流控制模型,以适用于低电压穿越和高电压穿越;
9、q轴故障电流控制模型包括3种控制方式,分无功优先和有功优先两种功率控制模式:
10、
11、
12、式中,iq0为故障前无功电流,i为故障期间设计无功电流;iq_fault为故障期间实际无功电流;ut为故障期间风电机组机端电压;uref为采用电压控制方式时计算无功电流的参考值,可与低、高电压穿越判断值不相等;k1q为无功电流支撑系数;qset为指定无功功率值;iq_set为指定无功电流值;
13、d轴故障电流控制模型包括3种控制方式,分无功优先和有功优先两种功率控制模式:
14、
15、
16、式中,id为故障期间设计无功电流;id_fault为故障期间实际无功电流;id_set为指定有功电流值;k1d为有功电流占初始电流的百分比;id0为故障前有功电流值;pset为指定有功功率值;k2d为有功功率占初始功率的百分比。
17、步骤s2的方法具体为,机端设定对称故障,使机端电压降低/抬升,获取风电机组故障发生前后的暂态特性实测数据,该数据包括风电机组变流器低压侧的a、b和c三相的电压和电流瞬时值,步骤如下:
18、步骤s2.1、分别在风电机组大功率输出和小功率并网的方式下,于并网点设置不同电压跌落/升高幅度的故障。
19、步骤s2.2、检测风电机组输出的有功功率pt和无功功率qt、机端三相电压ut、三相电流iabc的瞬时值。
20、步骤s2.3、在同步速旋转坐标系下进行dq解耦控制,得到有功电流id和无功电流iq。
21、步骤s2.4、对三相电压ut和有功功率pt、无功功率qt、有功电流id、无功电流iq的响应曲线进行均匀采样并记录,获取数据序列。
22、步骤s2.4中,为提高参数辨识的准确性,至少获取16组数据,包括2种功率输出工况:大功率容性p>0.9pn,小功率容性0.1pn≤p≤0.3pn;8种电压跌落或抬升工况:跌落0.90±0.05、0.75±0.05、0.50±0.05、0.35±0.05、0.20±0.05,抬升1.30±0.03、1.25±0.03、1.20±0.03。
23、步骤s3中,基于获取的辨识数据,利用突变量检测,结合快速傅里叶、小波等不同的数据处理方式有效提取出故障全过程暂态特征量;步骤如下:
24、步骤s3.1、提取监测数据中的三相电流iabc、有功电流id和无功电流iq最大值imax、id_max和iq_max;
25、步骤s3.2、通过对风电机组极端电压的突变量检测,检测故障发生的时间和故障恢复时间;
26、步骤s3.3、利用快速傅里叶、小波的数据处理方式有效提取出故障全过程暂态特征量;
27、步骤s3.4、识别低、高电压穿越期间的功率控制优先级;基于的原理为:低、高电压穿越期间,在某一功率等级下,若采取有功功率优先于无功功率的控制方式,则随着电压跌落/抬升幅度的增大,无功电流在达到最大值后,会逐渐减少,呈现先增后减或始终维持为0的趋势;若采取无功功率优先于有功功率的控制方式,则随着电压跌落/抬升幅度的增大,无功电流会逐渐增大,直至达到无功功率限制;本步骤中,根据任一功率等级下,无功电流随着电压跌落/抬升幅度的增大是否出现减少进行判断;
28、iq_fault(ut_m+1,pn)-iq_fault(ut_m,pn)≥0;
29、式中iq_fault(ut_m,pn)为故障前风电机组有功出力为pn,故障期间电压跌落/抬升至ut_m时的故障期间无功电流,其中,m越大电压变化量越大,n越大故障前风电机组有功功率输出越大;
30、步骤s3.5、识别低电压穿越期间的无功电流控制方式,具体为:低电压穿越期间,若在任一功率等级下,无功功率值随着电压跌落深度的增加出现增大的情况,则判断为采用电压控制无功电流控制方式:
31、qfault(ut_m+1,pn)-qfault(ut_m,pn)>0
32、式中qfault(ut_m,pn)为故障期间风机输出无功功率值;
33、若在任一功率等级下,无功功率值不随着电压跌落深度的增加而增大,若无功电流值不随电压跌落深度的增加而增大,则判断采用定无功电流的控制方式:
34、iq_fault(ut_m+1,pn)-iq_fault(ut_m,pn)≤0
35、上述情况以外的其他情况则判断为定无功功率的控制方式;
36、步骤s3.6、识别高电压穿越期间的无功电流控制方式,具体为:高电压穿越期间,若在任一功率等级下,无功功率值随着电压跌落深度的增加不出现增大的情况,则判断为采用定无功功率的控制方式:
37、qfault(ut_m+1,pn)-qfault(ut_m,pn)≤0
38、若在任一功率等级下,无功功率值随着电压跌落深度的增加出现增大的情况,若无功电流值不随电压跌落深度的增加而增大,则判断采用定无功电流的控制方式:
39、iq_fault(ut_m+1,pn)-iq_fault(ut_m,pn)≤0
40、上述情况以外其他情况则判断为电压控制无功电流控制方式;
41、步骤s3.7、识别低电压穿越期间的有功电流控制方式,具体为:若任一电压变化量下,不同初始功率等级的有功功率或有功电流相等,则判断采用定有功功率或定有功电流的控制方式:
42、pfault(ut_m,pn+1)-pfault(ut_m,pn)=0
43、ip_fault(ut_m,pn+1)-ip_fault(ut_m,pn)=0
44、若上述两式不成立,当任一功率等级下,有功电流值随着电压跌落深度的增加保持不变或减少,则判断采用有功电流占初始电流的百分比的控制方式,否则采用有功功率占初始功率的百分比的控制方式:
45、ip_fault(ut_m+1,pn)-iq_fault(ut_m,pn)≤0;
46、步骤s3.8、识别高电压穿越期间的有功电流控制方式;具体为:采用与低电压穿越同样的辨识方法判断采用定有功功率或定有功电流的控制方式;若不是采用定有功功率或定有功电流的控制方式,当任一功率等级下,有功功率值随着电压跌落深度的增加保持不变或减少,则判断采用有功功率占初始功率的百分比的控制方式,否则采用有功电流占初始电流的百分比的控制方式:
47、pfault(ut_m+1,pn)-pfault(ut_m,pn)≤0。
48、步骤s3.4的模型中,无功电流随着电压跌落/抬升幅度的增大没有出现减少,但实际低、高电压穿越策略采用有功优先的情况,不影响最终的仿真拟合效果;
49、步骤s4中,基于获取的辨识数据和辨识出的低、高电压穿越期间无功、有功控制方式通过统计分析和最小二乘法对模型参数进行辨识;
50、当采用电压控制电流的无功功率控制方式时,依据快速傅里叶、小波等方法,计算出故障前无功电流的直流分量作为故障前无功电流值,提取出无功电流增大的电压区间,剔除无功电流最高点的数据通过最小二乘法进行线性拟合,步骤如下:
51、步骤s4.1、计算数据的平均值;
52、
53、
54、式中,ut_mean为实测数据结果中故障期间的电压平均值,iq_fault_mean为实测数据结果中故障期间的无功电流平均值;
55、步骤s4.2、计算每个数据点与平均值之间的差异;
56、dut_m=ut_m-ut_mean
57、diq_fault(ut_m)=iq_fault(ut_m)-iq_fault_mean
58、式中,dut_m为实测数据结果中故障期间的电压与电压平均值的差值,diq_fault为实测数据结果中故障期间的无功电流与无功电流平均值的差值;
59、步骤s4.3、计算无功电流支撑系数k1q和无功电流参考值uref
60、
61、
62、当采用定无功功率、定无功电流、定有功功率或定有功电流的控制方式,其无功功率、无功电流、有功功率或有功电流值等于故障穿越期间的最大无功功率、无功电流、有功功率或有功电流值;
63、当采用有功电流占初始电流的百分比或有功功率占初始功率的控制方式,k1d等于不同功率等级下,电压变化量最小的工况下的有功电流与初始电流比值的最大值:
64、
65、k2d等于不同功率等级下,电压变化量最小的工况下的有功功率与初始功率比值的最大值:
66、
67、本发明提出非平滑动态特性的风机故障穿越控制策略及参数整定方法,提供一种基于非平滑动态特性的直驱风机电网故障穿越控制策略及参数整定方法,能应用于对直驱风电机组暂态特性参数的辨识,提高仿真模型准确性。
68、本发明所述方法有利于获取直驱风机故障穿越控制策略和相关参数,可用于直驱风机机网交互作用机理的研究,在进行直驱风电机组建模时可以提高其非平滑动态特性的建模精确度,使得带有直驱风电机组的电网稳定性分析结果更能反应实际运行情况,提高电网运行分析的准确性和电网运行的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!