一种双馈风电机组快速有功控制的方法及装置与流程
本发明属于风电机组控制,具体涉及一种双馈风电机组快速有功控制的方法及装置。
背景技术:
1、随着风电、光伏发电等新能源装机规模不断扩大,发电量快速增长,系统惯量水平能力不断下降,一旦受到功率扰动极易引发频率安全问题。因此,风电场应具备快速有功控制功能,通过提供惯量响应和一次调频响应性能实现对风电的频率主动支撑能力,促使风电主动参与系统频率响应,保障电力系统安全稳定运行。
2、风电机组作为一种大型旋转设备,在运行时旋转器件(叶片、发电机转子等)储存了一定的动能,通过附加控制可在系统频率发生变化时释放一部分旋转动能给电网或者从电网吸收一定的电能转化为旋转动能,从而在短时间内实现快速改变风机有功出力,模拟同步发电机组主动参与电力系统频率控制。在实际应用中风电机组的快速有功响应,基于转子动能完成,通过短时间释放或吸收转子动能完成的,就是直接将所需的有功变化量通过控制发电机的电磁转矩变化实现,机组响应10%的额定功率的时间基本是在400到500ms之间,响应时间较慢。而随着越来越多新能源接入电网后,机组的频率响应特性不能满足高比例接入系统后的要求,容易增加系统暂态失稳风险。
3、因此,亟需缩短风电机组快速有功响应时间来改善频率响应特性,但是如果缩短风电机组快速有功控制响应时间,即短时间内快速释放、吸收能量导致机组电磁力矩发生大的扰动,继而会破坏风电机组传动链轴系平衡,极大地增加传动链轴系部件载荷。在风电机组正常有功控制过程中,风电机组多采用增加阻尼控制策略,即将采集的发电机转速,经过多个滤波器和相应的相位补偿后,叠加到电磁转矩指令上,但是这种增加阻尼控制过程,整个控制周期需要进行滤波处理,时间周期较长而且极易造成功率波动。实际应用中,为了实现快速有功响应,机组往往没有增加阻尼控制,不考虑因快速有功控制引起风电机组传动链疲劳载荷的增长,这将造成风电机组传动链疲劳载荷增加,容易降低风电机组的使用寿命,增加风电机组的维护成本。
技术实现思路
1、为克服上述相关技术中存在的问题,本技术提供一种双馈风电机组快速有功控制的方法及装置。
2、第一方面,提供一种双馈风电机组快速有功控制的方法,包括:
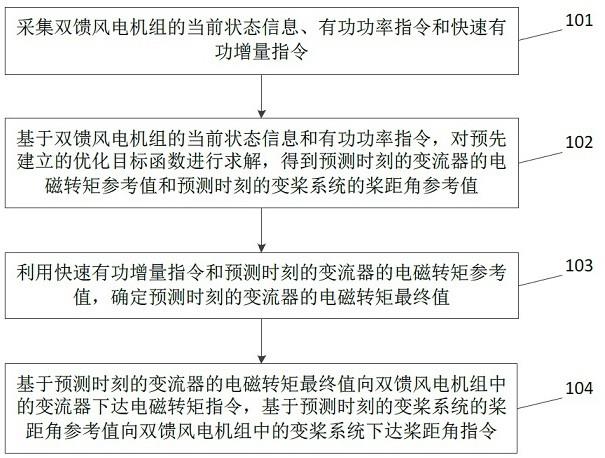
3、采集双馈风电机组的当前状态信息、有功功率指令和快速有功增量指令;
4、基于所述双馈风电机组的当前状态信息和所述有功功率指令,对预先建立的优化目标函数进行求解,得到预测时刻的变流器的电磁转矩参考值和预测时刻的变桨系统的桨距角参考值;
5、利用所述快速有功增量指令和所述预测时刻的变流器的电磁转矩参考值,确定预测时刻的变流器的电磁转矩最终值;
6、基于所述预测时刻的变流器的电磁转矩最终值向双馈风电机组中的变流器下达电磁转矩指令,基于所述预测时刻的变桨系统的桨距角参考值向双馈风电机组中的变桨系统下达桨距角指令。
7、优选的,所述基于所述双馈风电机组的当前状态信息和所述有功功率指令,对预先建立的优化目标函数进行求解,包括:
8、将预先建立的双馈风电机组有功控制预测模型代入所述优化目标函数,并基于所述双馈风电机组的当前状态信息和所述有功功率指令,利用二次规划方法对所述优化目标函数进行求解,得到预测时刻的变流器的电磁转矩参考值和预测时刻的变桨系统的桨距角参考值。
9、优选的,所述利用所述快速有功增量指令和所述预测时刻的变流器的电磁转矩参考值,确定预测时刻的变流器的电磁转矩最终值,包括:
10、利用所述快速有功增量指令计算得到变流器的电磁转矩前馈参考值;
11、将所述变流器的电磁转矩前馈参考值和所述预测时刻的变流器的电磁转矩参考值相加,得到所述预测时刻的变流器的电磁转矩最终值。
12、优选的,所述优化目标函数的建立过程包括:
13、以双馈风电机组的传动链扭矩变化最小为目标构建第一目标函数;
14、以跟踪双馈风电机组的有功功率指令为目标构建第二目标函数;
15、以跟踪双馈风电机组参考转速中的风轮转速为目标构建第三目标函数;
16、以跟踪双馈风电机组参考转速中的发电机转速为目标构建第四目标函数;
17、基于所述第一目标函数、所述第二目标函数、所述第三目标函数和所述第四目标函数构建所述优化目标函数。
18、优选的,所述双馈风电机组有功控制预测模型的建立过程,包括:
19、构建双馈风电机组模型;
20、利用小信号增量法对所述双馈风电机组模型进行线性化,得到线性化双馈风电机组模型;
21、基于所述线性化双馈风电机组模型,利用模型预测控制方法构建双馈风电机组有功控制预测模型。
22、优选的,所述双馈风电机组模型,包括:气动模型、传动系统模型、电气控制模型。
23、优选的,所述基于所述线性化双馈风电机组模型,利用模型预测控制方法构建双馈风电机组有功控制预测模型,包括:
24、利用模型预测控制方法,将所述线性化双馈风电机组模型变换为状态空间方程;
25、基于所述状态空间方程,构建双馈风电机组有功控制预测模型。
26、优选的,所述双馈风电机组的当前状态信息,包括:
27、风轮转速、发电机转速、传动链扭转角、变流器的电磁转矩和变桨系统的桨距角。
28、优选的,所述电磁转矩前馈参考值的计算式,包括:
29、
30、上式中,为电磁转矩前馈参考值,为快速有功增量指令,ωg为发电机转速,kδ为电磁转矩前馈系数。
31、优选的,所述优化目标函数,包括:
32、
33、上式中,obj为优化目标函数,obj1为第一目标函数,obj2为第二目标函数,obj3为第三目标函数,obj4为第四目标函数。
34、优选的,所述第一目标函数包括:
35、
36、所述第二目标函数包括:
37、
38、所述第三目标函数包括:
39、
40、所述第四目标函数包括:
41、
42、上式中,j∈[1,np],np为预测步长;k∈[0,f],f为最大采样时刻;obj1为第一目标函数,w1为权重,δts为传动链扭矩变化量,δts(k+j|k) 为在第k时刻预测第k+j时刻的传动链扭矩变化量,obj2为第二目标函数,为有功功率指令,w2为权重,pg为机组有功功率,pg(k+j|k) 为在第k时刻预测第k+j时刻的机组有功功率,obj3为第三目标函数,w3为权重,ωr为风轮转速,ng为增速比,kopt为最大功率跟踪系数,ωr(k+j|k) 为在第k时刻预测第k+j时刻的风轮转速,obj4为第四目标函数,w4为权重,ωg为发电机转速,ωg(k+j|k)为在第k时刻预测第k+j时刻的发电机转速。
43、优选的,所述双馈风电机组有功控制预测模型,包括:目标函数和约束条件;
44、所述目标函数包括:
45、
46、所述约束条件包括:
47、
48、上式中,x为状态变量,u为控制变量,y为输出变量,其中,控制变量为变流器的电磁转矩的变化量和变桨系统的桨距角的变化量,输出变量为传动链扭矩、机组有功功率变化量、风轮转速变化量和发电机转速变化量,状态变量为风轮转速、发电机转速、传动链扭转角、变流器的电磁转矩的变化量和变桨系统的桨距角的变化量;x(k+1)为第k+1时刻的状态变量,x(k)为第k时刻的状态变量,u(k)为第k时刻的控制变量,ad、bd、cd和ed为参数矩阵,ed(k)为第k时刻的参数矩阵,y(k+1)为第k+1时刻的输出变量,θ为变桨系统的桨距角,θmin为变桨系统的桨距角的最小值,θmax为变桨系统的桨距角的最大值,δθ为变桨系统的桨距角变化量,δθmin为变桨系统的桨距角变化量最小值,δθmax为变桨系统的桨距角变化量最大值,δtgmin为发电机电磁转矩变化量最小值,δt为发电机电磁转矩变化量,δtgmax为发电机电磁转矩变化量最大值,t为发电机电磁转矩,tgmax为发电机电磁转矩最大值。
49、优选的,所述参数矩阵ad包括:
50、
51、所述参数矩阵bd包括:
52、
53、所述参数矩阵cd包括:
54、
55、所述参数矩阵ed包括:
56、
57、上式中,t为时间,e为以e为底的指数函数,ac、bc、cc和ec均为参数矩阵,t0为采样周期。
58、优选的,所述气动模型的计算式包括:
59、
60、所述传动系统模型的计算式包括:
61、
62、
63、所述电气控制模型的计算式包括:
64、
65、
66、
67、
68、上式中,tr为风电机组气动扭矩,ρ为空气密度,r为风轮半径,v为风速,cp为风电机组风能利用系数,ωr为风轮转速,jr为风轮转动惯量,jg为发电机转动惯量,ωg为发电机转速,ηg为风机增速比,tg为双馈风电机组的电磁转矩,为变流器的电磁转距参考值,τg为变流器的电磁转距控制时间常数,s为复变量,θ为变桨系统的桨距角,为变桨系统的桨距角参考值,为变桨系统的桨距角控制时间常数,θs为传动链的扭转角,ts为风电机组传动链扭矩,k为传动链刚度系数,d为传动链阻尼系数。
69、优选的,所述线性化双馈风电机组模型,包括:
70、
71、上式中,jr为风轮转动惯量,k为传动链刚度系数,ηg为风机增速比,δωr为风轮转速变化量,δθ为变桨系统的桨距角变化量,δv为风速变化量,ωg为发电机转速,δωg为发电机转速变化量,δθs为传动链的扭转角变化量;jg为发电机转动惯量,d为传动链阻尼系数,δtg为发电机电磁转矩变化量;τg为变流器的电磁转距控制时间常数,为变流器的电磁转矩参考值变化量,为变桨系统的桨距角控制时间常数,tg为双馈风电机组的电磁转矩,为变桨系统的桨距角参考值变化量,δts为传动链扭矩变化量,δpg为机组有功功率变化量,、、均为在当前采样点由风电机组气动扭矩tr的一阶泰勒近似得出的系数。
72、优选的,所述状态空间方程,包括:
73、
74、上式中,x'为x的导数,x为状态变量,u为控制变量,y为输出变量,ac、bc、cc和ec均为参数矩阵;其中,控制变量为变流器的电磁转矩的变化量和变桨系统的桨距角的变化量,输出变量为传动链扭矩、机组有功功率变化量、风轮转速变化量和发电机转速变化量,状态变量为风轮转速、发电机转速、传动链扭转角、变流器的电磁转矩的变化量和变桨系统的桨距角的变化量。
75、优选的,所述参数矩阵ac的计算式包括:
76、
77、所述参数矩阵bc的计算式包括:
78、
79、所述参数矩阵cc的计算式包括:
80、
81、所述参数矩阵ec的计算式包括:
82、
83、上式中,、在当前采样点由机组有功功率pg的一阶泰勒近似得出的系数;
84、、、是在当前采样点由风电机组气动扭矩tr的一阶泰勒近似得出的系数;d为传动链阻尼系数,k为传动链刚度系数,ηg为风机增速比,jr为风轮转动惯量,jg为发电机转动惯量,τg为变流器的电磁转距控制时间常数,为变桨系统的桨距角控制时间常数,δv为风速变化量。
85、第二方面,提供一种双馈风电机组快速有功控制的装置,包括:
86、采集单元,用于采集双馈风电机组的当前状态信息、有功功率指令和快速有功增量指令;
87、求解单元,用于基于所述双馈风电机组的当前状态信息和所述有功功率指令,对预先建立的优化目标函数进行求解,得到预测时刻的变流器的电磁转矩参考值和预测时刻的变桨系统的桨距角参考值;
88、第一确定单元,用于利用所述快速有功增量指令和所述预测时刻的变流器的电磁转矩参考值,确定预测时刻的变流器的电磁转矩最终值;
89、第二确定单元,用于基于所述预测时刻的变流器的电磁转矩最终值向双馈风电机组中的变流器下达电磁转矩指令,基于所述预测时刻的变桨系统的桨距角参考值向双馈风电机组中的变桨系统下达桨距角指令。
90、优选的,所述求解单元,具体用于:
91、将预先建立的双馈风电机组有功控制预测模型代入所述优化目标函数,并基于所述双馈风电机组的当前状态信息和所述有功功率指令,利用二次规划方法对所述优化目标函数进行求解,得到预测时刻的变流器的电磁转矩参考值和预测时刻的变桨系统的桨距角参考值。
92、优选的,所述第一确定单元,具体用于:
93、利用所述快速有功增量指令计算得到变流器的电磁转矩前馈参考值;
94、将所述变流器的电磁转矩前馈参考值和所述预测时刻的变流器的电磁转矩参考值相加,得到所述预测时刻的变流器的电磁转矩最终值。
95、第三方面,提供一种计算机设备,包括:一个或多个处理器;
96、所述处理器,用于存储一个或多个程序;
97、当所述一个或多个程序被所述一个或多个处理器执行时,实现所述的双馈风电机组快速有功控制的方法。
98、根据本技术实施例的第四方面,提供一种计算机可读存储介质,其上存有计算机程序,所述计算机程序被执行时,实现所述的双馈风电机组快速有功控制的方法。
99、本发明上述一个或多个技术方案,至少具有如下一种或多种有益效果:
100、本发明提供的一种双馈风电机组快速有功控制的方法及装置,包括采集双馈风电机组的当前状态信息、有功功率指令和快速有功增量指令;基于双馈风电机组的当前状态信息和有功功率指令,对预先建立的优化目标函数进行求解,得到预测时刻的变流器的电磁转矩参考值和预测时刻的变桨系统的桨距角参考值;利用快速有功增量指令和预测时刻的变流器的电磁转矩参考值,确定预测时刻的变流器的电磁转矩最终值;基于预测时刻的变流器的电磁转矩最终值向双馈风电机组中的变流器下达电磁转矩指令,基于预测时刻的变桨系统的桨距角参考值向双馈风电机组中的变桨系统下达桨距角指令。本发明通过增加电磁转矩前馈控制技术,实现快速有功控制,同时考虑风电机组在快速有功控制过程中带来的传动链扭振变大问题,增加风电机组的传动链扭矩变化小以及避免机组转速发生大范围波动为优化目标,实现了降低风电机组传动链动态载荷和机组转速波动,确保机组安全稳定运行,从而满足高比例新能源接入电网后系统对调频的需求。
- 还没有人留言评论。精彩留言会获得点赞!